
竞争
现在您已经了解了如何使用驱动器控制来移动机器人,并测试了不同的驱动器控制配置,您已经准备好迎接速度堆栈挑战了。
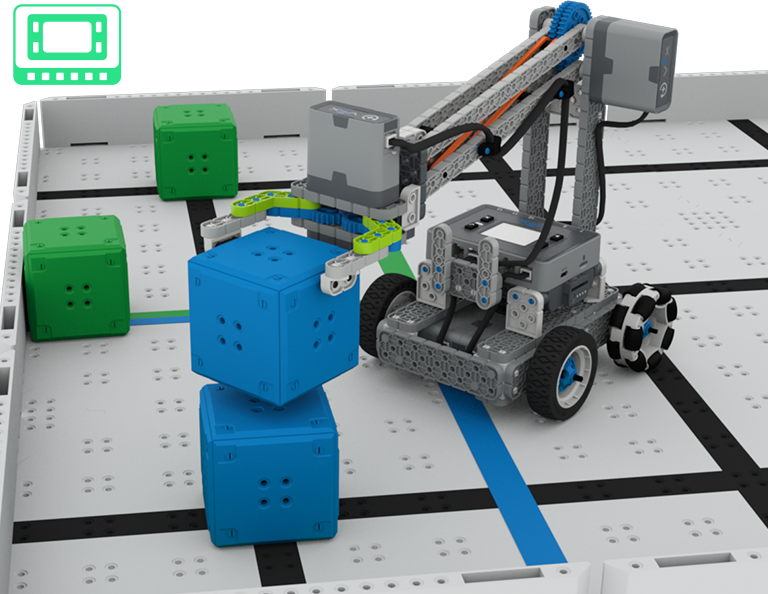
此挑战的目标是驾驶您的机器人在尽可能快的时间内在匹配的得分区域中对两个立方体进行得分(通过堆叠一个立方体并将另一个推入得分区域)。 下面的动画显示了如何设置场地,以及驱动和得分两个立方体的一种可能方法。 最快正确得分两个方块的机器人获胜。 按照本文档中的步骤完成 Speed Stack 挑战。
完成 Speed Stack 挑战后,请与您的老师联系。 确保您已在工程笔记本中记录了挑战的结果。
视频文件
总结反思
现在您已经制定了策略并参加了 Speed Stack 挑战赛,现在是时候反思一下您在本课程中所学和所做的事情了。 在你的工程笔记本中开始一个新的页面来开始你的反思。
对于工程笔记本中的以下每个概念,将自己评价为新手、学徒或专家。 简要解释一下您为何对每个概念给予自己这样的评级:
- 如何定制驾驶员控制程序以最好地满足我的驾驶需求和技能
- 选择一个驱动器控制配置,使我能够有效地使用爪子和手臂来切割立方体
- 与我的团队合作制定驱动策略以更快地得分立方体
使用此表可以帮助您确定您属于哪个类别。
|
专家 |
我觉得我完全理解了这个概念,并且可以将其教给其他人。 |
| 学徒 | 我觉得我对这个概念的理解足以参加挑战。 |
| 新手 | 我觉得我不明白这个概念,不知道如何完成挑战。 |
下一步是什么?
在本课程中,您学习了如何使用驾驶员控件来移动机器人,以更有效地拾取立方体并对其进行评分。 然后您参加了 Speed Stack 挑战赛。 在下一课中,您将:
- 了解如何对自主运动进行编码
- 规划路径并对机器人进行编码以使其自主移动
- 参加立方体编码挑战赛!
选择 < 返回第 课以返回课程概述。
选择 Next Lesson > 继续学习 Lesson 3 并了解如何对自主运动进行编码。