
Seuraavaksi käännä Autopilottia eri nopeuksilla!
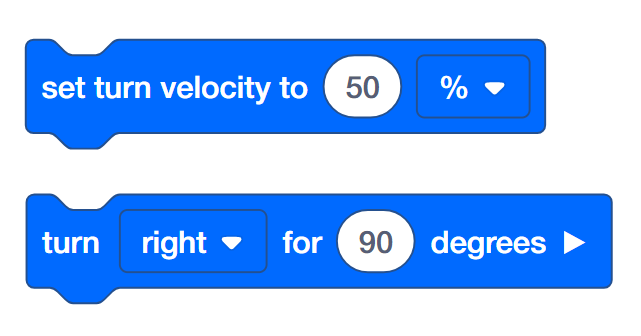
Ajonopeuden asettaminen ja kääntymisen nopeuden asettaminen ovat kaksi erillistä lohkoa. Tästä on apua, kun haluat robotin ajavan tietyllä nopeudella mutta kääntyvän eri nopeudella. Esimerkiksi ajoitetussa kilpailussa robotti saattaa ajaa hyvin nopeasti kentän ympäri, mutta kääntyä hitaammin ja varovaisemmin.
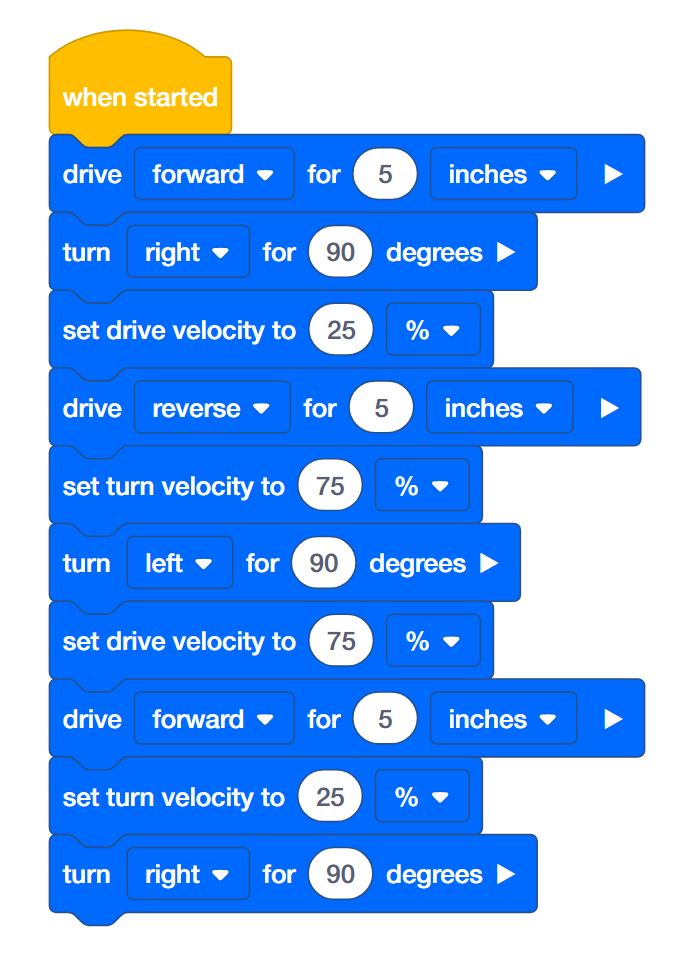
Lisää seuraavat lohkot aseman nopeuksiin:
-
Ohjelmoijan tulee lisätä nämä lohkot projektiisi ja ladata ne sitten Autopilottiin.
-
Kuljettajan tulee sitten suorittaa projekti.
-
Huomaa kuinka kääntönopeudet verrataan toisiinsa. Huomaa myös, kuinka ne eroavat ajonopeudesta.
-
Ryhmäsi tulee keskustella havainnoistasi ja tallentajan tulee kirjoittaa ne suunnittelumuistikirjaasi.
![]() Laajenna oppimistasi
-
prosentilla, murtoluvuilla, & desimaalilla
Laajenna oppimistasi
-
prosentilla, murtoluvuilla, & desimaalilla
Toistaiseksi opiskelijat ovat käyttäneet prosentteja [set drive speed]- ja [set turn speed] -lohkoille. Napsauta jotakin seuraavista linkeistä (Google Doc/.docx/.pdf) saadaksesi tietoja siitä, kuinka voit ohjata oppilaita muuttamaan prosenttiosuudet murto- ja desimaaliluvuiksi.
![]() Opettajan vinkit
-
positiivinen käyttäytyminen
Opettajan vinkit
-
positiivinen käyttäytyminen
Luo luettelo tietyistä käyttäytymismalleista, joita haluat rohkaista. Esimerkkejä voisivat olla:
-
Opiskelijat organisoivat itse roolinsa ryhmän sisällä
-
Oppilaat suorittavat jokaisen roolinsa hyvin ryhmässä
-
Opiskelijat, jotka käsittelevät robottia ja tietokoneita/tabletteja varovasti
-
Opiskelijat kehuvat ja kannustavat toisiaan tutkimusmatkan aikana
Kun oppilaat käyttävät näitä käyttäytymismalleja, kehu heitä välittömästi. Ole täsmällinen, kun annat kiitosta. Esimerkiksi sen sijaan, että sanoisit "hyvää työtä", voit sen sijaan sanoa: "hyvä työ palauttaa Autopilot-robotti huolellisesti oikeaan paikkaan".