
경쟁
이제 드라이버 컨트롤을 사용하여 로봇을 움직이는 방법에 대해 배우고 다양한 드라이버 컨트롤 구성을 테스트했으므로 스피드 스택 챌린지에 참여할 준비가 되었습니다.
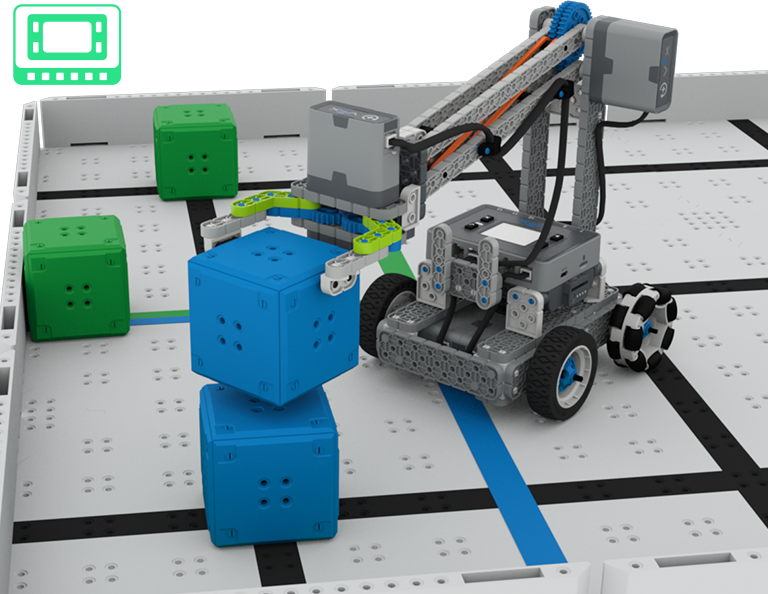
이 챌린지의 목표는 로봇이 가장 빠른 시간 내에 일치하는 득점 영역 (하나를 쌓고 다른 하나를 득점 영역으로 밀어 넣음) 에서 두 개의 큐브를 득점하도록 유도하는 것입니다. 아래 애니메이션은 필드를 설정하는 방법과 두 큐브를 모두 운전하고 점수를 매기는 한 가지 방법을 보여줍니다. 두 큐브를 모두 정확하게 득점하는 로봇이 가장 빨리 승리합니다.
애니메이션에서는 비디오 상단에 컨트롤러 아이콘과 함께 스톱워치가 표시됩니다. 클로봇은 큐브 수집장 오른쪽 벽의 중앙에서 시작하여, 중앙을 마주보고 있으며, 그 앞에 교차하는 필드 선 위에 녹색과 파란색 큐브가 배치되어 있습니다. 카운트다운이 끝나면 스톱워치가 작동하고 클로봇이 앞으로 나아가면서 녹색 큐브를 녹색 점수 영역으로 밀어 넣습니다. 발톱으로 파란색 큐브를 집어 들고, 파란색 득점 구역에 있는 파란색 큐브 위에 쌓습니다.
이 문서의 단계에 따라 Speed Stack Challenge를 완료하세요.
Google Doc / .docx / .pdf
스피드 스택 챌린지를 완료한 후 교사에게 문의하세요. 챌린지 결과를 엔지니어링 노트에 기록했는지 확인하십시오.
마무리 성찰
전략을 세우고 스피드 스택 챌린지에 참가했으니 이제 이 수업에서 배우고 수행한 내용을 되돌아볼 차례입니다. 엔지니어링 노트에서 새 페이지를 시작하여 성찰을 시작하십시오.
엔지니어링 노트의 다음 각 개념에 대해 초보자, 견습생 또는 전문가로 평가하십시오. 각 개념에 대해 평점을 매긴 이유에 대한 간략한 설명을 제공합니다.
- 운전자의 니즈와 기술에 가장 잘 부합하도록 운전자 제어 프로그램을 맞춤 설정하는 방법
- 발톱과 팔을 효율적으로 사용하여 큐브를 채점할 수 있는 드라이버 제어 구성 선택
- 팀과 협력하여 큐브에 더 빠르게 점수를 매길 수 있는 추진 전략 개발
이 표를 사용하여 어떤 카테고리에 속하는지 결정할 수 있습니다.
| 전문가 | 나는 개념을 완전히 이해했고 이것을 다른 사람에게 가르칠 수 있다고 느낀다. |
| 견습생 | 챌린지에 출전할 수 있을 만큼 개념을 이해했다고 느낀다. |
| 초심자 | 개념을 이해하지 못했고 도전을 완료하는 방법을 모른다고 느낍니다. |
다음 단계는 무엇인가요?
이 강의에서는 드라이버 파트너 컨트롤을 사용하여 로봇을 움직여 큐브를 더 효과적으로 픽업하고 점수를 매기는 방법을 배웠습니다. 그런 다음 스피드 스택 챌린지에 출전했습니다. 다음 레슨에서 학습할 내용은 다음과 같습니다.
- 자율 이동 코딩에 대해 알아보기
- 경로를 계획하고 로봇이 자율적으로 움직이도록 코딩하세요
- 큐브를 위한 코딩 챌린지에서 경쟁하세요!
수업으로 < 돌아가기 를 선택하여 수업 개요로 돌아갑니다.
다음 레슨을 > 선택하여 레슨 3을 계속하고 자율 이동 코딩에 대해 배웁니다.