![]() Skolotāja rīkkopa
-
Aktivitātes izklāsts
Skolotāja rīkkopa
-
Aktivitātes izklāsts
Šī izpēte iepazīstinās studentus ar pamata braukšanas uz priekšu, atpakaļgaitas un gaidīšanas programmēšanas uzvedībām. Šīs pamatprasmes palīdzēs viņiem gūt panākumus nākamajā darbībā un Strike Challenge šīs STEM laboratorijas beigās, kad viņi sacentīsies boulingā, izmantojot Speedbot.
Izmantojot V5 Speedbot (piedziņas 2-motoru, bez žiroskopa) veidņu projektu, skolēni var ieprogrammēt Speedbot virzīties uz priekšu, izmantojot tikai vienu norādījumu.
Speedbot ir gatavs kustībai!
Šī izpēte sniegs jums rīkus, lai varētu ieprogrammēt savu Speedbot vienkāršām kustībām. Šīs aktivitātes beigās jūs iesaistīsities Basketbola treniņu izaicinājumā, izmantojot uz priekšu, atpakaļgaitu un nogaidošu uzvedību.
![]() Skolotāja rīklodziņš
Skolotāja rīklodziņš
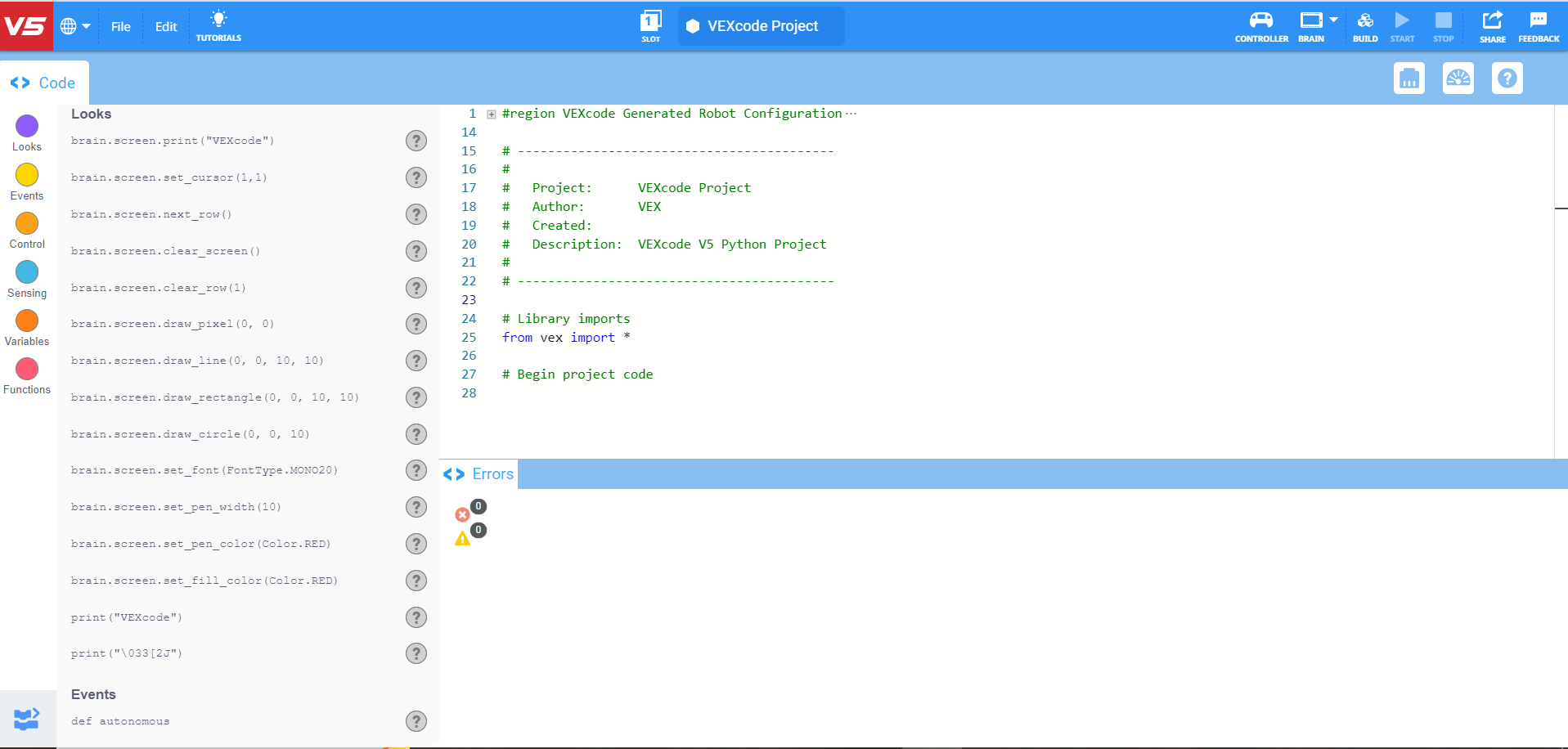
Šeit ir pārskats par VEXcode V5 lietotāja interfeisu. Studenti tiks iepazīstināti ar šīm cilnēm/pogām šīs Momentum Alley STEM laboratorijas aktivitāšu laikā. Visā STEM laboratorijā ir pieejamas arī saites, lai sniegtu plašāku informāciju par šīm cilnēm/pogām.
-
VEXcode V5 Python instrukcijas, kas tiks izmantotas šajā izpētē:
-
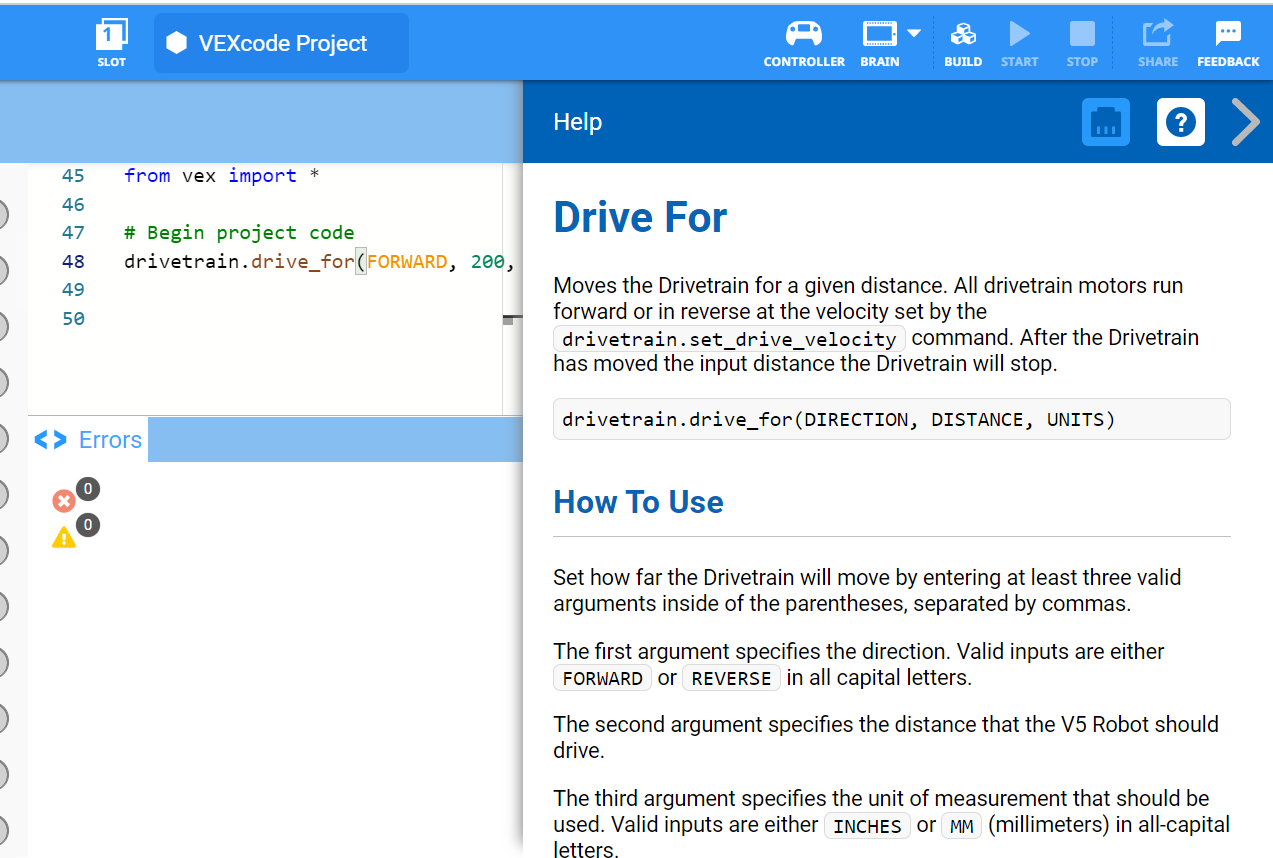
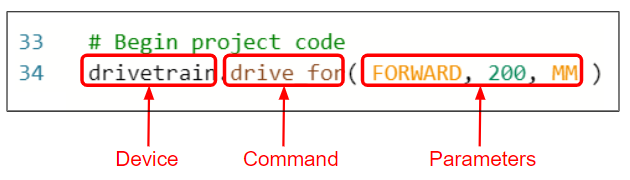
drivetrain.drive_for(FORWARD, 200, MM)
-
pagaidiet (1, sekundes)
-
-
Lai uzzinātu vairāk par instrukciju, atlasiet Palīdzība un pēc tam atlasiet jautājuma zīmes ikonu blakus komandai, lai skatītu plašāku informāciju.
-
Pārliecinieties, vai jums ir vajadzīgā aparatūra, inženierijas piezīmjdators un VEXcode V5 ir lejupielādēti un gatavi.
![]() Skolotāju padomi
Skolotāju padomi
Ja šī ir pirmā reize, kad students izmanto VEXcode V5, viņš jebkurā laikā šīs izpētes laikā var atsaukties uz apmācībām.

| Daudzums | Nepieciešamie materiāli |
|---|---|
| 1 |
Speedbot robots |
| 1 |
Uzlādēts robota akumulators |
| 1 |
VEXcode V5 |
| 1 |
USB kabelis (ja izmantojat datoru) |
| 1 |
Inženierzinātņu piezīmju grāmatiņa |
![]() Skolotāju padomi
Skolotāju padomi
Modelējiet katru problēmu novēršanas darbību skolēniem.
1. darbība: Sagatavošanās izpētei
Vai pirms aktivitātes sākšanas jums ir gatavs katrs no šiem priekšmetiem? Pārbaudiet katru no šiem:
-
Vai motori ir pievienoti pareizajiem portiem?
-
Vai viedie kabeļi ir pilnībā ievietoti visos motoros?
-
Vai Brain ir ieslēgts?
-
Vai akumulators ir uzlādēts?
2. darbība: Sāciet jaunu projektu
Lai sāktu projektu, veiciet šādas darbības:
-
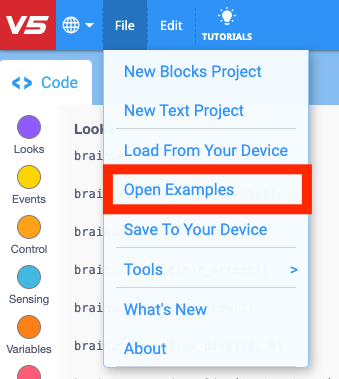
Atveriet izvēlni Fails un atlasiet Atvērt piemērus.
-
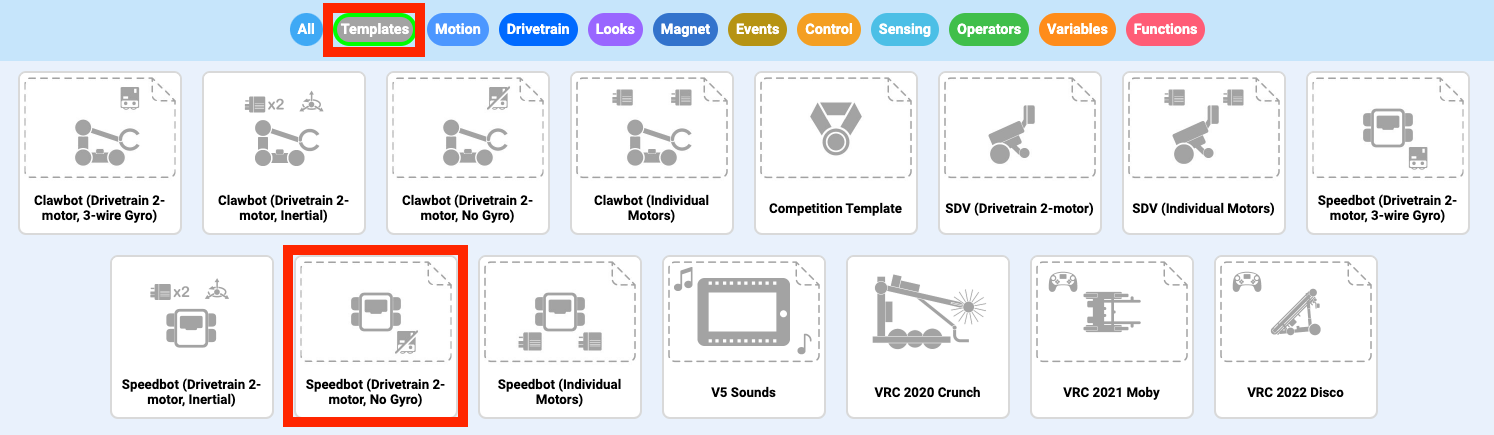
Atlasiet un atveriet veidnes projektu Speedbot (Drivetrain 2-motor, No Gyro). Veidnes projektā ir iekļauta Speedbot motora konfigurācija. Ja veidne netiek izmantota, jūsu robots projektu nedarbos pareizi.
-
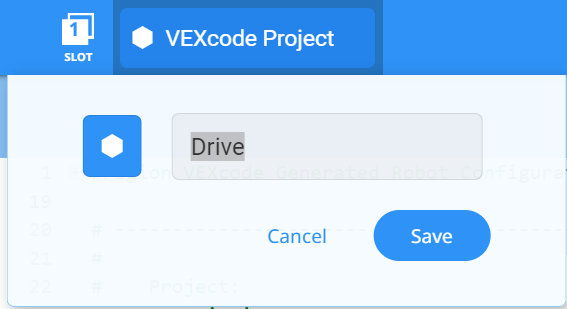
Tā kā jūs strādāsit pie Speedbot pārvietošanas uz priekšu un atpakaļ, jūs piešķirsit savam projektam nosaukumu Drive. Atlasiet projekta nosaukumu, ierakstiet “Disks” un pēc tam atlasiet “Saglabāt”.
![]() Skolotāju padomi
Skolotāju padomi
-
Projektu nosaukumos var būt atstarpes starp vai aiz vārdiem.

-
Varat lūgt studentiem projekta nosaukumam pievienot savus iniciāļus vai savas grupas nosaukumu. Tas palīdzēs atšķirt projektus, ja lūgsit studentus tos iesniegt.
-
Tā kā šī ir pirmā darbība ar programmēšanu, ko jūsu skolēni var mēģināt veikt, jums vajadzētu modelēt soļus un pēc tam lūgt studentiem veikt tās pašas darbības. Pēc tam skolotājam jāuzrauga skolēni, lai pārliecinātos, ka viņi pareizi izpilda darbības.
-
Pārliecinieties, vai skolēni izvēlnē Fails ir atlasījuši Atvērt piemērus.
-
Pārliecinieties, vai skolēni ir izvēlējušies Speedbot (Drivetrain 2-motor, No Gyro) veidnes projektu.
-
Varat norādīt skolēniem, ka lapā Piemēri ir vairākas izvēles iespējas. Veidojot un izmantojot citus robotus, viņiem būs iespēja izmantot dažādas veidnes.
-
Pārbaudiet, vai projekta nosaukums Drive tagad ir logā rīkjoslas centrā.

![]() Skolotāju rīkkopa
Projektu
Skolotāju rīkkopa
Projektu
-
Norādiet, ka, pirmo reizi atverot VEXcode V5, logs tika apzīmēts ar nosaukumu VEXcode Project. VEXcode Project ir noklusējuma projekta nosaukums, pirmo reizi atverot VEXcode V5. Kad projekts tika pārdēvēts par Drive un saglabāts, displejs tika atjaunināts, lai parādītu jauno projekta nosaukumu. Izmantojot šo logu rīkjoslā, ir viegli pārbaudīt, vai skolēni izmanto pareizo projektu.
-
Pastāstiet studentiem, ka viņi tagad ir gatavi sākt savu pirmo projektu. Paskaidrojiet skolēniem, ka, veicot tikai dažas vienkāršas darbības, viņi varēs izveidot un vadīt projektu, kas virzīs Speedbot uz priekšu.
-
Atgādiniet studentiem darba laikā saglabāt savus projektus. Python sadaļas no VEX bibliotēkas izskaidro saglabāšanas praksi VEXcode V5.
![]() Skolotāju rīkkopa
-
Apstāties un apspriest
Skolotāju rīkkopa
-
Apstāties un apspriest
Tas ir labs punkts, lai apturētu un likt studentiem pārskatīt soļus, kas tikko tika pabeigti, uzsākot jaunu projektu VEXcode V5 individuāli vai grupās. Palūdziet studentiem pārdomāt individuāli, pirms dalās savā grupā vai visai klasei.
3. darbība: Brauciet uz priekšu
Tagad esat gatavs sākt programmēt robotu, lai tas brauktu uz priekšu!
-
Pirms sākam programmēt, mums ir jāsaprot, kas ir instrukcija. Instrukcijai ir trīs daļas. Lai iegūtu papildinformāciju par koda iekrāsošanu VEXcode V5 Python, šo rakstu.
-
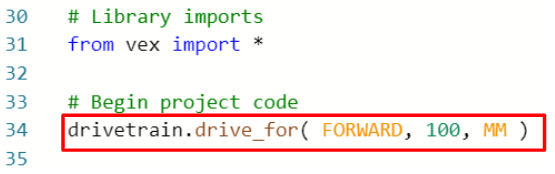
Pievienojiet projektam instrukciju:
![]() Skolotāju padomi
Skolotāju padomi
Sākot rakstīt instrukciju, iespējams, pamanīsit automātiskās pabeigšanas funkciju. Izmantojiet taustiņus “Uz augšu” un “Uz leju”, lai atlasītu vajadzīgo nosaukumu, pēc tam nospiediet tastatūras taustiņu “Tab” vai (Enter/Return), lai veiktu atlasi. Lai iegūtu papildinformāciju par šo līdzekli, skatiet Python rakstu. 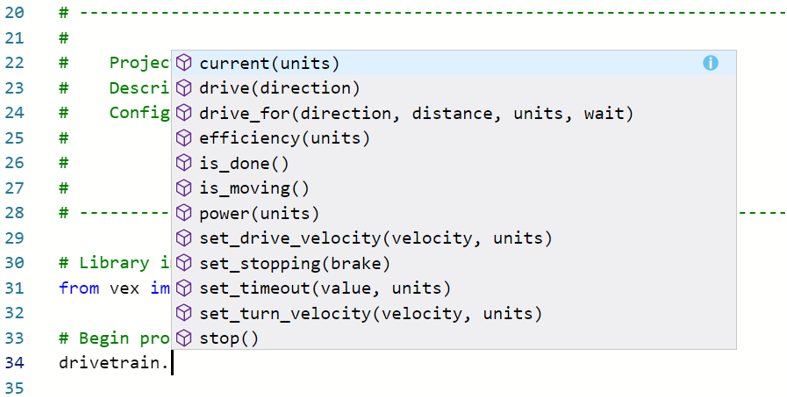
-
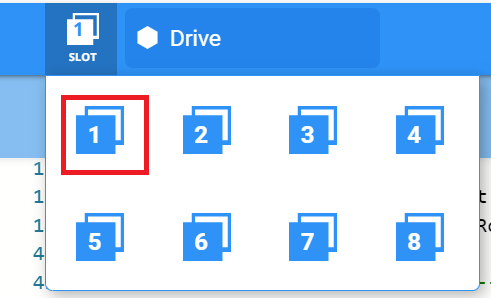
Atlasiet ikonu Slot, lai izvēlētos vienu no astoņiem pieejamajiem Robot Brain slotiem, un atlasiet slotu 1.
-
Savienojiet V5 Robot Brain ar datoru, izmantojot mikro USB kabeli, un ieslēdziet V5 Robot Brain. Smadzeņu ikona rīkjoslā kļūst zaļa , tiklīdz ir izveidots veiksmīgs savienojums.

-
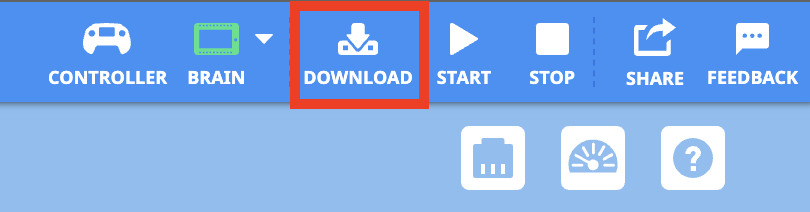
Atlasiet Lejupielādēt , lai lejupielādētu projektu programmā Brain.

![]() Skolotāja rīklodziņš
Skolotāja rīklodziņš
Atgādiniet studentiem atvienot USB kabeli no robota smadzenēm. Ja robots ir pieslēgts datoram projekta izpildes laikā, robots var aizvilkt savienojuma kabeli.
![]() Skolotāja rīkkopa
-
Apstāties un apspriest
Skolotāja rīkkopa
-
Apstāties un apspriest
Lūdziet studentus paredzēt, kas, viņuprāt, notiks, kad šis projekts tiks lejupielādēts un palaists Speedbot. Pastāstiet studentiem ierakstīt savas prognozes savās inženierzinātņu piezīmju grāmatiņās. Ja laiks atļauj, palūdziet katrai grupai dalīties savās prognozēs.
-
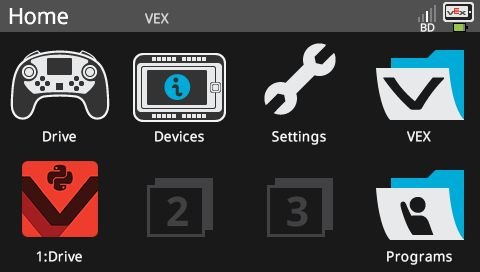
Pārbaudiet, vai jūsu projekts ir lejupielādēts apskatot Robot Brain ekrānu. Projekta nosaukumam Drive ir jābūt norādītam 1. slotā.
![]() Skolotāju rīkkopa
-
Vispirms modelis
Skolotāju rīkkopa
-
Vispirms modelis
- Modelējiet projektu, kas darbojas klases priekšā, pirms visi skolēni mēģina vienlaikus. Sapulciniet skolēnus vienā zonā un atstājiet pietiekami daudz vietas Speedbot kustībai, ja tas ir novietots uz grīdas.
- Pastāstiet studentiem, ka tagad ir viņu kārta vadīt savu projektu. Pārliecinieties, vai tiem ir brīvs ceļš un neviens Speedbots nesaskaras.
-
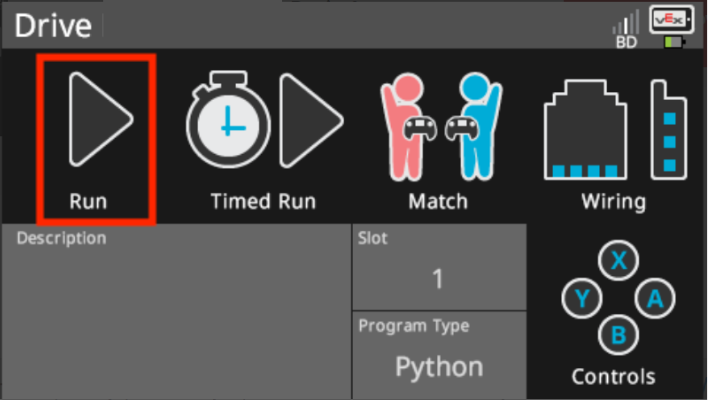
Palaidiet (Python) projektu robotā, pārliecinoties, ka projekts ir atlasīts, un pēc tam nospiediet pogu Run uz robota smadzeņu. Apsveicam ar pirmā projekta izveidi!
4. darbība: Braukt atpakaļgaitā
Tagad, kad esat ieprogrammējis savu robotu braukt uz priekšu, ļaujiet mums ieprogrammēt to braukt atpakaļgaitā.
-
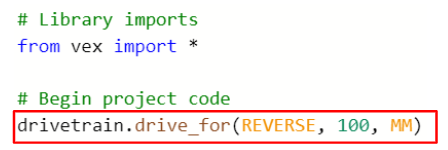
Mainiet parametru instrukcijā drive_for , lai parādītu REVERSE , nevis FORWARD.
-
Atlasiet projekta nosaukumu, lai mainītu to no Drive uz Reverse.

-
Atlasiet slota ikonu, lai izvēlētos jaunu slotu. Izvēlieties 2. slotu.

-
Lejupielādējiet projektu ( Python) .
-
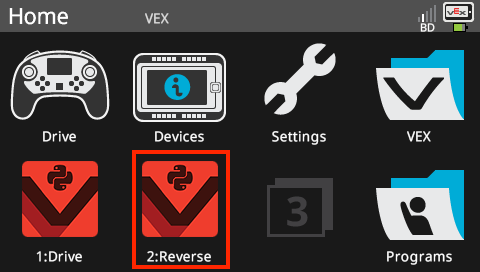
Pārbaudiet, vai jūsu projektā ir lejupielādēts ( Python) apskatot robota smadzeņu ekrānu. Projekta nosaukumam Reverse jābūt norādītam 2. vietā.
-
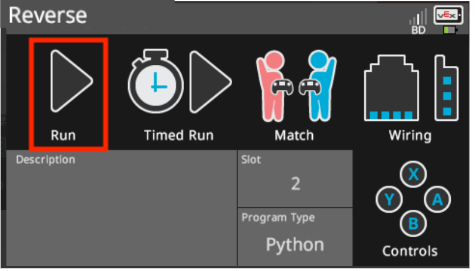
Palaidiet ( Python) projektu robotā, pārliecinoties, ka projekts ir atlasīts, un pēc tam nospiediet pogu Run uz robota smadzeņu.
![]() Skolotāja rīkkopa
darbības pabeigšana
Skolotāja rīkkopa
darbības pabeigšana
- Lai mainītu komandu drive_for no uz priekšu uz atpakaļgaitā, vienkārši mainiet pirmo parametru uz REVERSE. Tādējādi piedziņas motori pārvietosies pretējā virzienā.
- mm skaitu var mainīt, taču šajā piemērā mēs tos atstāsim uz 100 mm, kā iestatīts iepriekšējā darbībā.
- Atgādiniet studentiem pirms projekta palaišanas atvienot USB kabeli no Robot Brain.
- Atgādiniet studentiem darba laikā saglabāt savus projektus. Python sadaļas no VEX bibliotēkas izskaidro saglabāšanas praksi VEXcode V5.
5. darbība: Uzgaidiet, tad brauciet atpakaļgaitā
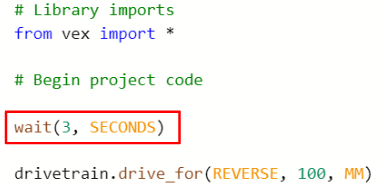
Tagad, kad esam ieprogrammējuši robotu braukt uz priekšu un pēc tam atpakaļgaitā, tagad varam pievienot norādījumu gaidīt , lai robots gaidītu noteiktu laiku pirms braukšanas atpakaļgaitā.
-
Pievienojiet gaidīšanas norādījumu, kā parādīts attēlā. Tas liek robotam pagaidīt trīs sekundes, pirms braukt atpakaļgaitā.
-
Atlasiet projekta nosaukumu, lai mainītu to no Reverse uz WaitReverse.
-
Atlasiet slota ikonu, lai izvēlētos jaunu slotu. Izvēlieties slotu 3.

-
Lejupielādējiet projektu ( Python) .

-
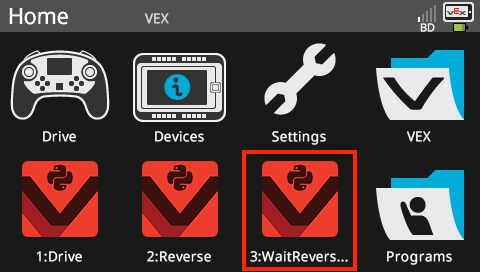
Pārbaudiet, vai jūsu projekts ir lejupielādēts ( Python) , apskatot Robot Brain ekrānu. Projekta nosaukumam WaitReverse jābūt norādītam 3. vietā.
-
Palaidiet ( Python) projektu robotā, pārliecinoties, ka projekts ir atlasīts, un pēc tam nospiediet pogu Run .

![]() Skolotāju rīkkopa
darbības pabeigšana
Skolotāju rīkkopa
darbības pabeigšana
- Izmantojot komandu gaidīt projekts netiks beigts, tas tikai aptur robotu kustību.
- Ja skolēni izmanto datoru, atgādiniet viņiem pirms projekta palaišanas atvienot USB kabeli no Robot Brain.
- Atgādiniet studentiem darba laikā saglabāt savus projektus. Sadaļā Python no VEX bibliotēkas ir izskaidrota saglabāšanas prakse VEXcode V5.
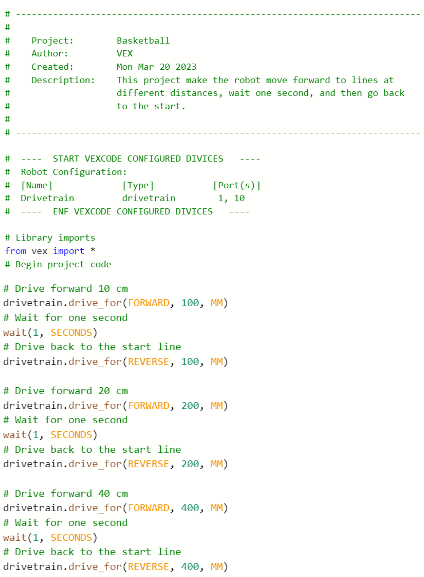
6. solis: Pabeidziet basketbola treniņu izaicinājumu!
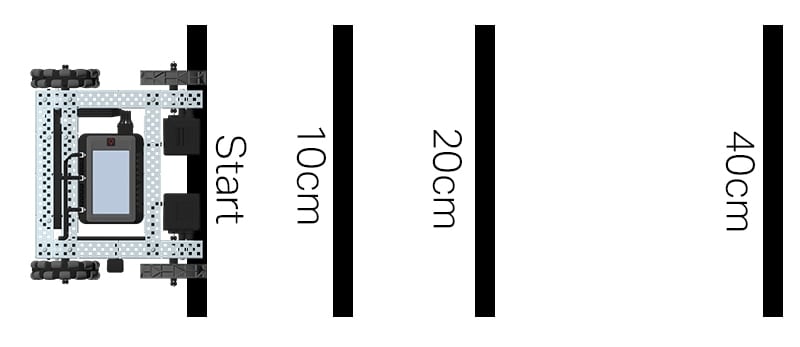
Basketbola treniņu izaicinājumā robotam jāspēj pārvietoties pa virkni līniju dažādos attālumos. Robots virzīsies uz priekšu līdz pirmajai līnijai, kas atrodas 10 cm no sākuma pozīcijas, pagaidīs 1 sekundi un pēc tam dosies atpakaļ, atgriežoties tajā pašā līnijā. Pēc tam robots atkārtos darbību, nobraucot 20 cm uz priekšu līdz otrajai līnijai, pagaidiet 1 sekundi un pēc tam brauc atpakaļ uz sākotnējo starta līniju. Robots brauks uz priekšu uz trešo līniju ar 40 cm attālumu, pagaidīs 1 sekundi un tad beidzot atgriezīsies starta rindā, lai pabeigtu izaicinājumu.
Pirms robota programmēšanas savā inženierijas piezīmjdatorā izplānojiet robota ceļu un uzvedību.
Pēc Basketbola izaicinājuma pabeigšanas jūs varēsiet apvienot kustības uz priekšu un atpakaļgaitu ar papildu robota uzvedību, lai izpildītu vēl sarežģītākus izaicinājumus.
Programmējot paturiet prātā, ka 1 cm = 10 mm.
![]() Skolotāju rīkkopa
-
Apstāties un apspriest
Skolotāju rīkkopa
-
Apstāties un apspriest
Palūdziet studentiem dalīties savos risinājumos pa pāriem, pirms tos apspriež visa klase. Veiciniet diskusiju, uzdodot jautājumu:
- Vai, programmējot šo izaicinājumu, saskārāties ar kādām grūtībām?
- Vai jūsu robots izturējās tā, kā jūs gaidījāt, pamatojoties uz jūsu projektu? Kāpēc vai kāpēc ne?
- Ja jūs varētu izpildīt izaicinājumu, vai ir kaut kas, ko jūs būtu darījis savādāk?
![]() Skolotāju rīkkopa
-
Risinājums
Skolotāju rīkkopa
-
Risinājums