![]() أدوات المعلم
-
مخطط النشاط
أدوات المعلم
-
مخطط النشاط
سيعرّف هذا الاستكشاف الطلاب على سلوكيات البرمجة الأساسية للدفع للأمام والخلف والانتظار. ستساعدهم هذه المهارات الأساسية على النجاح في النشاط التالي وفي تحدي الضربة في نهاية مختبر العلوم والتكنولوجيا والهندسة والرياضيات، حيث سيتنافسون في البولينج باستخدام Speedbot.
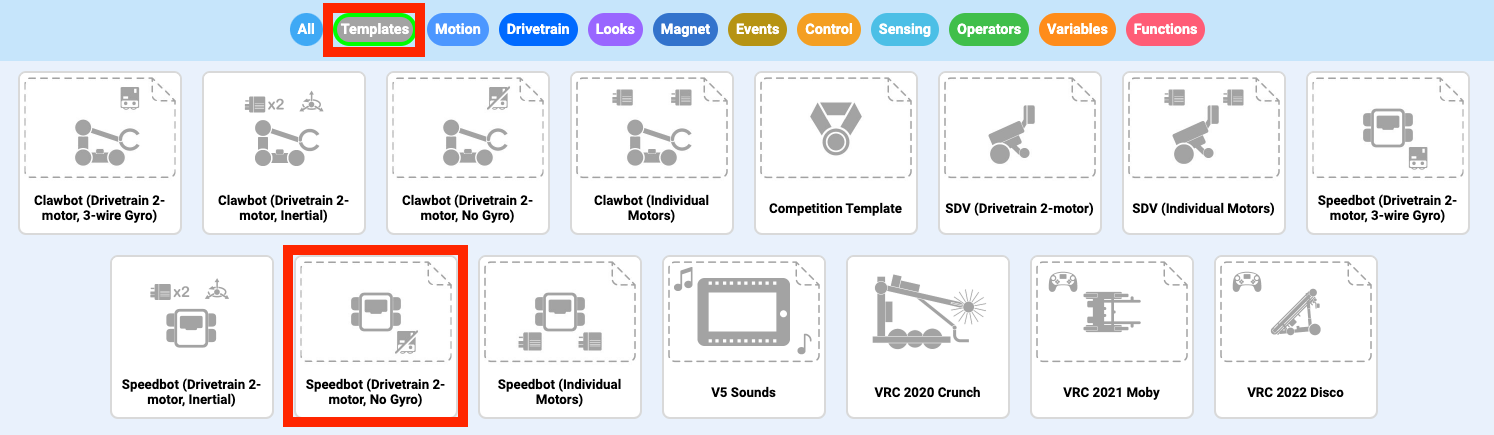
يتيح استخدام مشروع قالب V5 Speedbot (نظام الدفع ثنائي المحرك، بدون جيرو) للطلاب إمكانية برمجة Speedbot للمضي قدمًا باستخدام تعليمات واحدة فقط.
Speedbot جاهز للتحرك!
سيمنحك هذا الاستكشاف الأدوات اللازمة لتتمكن من برمجة Speedbot الخاص بك للقيام بحركات بسيطة. في نهاية هذا النشاط، ستشارك في تحدي تدريبات كرة السلة باستخدام سلوكيات الأمام والخلف والانتظار.
![]() صندوق أدوات المعلم
صندوق أدوات المعلم
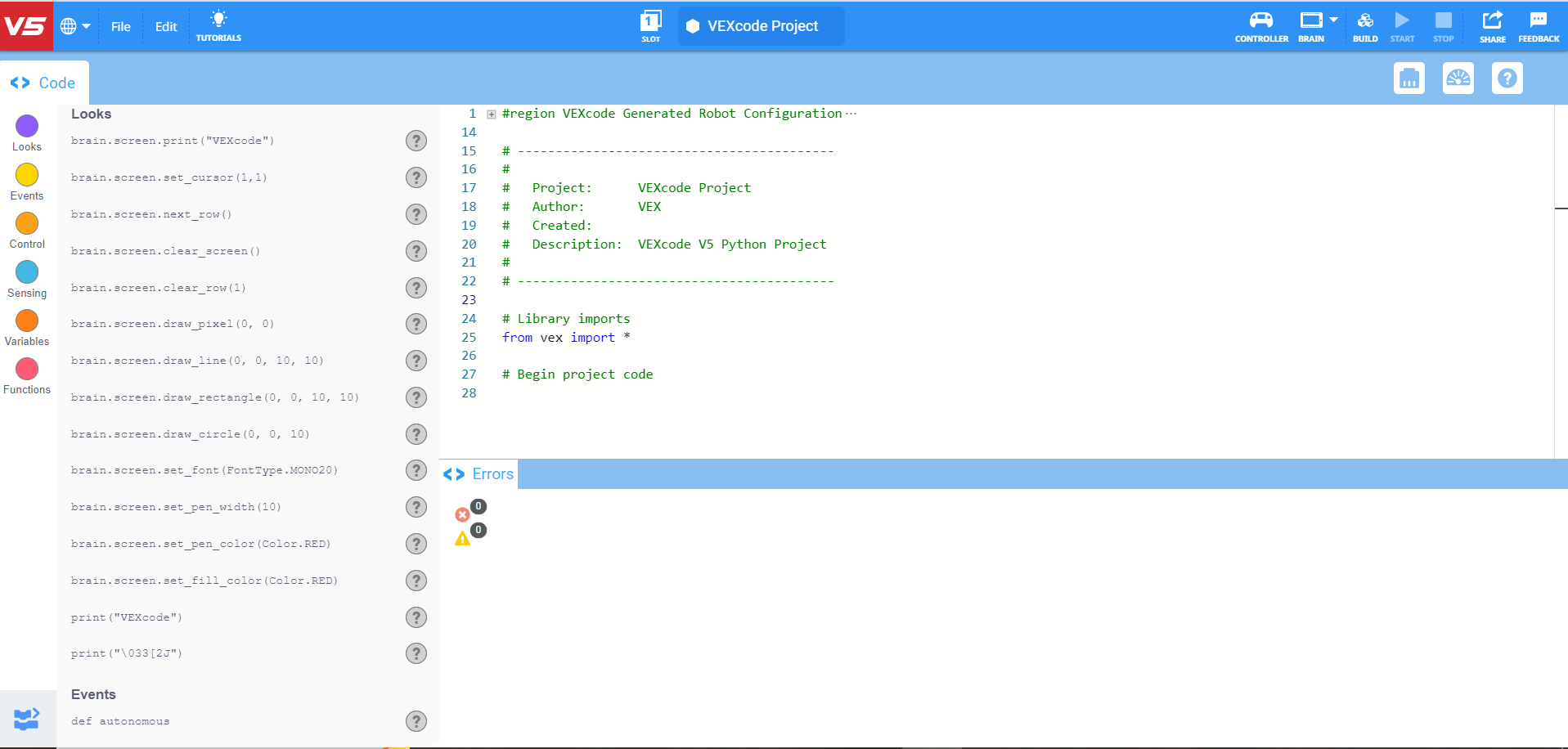
فيما يلي نظرة عامة على واجهة المستخدم الخاصة بـ VEXcode V5. سيتم تعريف الطلاب بعلامات التبويب/الأزرار هذه أثناء الأنشطة في مختبر Momentum Alley STEM. يتم توفير الروابط أيضًا في جميع أنحاء مختبر العلوم والتكنولوجيا والهندسة والرياضيات (STEM Lab) لتوفير المزيد من المعلومات حول علامات التبويب/الأزرار هذه.
-
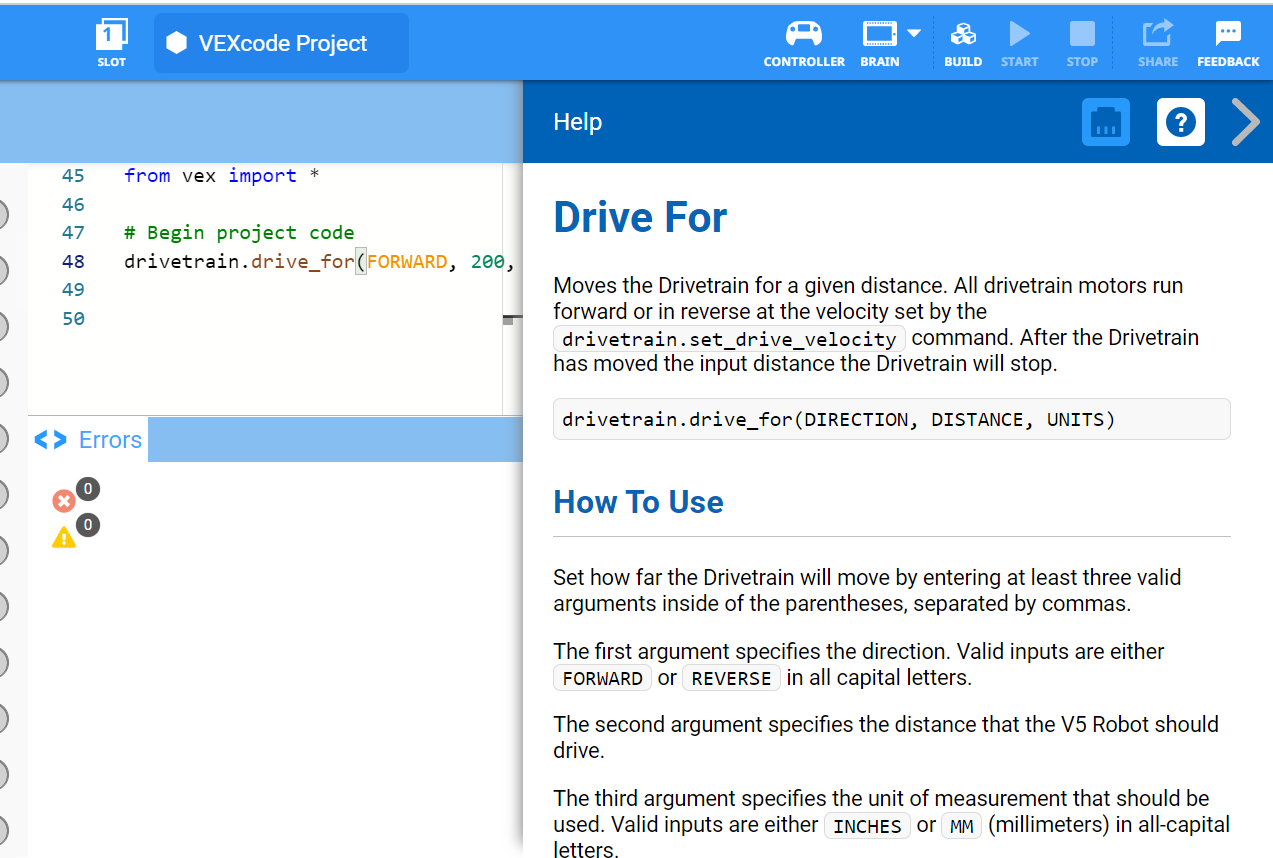
تعليمات VEXcode V5 Python التي سيتم استخدامها في هذا الاستكشاف:
-
Drivetrain.drive_for (إلى الأمام، 200، مم)
-
انتظر (1، ثانية)
-
-
لمعرفة المزيد من المعلومات حول التعليمات، حدد تعليمات، ثم حدد رمز علامة الاستفهام بجوار الأمر لرؤية المزيد من المعلومات.
-
تأكد من حصولك على الأجهزة المطلوبة، وتنزيل دفتر الملاحظات الهندسي الخاص بك، وتنزيل VEXcode V5 وجاهزيته.
![]() نصائح المعلم
نصائح المعلم
إذا كانت هذه هي المرة الأولى التي يستخدم فيها الطالب VEXcode V5، فيمكنه الرجوع إلى البرامج التعليمية في أي وقت أثناء هذا الاستكشاف.

| كمية | المواد المطلوبة |
|---|---|
| 1 |
روبوت سبيدبوت |
| 1 |
بطارية الروبوت المشحونة |
| 1 |
فيكس كود V5 |
| 1 |
كابل USB (في حالة استخدام جهاز كمبيوتر) |
| 1 |
دفتر الهندسة |
![]() نصائح المعلم
نصائح المعلم
قم بتصميم كل خطوة من خطوات استكشاف الأخطاء وإصلاحها للطلاب.
الخطوة 2: ابدأ مشروعًا جديدًا
أكمل الخطوات التالية لبدء المشروع:
-
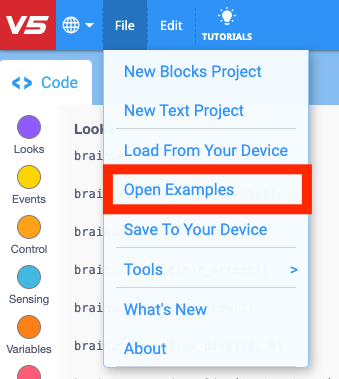
افتح قائمة "ملف" وحدد "فتح الأمثلة".
-
حدد مشروع قالب Speedbot (محرك الدفع ثنائي المحرك، بدون جيرو) وافتحه. يحتوي مشروع القالب على تكوين محرك Speedbot . إذا لم يتم استخدام القالب، فلن يقوم الروبوت الخاص بك بتشغيل المشروع بشكل صحيح.
-
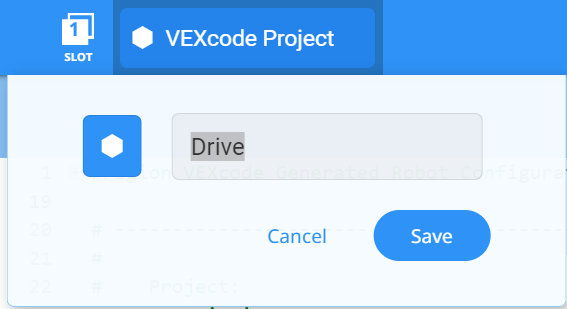
نظرًا لأنك ستعمل على تحريك Speedbot للأمام والخلف، فسوف تقوم بتسمية مشروعك Drive. حدد اسم المشروع، واكتب "Drive" ثم حدد "حفظ".
![]() نصائح المعلم
نصائح المعلم
-
يمكن أن تحتوي أسماء المشاريع على مسافات بين الكلمات أو بعدها.

-
يمكنك أن تطلب من الطلاب إضافة الأحرف الأولى من أسمائهم أو اسم مجموعتهم إلى اسم المشروع. سيساعد هذا في التمييز بين المشاريع إذا طلبت من الطلاب إرسالها.
-
نظرًا لأن هذا هو النشاط الأول للبرمجة الذي قد يحاول طلابك القيام به، فيجب عليك وضع نموذج للخطوات، ثم مطالبة الطلاب بإكمال نفس الإجراءات. ويجب على المعلم بعد ذلك مراقبة الطلاب للتأكد من أنهم يتبعون الخطوات بشكل صحيح.
-
تأكد من قيام الطلاب بتحديد "فتح الأمثلة" من القائمة "ملف".
-
تأكد من أن الطلاب قد اختاروا مشروع قالب Speedbot (نظام الدفع ثنائي المحرك، بدون جيرو).
-
يمكنك الإشارة للطلاب إلى وجود العديد من الاختيارات للاختيار من بينها في صفحة الأمثلة. أثناء قيامهم ببناء واستخدام الروبوتات الأخرى، سيكون لديهم فرصة لاستخدام قوالب مختلفة.
-
تحقق للتأكد من أن اسم المشروع Drive موجود الآن في النافذة الموجودة في منتصف شريط الأدوات.

![]() أدوات المعلم
-
إنقاذ المشاريع
أدوات المعلم
-
إنقاذ المشاريع
-
أشر إلى أنه عندما فتحوا VEXcode V5 لأول مرة، كانت النافذة تحمل اسم VEXcode Project. VEXcode Project هو اسم المشروع الافتراضي عند فتح VEXcode V5 لأول مرة. بمجرد إعادة تسمية المشروع إلى Drive وحفظه، تم تحديث الشاشة لإظهار اسم المشروع الجديد. باستخدام هذه النافذة في شريط الأدوات، من السهل التحقق من أن الطلاب يستخدمون المشروع الصحيح.
-
أخبر الطلاب أنهم الآن جاهزون لبدء مشروعهم الأول. اشرح للطلاب أنه من خلال اتباع بعض الخطوات البسيطة، سيتمكنون من إنشاء وتشغيل مشروع من شأنه أن يدفع Speedbot إلى الأمام.
-
ذكّر الطلاب بحفظ مشاريعهم أثناء عملهم. يشرح قسم Python من مكتبة VEX ممارسات الحفظ في VEXcode V5.
![]() أدوات المعلم
-
توقف وناقش
أدوات المعلم
-
توقف وناقش
تعد هذه نقطة جيدة للتوقف مؤقتًا واطلب من الطلاب مراجعة الخطوات التي تم إكمالها للتو عند بدء مشروع جديد في VEXcode V5 بشكل فردي أو في مجموعات. اطلب من الطلاب أن يفكروا بشكل فردي قبل المشاركة داخل مجموعتهم أو مع الفصل بأكمله.
الخطوة 3: قم بالقيادة للأمام
أنت الآن جاهز لبدء برمجة الروبوت للمضي قدمًا!
-
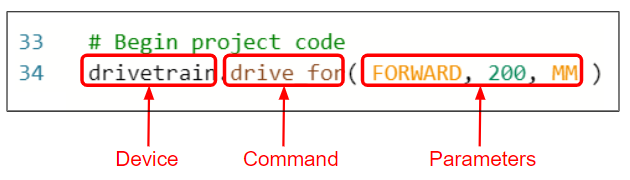
قبل أن نبدأ البرمجة، علينا أن نفهم ما هي التعليمات. هناك ثلاثة أجزاء للتعليمات. لمزيد من المعلومات حول تلوين التعليمات البرمجية في VEXcode V5 Python، شاهد هذه المقالة.
-
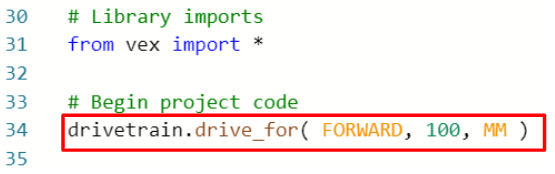
أضف التعليمات إلى المشروع:
![]() نصائح المعلم
نصائح المعلم
قد تلاحظ وظيفة الإكمال التلقائي عندما تبدأ في كتابة التعليمات. استخدم مفتاحي "أعلى" و"أسفل" لتحديد الاسم الذي تريده، ثم اضغط على "Tab" أو (Enter/Return) على لوحة المفاتيح لإجراء التحديد. لمزيد من المعلومات حول هذه الميزة راجع مقالة Python. 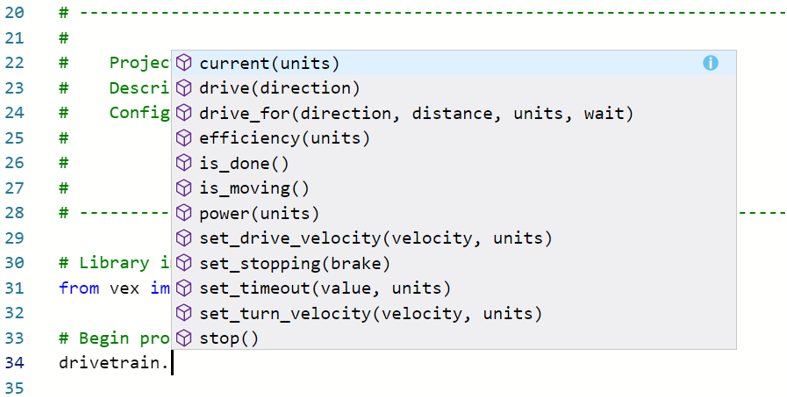
-
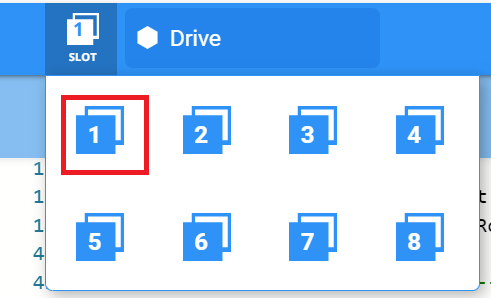
حدد أيقونة الفتحة لاختيار واحدة من الفتحات الثمانية المتوفرة في Robot Brain وحدد الفتحة 1.
-
قم بتوصيل V5 Robot Brain بالكمبيوتر باستخدام كابل USB صغير وقم بتشغيل V5 Robot Brain. يتحول رمز Brain الموجود في شريط الأدوات إلى اللون الأخضر بمجرد إجراء اتصال ناجح.

-
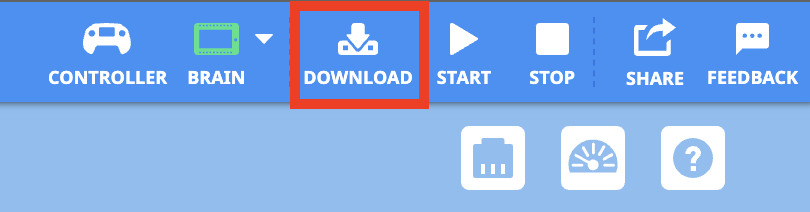
حدد تنزيل لتنزيل المشروع على الدماغ.

![]() صندوق أدوات المعلم
صندوق أدوات المعلم
ذكّر الطلاب بفصل كابل USB عن Robot Brain. قد يؤدي توصيل الروبوت بجهاز كمبيوتر أثناء تشغيل المشروع إلى قيام الروبوت بسحب كابل الاتصال.
![]() أدوات المعلم
-
توقف وناقش
أدوات المعلم
-
توقف وناقش
اطلب من الطلاب التنبؤ بما يعتقدون أنه سيحدث عند تنزيل هذا المشروع وتشغيله على Speedbot. اطلب من الطلاب أن يسجلوا توقعاتهم في دفاتر ملاحظاتهم الهندسية. إذا سمح الوقت، اطلب من كل مجموعة مشاركة تنبؤاتها.
![]() صندوق أدوات المعلم
-
النموذج الأول
صندوق أدوات المعلم
-
النموذج الأول
- قم بإنشاء نموذج لتشغيل المشروع أمام الفصل قبل أن يحاول جميع الطلاب في وقت واحد. اجمع الطلاب في منطقة واحدة واترك مساحة كافية لتحرك Speedbot إذا تم وضعه على الأرض.
- أخبر الطلاب أن دورهم قد حان الآن لتشغيل مشروعهم. تأكد من أن لديهم مسارًا واضحًا وأنه لن تصطدم أجهزة Speedbots ببعضها البعض.
-
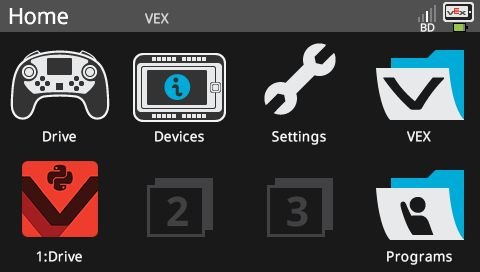
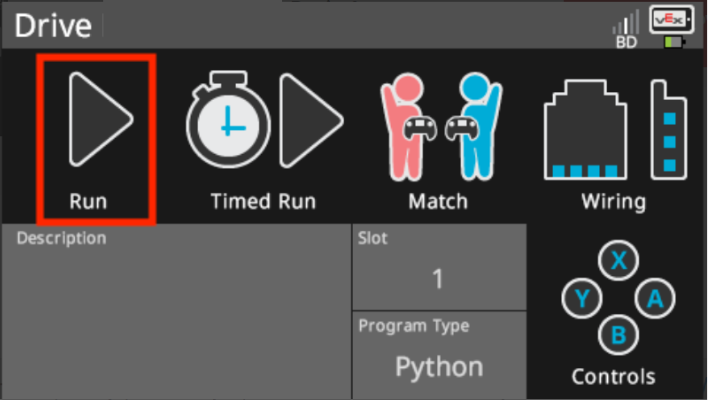
قم بتشغيل (Python) المشروع على الروبوت من خلال التأكد من تحديد المشروع ثم الضغط على الزر Run الموجود على Robot Brain. تهانينا على إنشاء مشروعك الأول!
الخطوة 4: القيادة للخلف
الآن بعد أن قمت ببرمجة الروبوت الخاص بك للقيادة للأمام، فلنبرمجه الآن للقيادة للخلف.
-
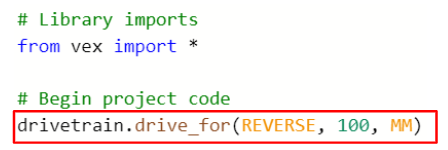
قم بتغيير المعلمة في تعليمات drive_for لعرض REVERSE بدلاً من FORWARD.
-
حدد اسم المشروع لتغييره من Drive إلى Reverse.

-
حدد أيقونة الفتحة لاختيار فتحة جديدة. حدد الفتحة 2.

-
قم بتنزيل (في Python) المشروع.
-
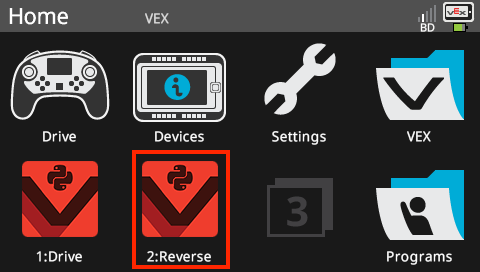
تحقق للتأكد من تنزيل مشروعك (في Python) من خلال النظر إلى شاشة Robot Brain. يجب إدراج اسم المشروع عكس في الفتحة 2.
-
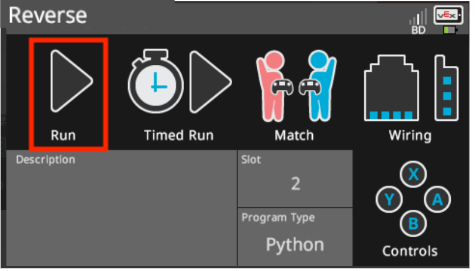
قم بتشغيل (في Python) المشروع على الروبوت من خلال التأكد من تحديد المشروع ثم اضغط على الزر Run الموجود على Robot Brain.
![]() أدوات المعلم
-
إكمال الخطوة 4
أدوات المعلم
-
إكمال الخطوة 4
- لتغيير الأمر drive_for من للأمام إلى للخلف، ما عليك سوى تغيير المعلمة الأولى إلى REVERSE. سيؤدي هذا إلى تحرك المحركات الموجودة في نظام نقل الحركة في الاتجاه المعاكس.
- يمكن تغيير عدد المليمتر، لكن في هذا المثال سنتركهم عند 100 ملم كما حددنا في الخطوة السابقة.
- ذكّر الطلاب بفصل كابل USB عن Robot Brain قبل تشغيل المشروع.
- ذكّر الطلاب بحفظ مشاريعهم أثناء عملهم. تشرح أقسام Python من مكتبة VEX ممارسات الحفظ في VEXcode V5.
الخطوة 5: انتظر ثم قم بالقيادة للخلف
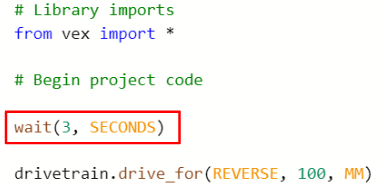
الآن بعد أن قمنا ببرمجة الروبوت للقيادة للأمام ثم للخلف، يمكننا الآن إضافة تعليمات انتظر بحيث ينتظر الروبوت فترة معينة من الوقت قبل القيادة للخلف.
-
أضف تعليمات الانتظار كما هو موضح. وهذا يخبر الروبوت بالانتظار ثلاث ثوانٍ قبل القيادة للخلف.
-
حدد اسم المشروع لتغييره من Reverse إلى WaitReverse.
-
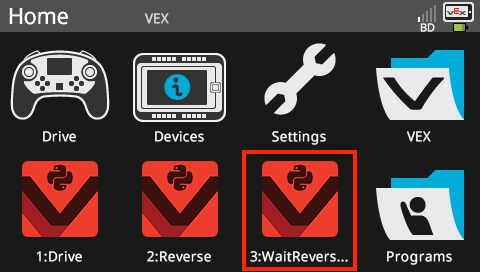
حدد أيقونة الفتحة لاختيار فتحة جديدة. حدد الفتحة 3.

-
قم بتنزيل (في Python) المشروع.

-
تحقق للتأكد من تنزيل مشروعك (في Python) من خلال النظر إلى شاشة Robot Brain. يجب إدراج اسم المشروع WaitReverse في الفتحة 3.
-
قم بتشغيل (في Python) المشروع على الروبوت من خلال التأكد من تحديد المشروع ثم الضغط على الزر تشغيل .

![]() أدوات المعلم
-
إكمال الخطوة 5
أدوات المعلم
-
إكمال الخطوة 5
- لن يؤدي استخدام الأمر انتظر إلى إنهاء المشروع، بل سيؤدي فقط إلى إيقاف الحركة الآلية مؤقتًا.
- إذا كان الطلاب يستخدمون جهاز كمبيوتر، فذكّرهم بفصل كابل USB عن Robot Brain قبل تشغيل المشروع.
- ذكّر الطلاب بحفظ مشاريعهم أثناء عملهم. يشرح قسم Python من مكتبة VEX ممارسات الحفظ في VEXcode V5.
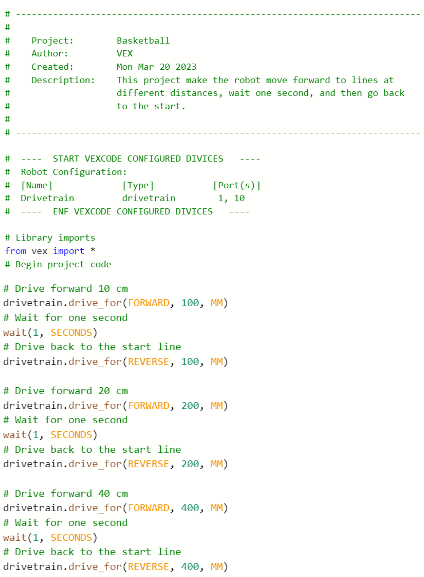
الخطوة 6: أكمل تحدي تدريبات كرة السلة!
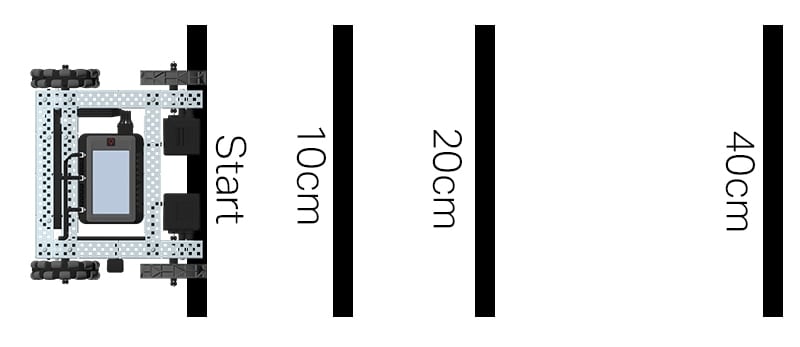
في تحدي تدريبات كرة السلة، يجب أن يكون الروبوت قادرًا على التنقل عبر سلسلة من الخطوط على مسافات مختلفة. سيتحرك الروبوت للأمام إلى الخط الأول الذي يبعد 10 سم عن موضع البداية، وينتظر ثانية واحدة، ثم يسافر للخلف عائداً إلى نفس الخط. سيقوم الروبوت بعد ذلك بتكرار الإجراء من خلال القيادة للأمام مسافة 20 سم إلى الخط الثاني، والانتظار لمدة ثانية واحدة، ثم العودة إلى خط البداية الأصلي. سيتقدم الروبوت إلى الخط الثالث بمسافة 40 سم، وينتظر ثانية واحدة، ثم يعود أخيرًا إلى خط البداية لإنهاء التحدي.
قبل برمجة الروبوت، قم بتخطيط مسار الروبوت وسلوكياته في دفتر الملاحظات الهندسي الخاص بك.
بعد إكمال تحدي كرة السلة، ستتمكن من الجمع بين الحركات الأمامية والخلفية مع سلوكيات الروبوت الإضافية لإكمال التحديات الأكثر تقدمًا.
ضع في اعتبارك عند البرمجة أن 1 سم = 10 مم.
![]() أدوات المعلم
-
توقف وناقش
أدوات المعلم
-
توقف وناقش
اطلب من الطلاب مشاركة حلولهم في أزواج قبل مناقشتها كفصل كامل. قم بتيسير المناقشة بسؤال:
- هل واجهتم أي صعوبات أثناء برمجة هذا التحدي؟
- هل تصرف الروبوت الخاص بك كما توقعت بناءً على مشروعك؟ لما و لما لا؟
- إذا كان بإمكانك إنهاء التحدي، هل هناك أي شيء كنت ستفعله بشكل مختلف؟
![]() أدوات المعلم
-
الحل
أدوات المعلم
-
الحل