
تنافس
الآن بعد أن تعلمت كيفية تحريك الروبوت الخاص بك باستخدام عناصر تحكم السائق، واختبرت تكوينات مختلفة للتحكم في السائق، فأنت جاهز لتحدي مكدس السرعة.
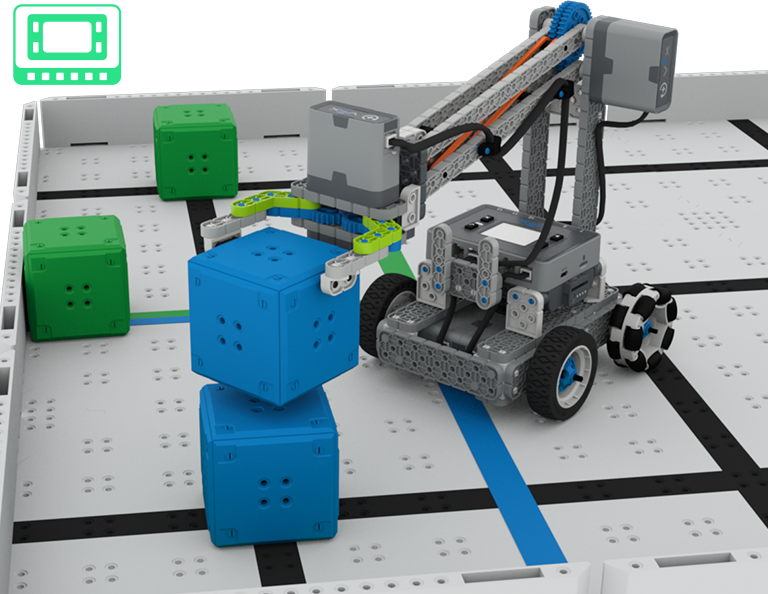
الهدف من هذا التحدي هو دفع الروبوت الخاص بك لتسجيل مكعبين في مناطق التسجيل المطابقة (عن طريق تكديس أحدهما ودفع الآخر إلى منطقة التسجيل) في أسرع وقت ممكن. توضح الرسوم المتحركة أدناه كيفية إعداد الحقل، وإحدى الطرق الممكنة لقيادة المكعبين وتسجيلهما. الروبوت الذي يسجل كلا المكعبين بشكل صحيح يفوز أسرع.
اتبع الخطوات الواردة في هذا المستند لإكمال تحدي Speed Stack.
Google Doc / .docx / .pdf
بمجرد الانتهاء من تحدي مكدس السرعة، تحقق مع معلمك. تأكد من توثيق نتائج التحدي في دفتر ملاحظاتك الهندسية.
التأمل الختامي
الآن بعد أن أنشأت استراتيجية وتنافست في تحدي Speed Stack، حان الوقت للتفكير فيما تعلمته وفعلته في هذا الدرس. ابدأ صفحة جديدة في دفتر ملاحظاتك الهندسي لبدء تفكيرك.
صنف نفسك كمبتدئ أو متدرب أو خبير في كل من المفاهيم التالية في دفتر ملاحظاتك الهندسية. قدم شرحًا موجزًا لسبب منحك لنفسك هذا التقييم لكل مفهوم:
- كيفية تخصيص برنامج التحكم بالسائق لتلبية احتياجاتي ومهاراتي في القيادة على أفضل وجه
- اختيار تكوين التحكم في السائق الذي يسمح لي باستخدام المخلب والذراع بكفاءة لتسجيل المكعبات
- التعاون مع فريقي لتطوير استراتيجية قيادة لتسجيل المكعبات بسرعة أكبر
استخدم هذا الجدول لمساعدتك في تحديد الفئة التي تندرج تحتها.
| خبير | أشعر أنني فهمت المفهوم تمامًا ويمكنني تعليم هذا لشخص آخر. |
| متدرب | أشعر أنني فهمت المفهوم بما يكفي للتنافس في التحدي. |
| مبتدئ | أشعر أنني لم أفهم المفهوم ولا أعرف كيفية إكمال التحدي. |
ما هي الخطوة التالية ؟
في هذا الدرس، تعرفت على استخدام عناصر تحكم السائق لتحريك الروبوت الخاص بك لالتقاط المكعبات وتسجيلها بشكل أكثر فعالية. ثم شاركت في تحدي Speed Stack. في الدرس التالي، سوف:
- تعرف على ترميز الحركات المستقلة
- خطط لمسار ورمز الروبوت الخاص بك للتحرك بشكل مستقل
- تنافس في تحدي الترميز للمكعبات!
اختر < العودة إلى الدروس للعودة إلى نظرة عامة على الدرس.
حدد الدرس التالي للمتابعة > إلى الدرس 3 والتعرف على ترميز الحركات المستقلة.