
การหมุนที่ความเร็วต่างกัน
จากนั้นหมุน Autopilot ด้วยความเร็วที่แตกต่างกัน!
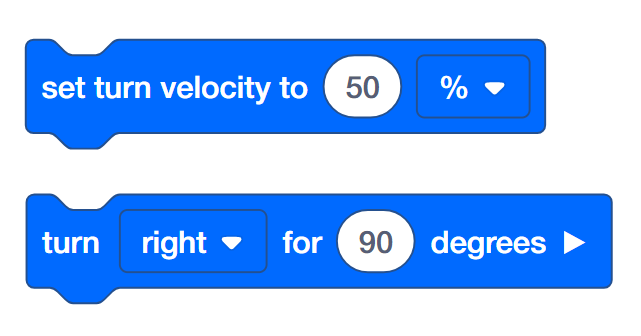
การตั้งค่าความเร็วสำหรับการขับขี่และการตั้งค่าความเร็วสำหรับการเลี้ยวเป็นสองบล็อกแยกกัน
ซึ่งจะเป็นประโยชน์เมื่อคุณต้องการให้หุ่นยนต์ขับด้วยความเร็วที่แน่นอนแต่เลี้ยวที่ความเร็วอื่น
ตัวอย่างเช่นในการแข่งขันแบบจับเวลาหุ่นยนต์อาจขับรถไปรอบๆสนามอย่างรวดเร็วแต่หันไปอย่างช้าๆและระมัดระวังมากขึ้น
เพิ่มบล็อกต่อไปนี้ใน
Drive Velocities ของคุณ:
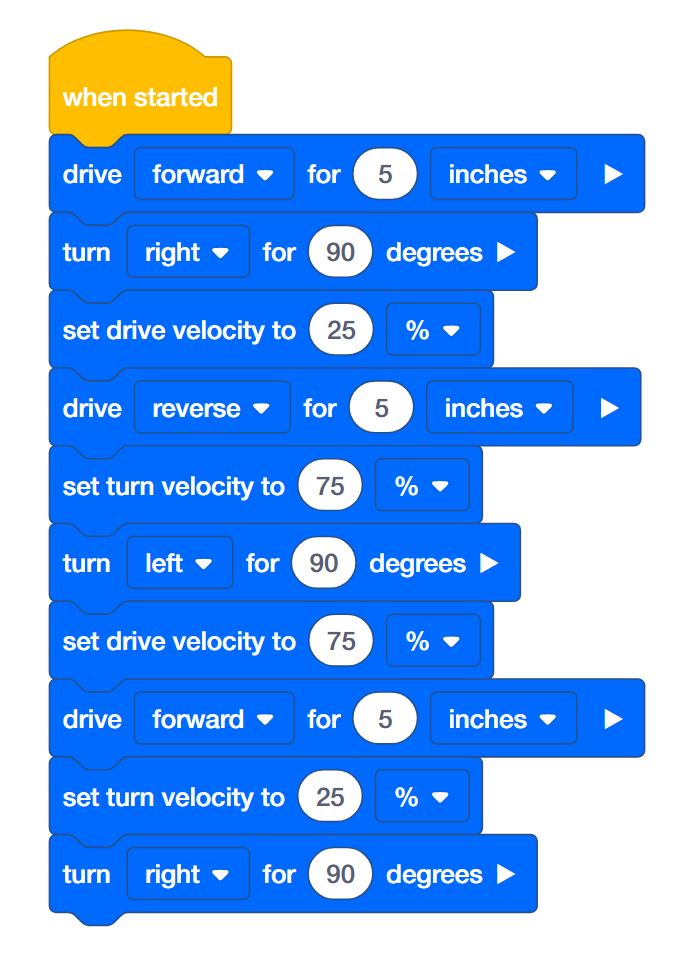
- โปรแกรมเมอร์ควรเพิ่มบล็อกเหล่านี้ลงในโปรเจกต์ของคุณแล้วดาวน์โหลดลงใน Autopilot ของคุณ
- จากนั้นผู้ขับควรดำเนินโครงการ
- สังเกตว่าความเร็วในการหมุนเปรียบเทียบกันอย่างไร นอกจากนี้ให้สังเกตว่าพวกเขาแตกต่างจากความเร็วในการขับขี่อย่างไร
- กลุ่มของคุณควรหารือเกี่ยวกับการสังเกตของคุณและผู้บันทึกควรเขียนลงในสมุดบันทึกวิศวกรรมของคุณ
![]() ขยายการเรียนรู้ของท่าน
-
เปอร์เซ็นต์เศษส่วน & ทศนิยม
ขยายการเรียนรู้ของท่าน
-
เปอร์เซ็นต์เศษส่วน & ทศนิยม
จนถึงขณะนี้นักเรียนได้ใช้เปอร์เซ็นต์สำหรับบล็อก [set drive velocity] และ [set turn velocity] คลิกหนึ่งในลิงก์ต่อไปนี้(GoogleDoc/.docx /.pdf) เพื่อดูข้อมูลเกี่ยวกับวิธีแนะนำให้นักเรียนแปลงเปอร์เซ็นต์เป็นเศษส่วนและทศนิยม
![]() เคล็ดลับสำหรับครู
- พฤติกรรม
เชิงบวก
เคล็ดลับสำหรับครู
- พฤติกรรม
เชิงบวก
สร้างรายการพฤติกรรมเฉพาะที่คุณต้องการส่งเสริม ตัวอย่างอาจรวมถึง:
-
นักเรียนจัดระเบียบตนเองด้วยบทบาทภายในกลุ่ม
-
นักเรียนปฏิบัติหน้าที่แต่ละอย่างได้ดีภายในกลุ่ม
-
นักเรียนที่ใช้หุ่นยนต์และคอมพิวเตอร์/แท็บเล็ตด้วยความระมัดระวัง
-
นักเรียนยกย่องและให้กำลังใจกันระหว่างการสำรวจ
เมื่อนักเรียนใช้พฤติกรรมเหล่านี้ให้ชื่นชมพวกเขาทันที ระบุให้ชัดเจนเมื่อกล่าวคำสรรเสริญ ตัวอย่างเช่นแทนที่จะพูดว่า “เก่งมาก” คุณสามารถพูดแทนได้ว่า “เก่งมากที่ส่งหุ่นยนต์ Autopilot กลับไปยังจุดที่ถูกต้อง”