
يخطب
قم بتشغيل قسم المشاركة
ACTS هو ما سيفعله المعلم و ASKS هو كيف سيقوم المعلم بتيسير العملية.
| أعمال | يسأل |
|---|---|
|
|
إعداد الطلاب للبناء
دعونا نجهز أذرعنا الروبوتية، حتى نتمكن من جعلها أكثر ذكاءً!
تسهيل البناء
-
تعليماتاطلب
طالبين الانضمام إلى مجموعاتهم، واطلب منهم إكمال ورقة روتين أدوار الروبوتات &. استخدم
شريحة مسؤوليات الأدوار المقترحة في عرض شرائح صور المختبر كدليل للطلاب لإكمال هذه الورقة.
- أطلب من الطلاب التحقق من جميع المواد الخاصة بهم للتحضير للمختبر.
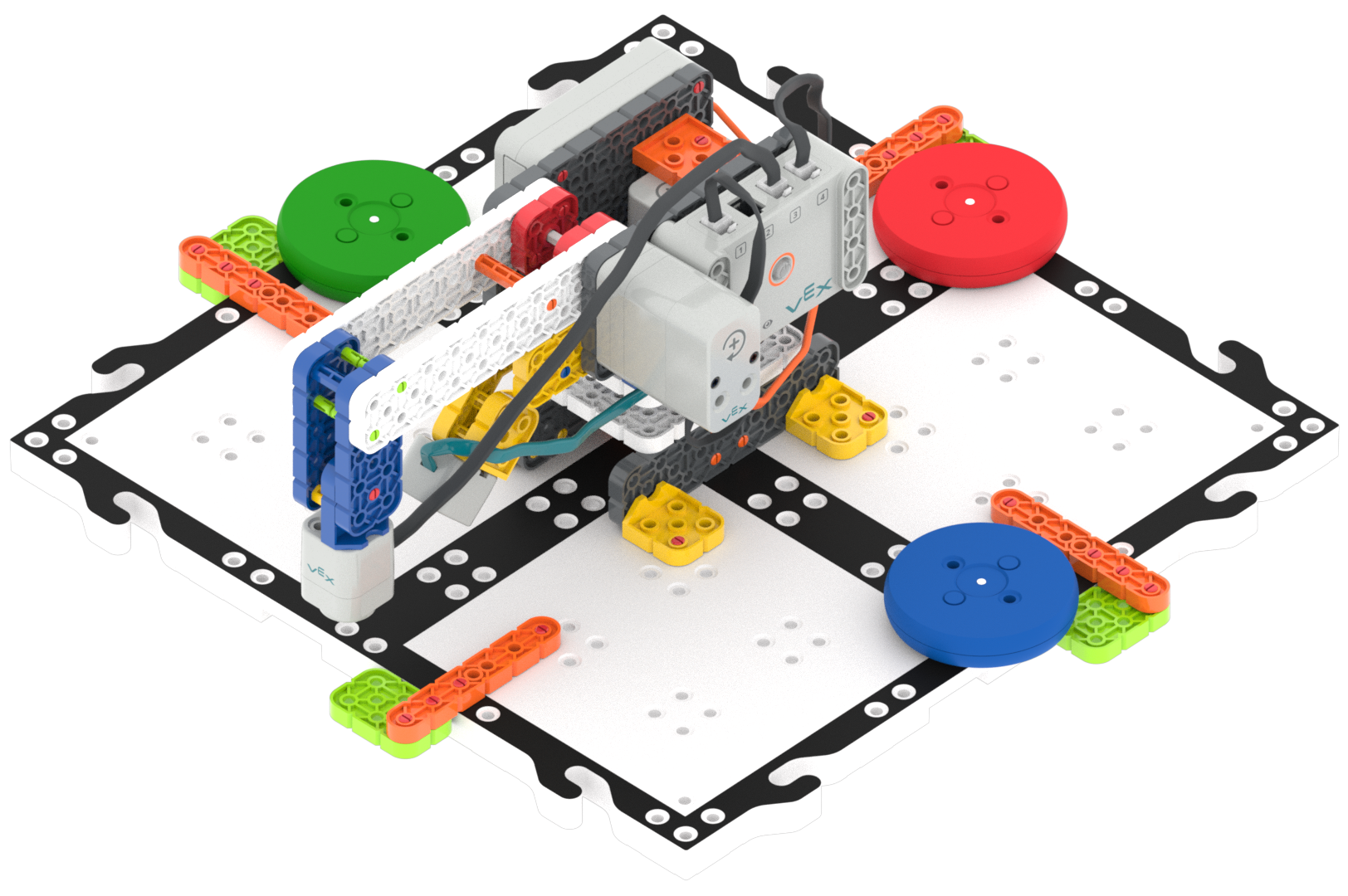
- سوف يحتاجون إلى التأكد من أن لديهم المواد اللازمة، وأن كل شيء مشحون، وأن ذراع الروبوت الكودي (ثنائي المحور) مبني بشكل صحيح.
- اطلب من الطلاب الإشارة بإبهامهم إلى المعلم عندما تكون مجموعتهم جاهزة للبدء! سوف تكون هناك حاجة إلى بناء ذراع الروبوت الكودي (ثنائي المحور) إذا لم يتم بناؤه بالفعل.
-
قم بتوزيعقم بتوزيع
من إصدارات Code Robot Arm (2-Axis) وجهاز للوصول إلى VEXcode GO لكل مجموعة. أو قم بتوزيع
تعليمات البناء واطلب من الطلاب بناء ذراع الروبوت البرمجية (ثنائي المحور) إذا لم يتم بناؤها
بعد.
كود ذراع الروبوت (محورين) -
تسهيلتسهيل
إعداد المجموعات لأقسام اللعب من خلال إرشادهم خلال الخطوات للتحقق من المواد الخاصة بهم.
- Is the Battery charged?
- هل تم بناء ذراع الروبوت الكودي (ثنائي المحور) بشكل صحيح ولا يفتقد أي قطعة؟
- هل تم توصيل جميع الكابلات بالمنافذ الصحيحة؟
- قم بتشغيل VEXcode GO على جهازك.
- عرضعرض دعم للمجموعات التي تحتاج إلى مساعدة في إطلاق VEXcode GO أو إعداد Robot Arm الخاص بها.

استكشاف أخطاء المعلم وإصلاحها
- قم بتحديث البرامج الثابتة الخاصة بك وتحقق من البطاريات الخاصة بك - قبل ذ لك في بداية المختبر، قد يكون من المفيد التحقق من أدمغتك fأو معظم ما يصل إلى تاريخ البرامج الثابتة باستخدام تطبيق الفصل الدراسي, وكذلك الخاص بك GO البطاريات, للتأكد من أن هذه المكونات على استعداد للذهاب. قم بتوصيل البطاريات الخاصة بك للشحن أثناء الليل، أو أول شيء في الصباح، للتأكد من أنها جاهزة للاستخدام في المختبر.
- لن تكون دورات الذراع الروبوتية دقيقة بنسبة 100% - قد يضع الذراع الروبوتي القرص في المكان الخطأ في بعض الأحيان. لن تدور القاعدة بالضبط 90 أو 180 درجة. تمامًا كما أن البشر ليسوا على صواب بنسبة 100% من الوقت، فإن الإصدارات لن تكون صحيحة بنسبة 100% من الوقت. يمكن أن تكون هذه لحظة تعليمية. يمكن أن يكون التحقيق أو المناقشة حول كيفية تحسين الطلاب لذراع الروبوت نشاطًا توسعيًا رائعًا!
- إصلاح مستشعر العين - في بعض الأحيان، يكتشف مستشعر العين المغناطيس الكهربائي بدلاً من القرص. في هذه الحالة، قد لا يتمكن المشروع من التمييز بين القرص الأزرق والأخضر. حاول إضافة كتلة [انتظار] بعد أن يكتشف مستشعر العين القرص لأول مرة لحل هذه المشكلة.
استراتيجيات التيسير
- فكر في دور الباني باعتباره المبرمج - إذا كان طلابك يعملون بأذرع روبوتية مبنية مسبقًا من المختبر السابق، فقد لا يكون هناك الكثير من "البناء" للقيام به. شجع الطلاب على التفكير في دور "المنشئ" باعتباره "مبرمجًا". اقترح تقسيم المسؤوليات لإنشاء الكود في VEXcode GO من خلال تشغيل الجزء 1 والجزء 2.
- الشرط مقابل الشرطية - إذا كان الطلاب يواجهون صعوبة في فهم الفرق، فاستخدم
العبارات المحادثة لمساعدتهم. الشرط هو عبارة عن جملة صحيحة/خاطئة، والجمل الشرطية تخبرنا بما
يجب فعله بالمعلومات الموجودة في جملة صحيحة/خاطئة. على سبيل المثال: عند اتخاذ قرار مثل: هل
أحتاج إلى مظلة اليوم؟ تخبرك الحالة بالمعلومات الحسية (مطر/لا مطر)، وتخبرك الشرطية بالعمل
الذي يصاحبها (خذ المظلة/اترك المظلة).
- الحالة: ممطر.
- شرطي: إذا كان الجو ممطرًا، فأنا آخذ معي مظلة.
- تذكر حلقة الأبد - إذا واجه الطلاب صعوبة في اللعب الجزء 2، فذكّرهم بالتحقق من أنهم يضيفون مكعباتهم داخل [الأبد] C. إذا كانت الكتل الجديدة خارج الحلقة، فسيتم فحصها مرة واحدة فقط، ولن يعمل المشروع بالشكل الذي يقصده الطلاب.
- رسم خريطة لنصف قطر الدوران - قد يواجه الطلاب صعوبة في تصور أو ترميز ذراع الروبوت الخاصة بهم بدقة للتحرك إلى مواقع منفصلة مع كل قرص ملون. شجع الطلاب على الرسم أو تتبع البلاط بأصابعهم أو تحريك أذرعهم، بالدرجات والاتجاه الذي يستخدمونه في كتلة [الدوران]، لمساعدتهم على رؤية المكان الذي سيتوقف فيه ذراع الروبوت عن الحركة ويسقط القرص.