
الانعطاف بسرعات مختلفة
بعد ذلك، أدر الطيار الآلي بسرعات مختلفة!
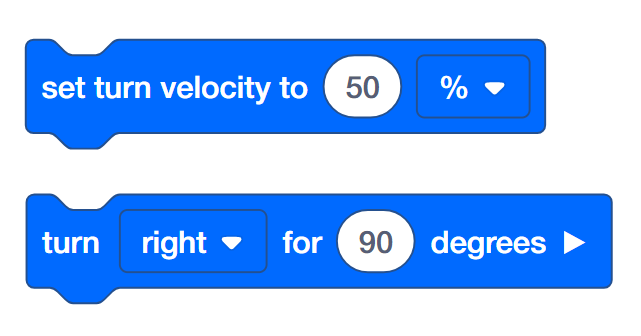
يعد ضبط سرعة القيادة وتعيين سرعة الدوران كتلتين منفصلتين. هذا مفيد عندما تريد أن يقود الروبوت
بسرعة معينة ولكن ينعطف بسرعة مختلفة. في منافسة موقوتة على سبيل المثال، قد يقود الروبوت بسرعة
كبيرة حول الملعب ولكنه يستدير ببطء وبعناية أكبر.
أضف المكوّنات التالية إلى سرعات
القيادة:
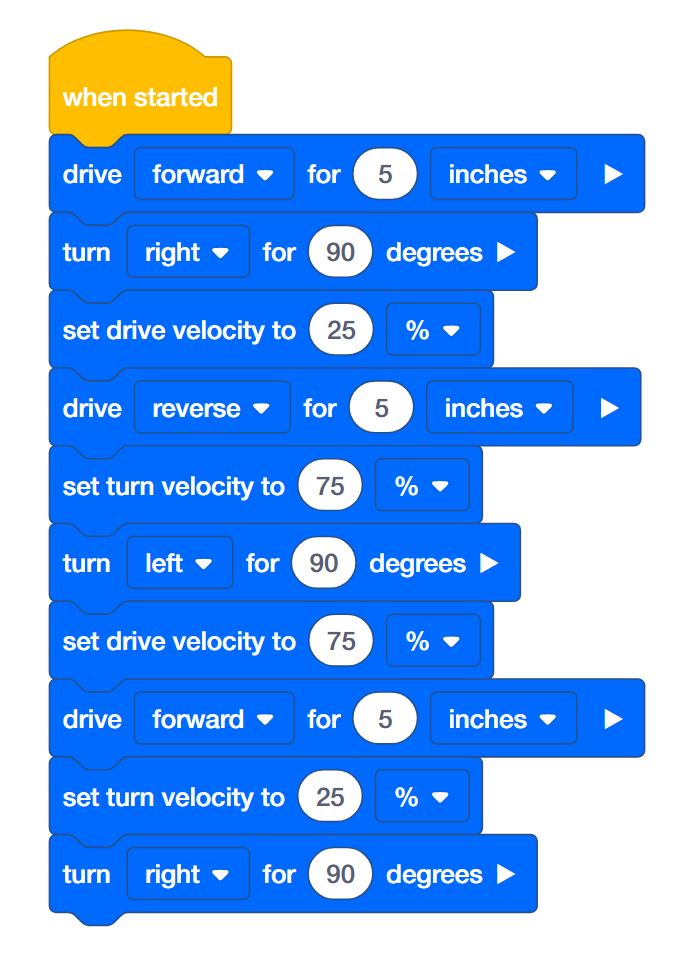
- يجب على المبرمج إضافة هذه الكتل إلى مشروعك ثم تنزيلها إلى الطيار الآلي.
- يجب على السائق بعد ذلك تشغيل المشروع.
- لاحظ كيف تقارن سرعات الدوران ببعضها البعض. لاحظ أيضًا مدى اختلافها عن سرعات القيادة.
- يجب أن تناقش مجموعتك ملاحظاتك ويجب على المسجل كتابتها في دفتر ملاحظاتك الهندسية.
![]() قم بتوسيع نطاق تعلمك
-
النسب المئوية والكسور والأعداد & العشرية
قم بتوسيع نطاق تعلمك
-
النسب المئوية والكسور والأعداد & العشرية
حتى الآن، يستخدم الطلاب النسب المئوية لكتل [set drive velocity] و [set turn velocity]. انقر على أحد الروابط التالية (Google Doc/.docx/.pdf) للحصول على معلومات حول كيفية توجيه طلابك لتحويل النسب المئوية إلى كسور وكسور عشرية.
![]() نصائح المعلم
- السلوكيات
الإيجابية
نصائح المعلم
- السلوكيات
الإيجابية
أنشئ قائمة بالسلوكيات المحددة التي تريد تشجيعها. يمكن أن تشمل الأمثلة ما يلي:
-
يقوم الطلاب بالتنظيم الذاتي مع الأدوار داخل المجموعة
-
يؤدي الطلاب كل دور من أدوارهم بشكل جيد داخل المجموعة
-
يتعامل الطلاب مع الروبوت وأجهزة الكمبيوتر/الأجهزة اللوحية بعناية
-
الطلاب يمدحون ويشجعون بعضهم البعض أثناء الاستكشاف
عندما يستخدم الطلاب هذه السلوكيات، امدحهم على الفور. كن محددًا عند تقديم الثناء. على سبيل المثال، بدلاً من قول "عمل جيد"، يمكنك بدلاً من ذلك قول "عمل جيد بإرجاع الروبوت الآلي بعناية إلى المكان الصحيح".