
Soutěž
Nyní, když jste se dozvěděli o pohybu robota s ovládáním řidiče a otestovali různé konfigurace ovládání řidiče, jste připraveni na Speed Stack Challenge.
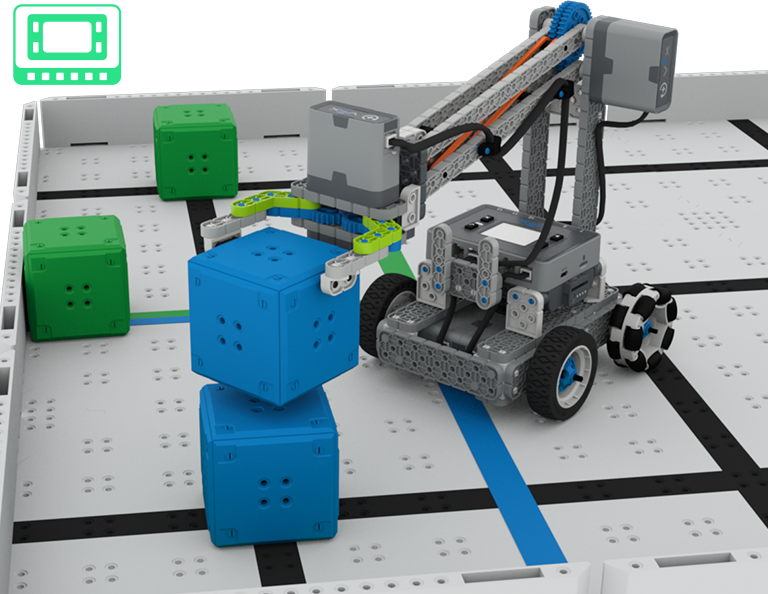
Cílem této výzvy je přimět vašeho robota vstřelit dvě kostky v odpovídajících bodovacích zónách (stohováním jedné a zatlačením druhé do bodovací zóny) v co nejrychlejším čase. Níže uvedená animace ukazuje, jak by mělo být pole nastaveno, a jeden z možných způsobů, jak řídit a skórovat obě kostky. Robot, který správně ohodnotí obě kostky, vyhrává.
Pro dokončení výzvy Speed Stack Challenge postupujte podle kroků v tomto dokumentu.
Google Doc / .docx / .pdf
Po dokončení výzvy Speed Stack Challenge se obraťte na svého učitele. Ujistěte se, že jste zdokumentovali výsledky výzvy ve svém technickém notebooku.
Zabalit odraz
Nyní, když jste vytvořili strategii a soutěžili v soutěži Speed Stack Challenge, je čas zamyslet se nad tím, co jste se v této lekci naučili a udělali. Začněte novou stránku ve svém technickém poznámkovém bloku a začněte přemýšlet.
Ohodnoťte se jako nováček, učeň nebo odborník na každý z následujících konceptů ve vašem technickém notebooku. Uveďte stručné vysvětlení, proč jste si pro každý koncept dali toto hodnocení:
- Jak přizpůsobit program Řízení řidičů tak, aby co nejlépe vyhovoval mým řidičským potřebám a dovednostem
- Volba konfigurace řízení ovladače, která mi umožňuje efektivně používat dráp a rameno ke skórování kostek
- Spolupráce s mým týmem na vývoji strategie řízení pro rychlejší získávání kostek
Pomocí této tabulky můžete určit, do které kategorie spadáte.
| Expert | Mám pocit, že jsem plně pochopil koncept a mohl bych to naučit někoho jiného. |
| Učeň | Mám pocit, že jsem konceptu rozuměl natolik, abych mohl soutěžit v soutěži. |
| Nováček | Mám pocit, že jsem konceptu nerozuměl a nevím, jak úkol splnit. |
Co bude dál?
V této lekci jste se dozvěděli o používání ovládacích prvků řidiče k přesunu robota, abyste mohli efektivněji zvedat a skórovat kostky. Poté jste soutěžili v soutěži Speed Stack Challenge. V příští lekci budete:
- Zjistěte více o kódování autonomních pohybů
- Naplánujte cestu a nakódujte robota tak, aby se pohyboval autonomně
- Soutěžte v soutěži Coding for Cubes Challenge!
Pro < návrat do přehledu lekcí zvolte Návrat k lekcím.
Vyberte Další lekce a pokračujte > na lekci 3 a dozvíte se o kódování autonomních pohybů.