![]() กล่องเครื่องมือครู
-
โครงร่างกิจกรรม
กล่องเครื่องมือครู
-
โครงร่างกิจกรรม
การสำรวจนี้จะแนะนำให้นักเรียนรู้จักพฤติกรรมการเขียนโปรแกรมการขับเคลื่อนไปข้างหน้า ถอยหลัง และการรอคอยขั้นพื้นฐาน ทักษะพื้นฐานเหล่านี้จะช่วยให้พวกเขาประสบความสำเร็จในกิจกรรมต่อไปและใน Strike Challenge ที่ส่วนท้ายของ STEM Lab นี้ ซึ่งพวกเขาจะแข่งขันโบว์ลิ่งโดยใช้ Speedbot
การใช้โปรเจ็กต์เทมเพลต V5 Speedbot (ระบบขับเคลื่อน 2 มอเตอร์ ไม่มีไจโร) ช่วยให้นักเรียนสามารถตั้งโปรแกรม Speedbot ให้ก้าวไปข้างหน้าได้โดยใช้เพียงคำสั่งเดียว
Speedbot พร้อมเคลื่อนที่แล้ว!
การสำรวจนี้จะให้เครื่องมือแก่คุณในการตั้งโปรแกรม Speedbot ของคุณสำหรับการเคลื่อนไหวง่ายๆ เมื่อสิ้นสุดกิจกรรมนี้ คุณจะเข้าร่วมการแข่งขัน Basketball Drills Challenge โดยใช้พฤติกรรมเดินหน้า ถอยหลัง และรอคอย
![]() กล่องเครื่องมือครู
กล่องเครื่องมือครู
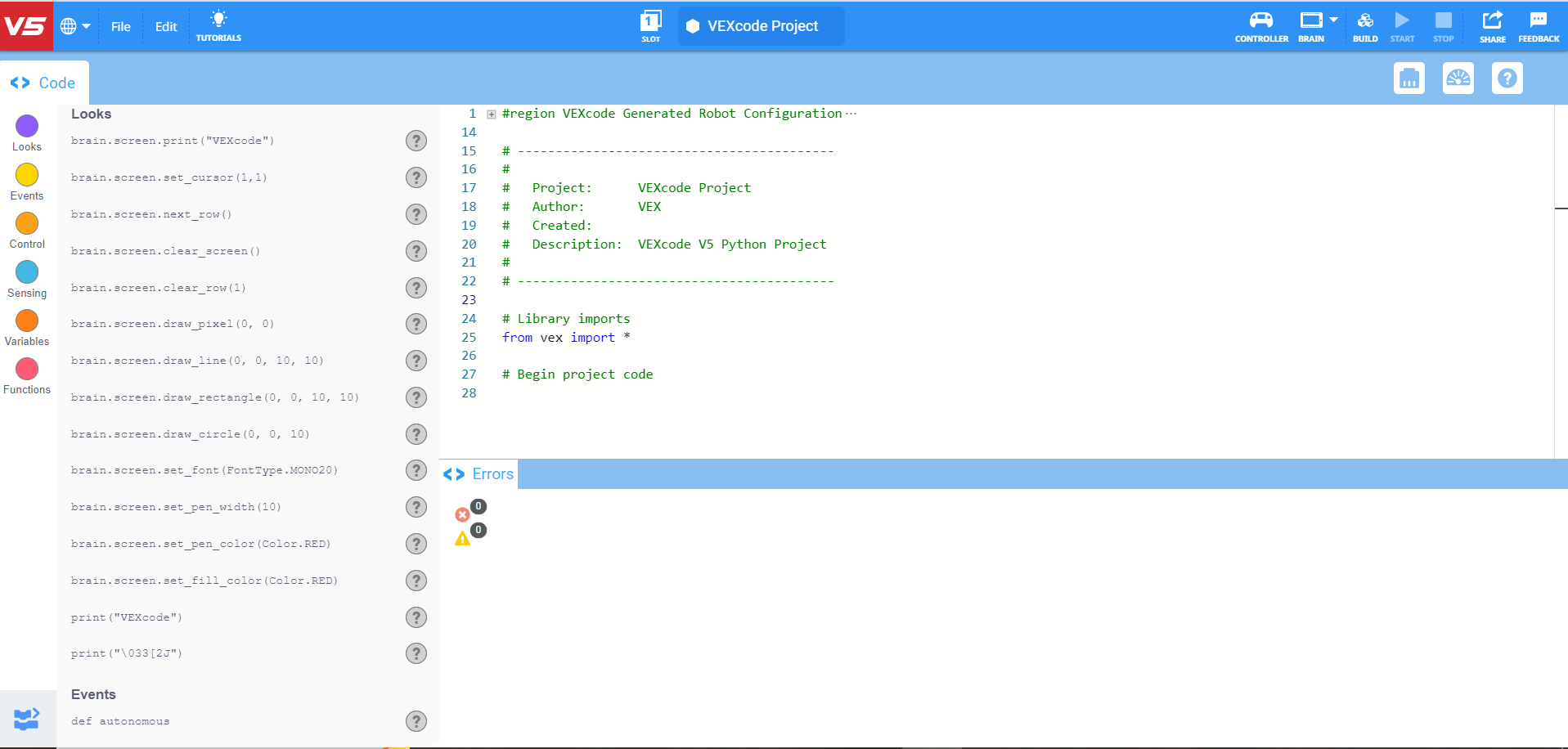
นี่คือภาพรวมของ User Interface ของ VEXcode V5 นักเรียนจะได้รู้จักกับแท็บ/ปุ่มเหล่านี้ระหว่างกิจกรรมใน Momentum Alley STEM Lab นี้ นอกจากนี้ยังมีลิงก์ให้ทั่วทั้ง STEM Lab เพื่อให้ข้อมูลเพิ่มเติมเกี่ยวกับแท็บ/ปุ่มเหล่านี้
-
คำแนะนำ VEXcode V5 Python ที่จะใช้ในการสำรวจนี้:
-
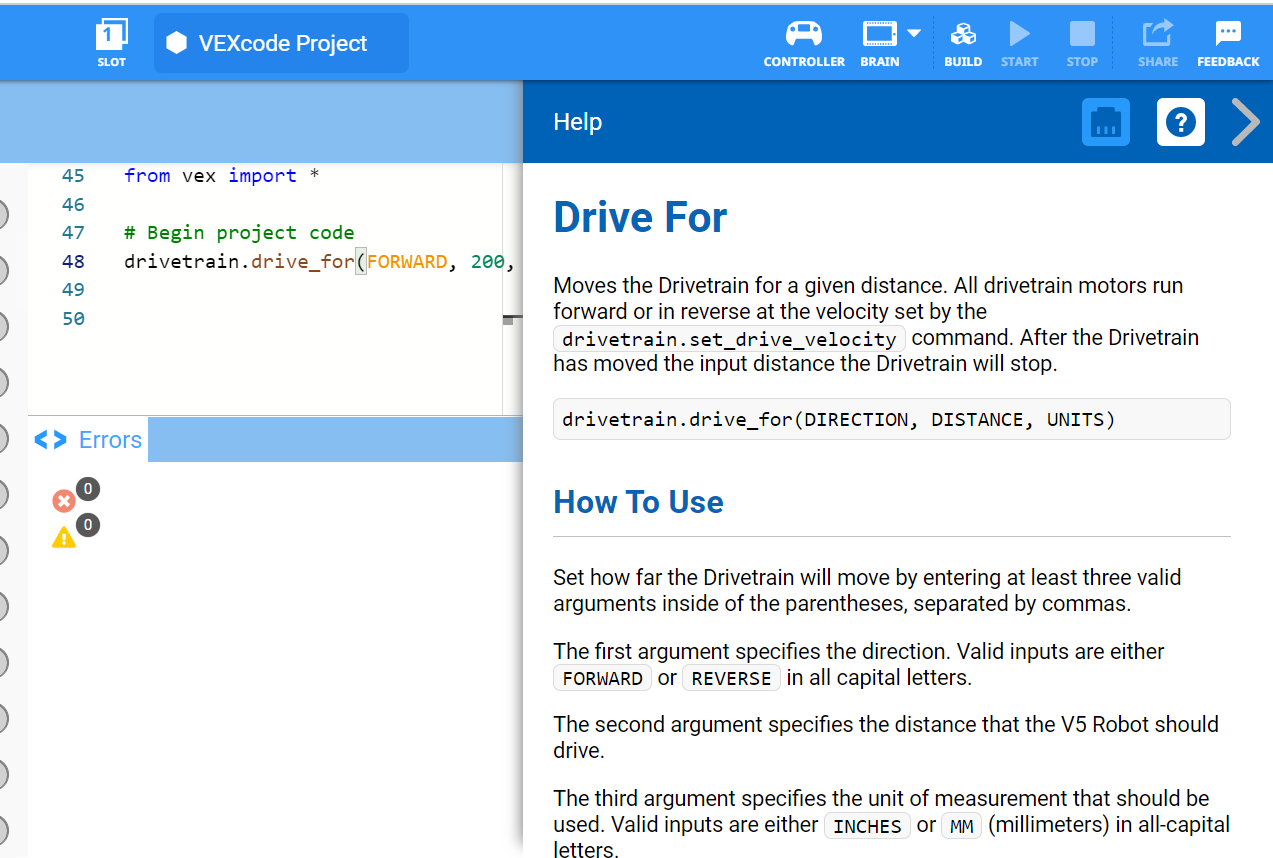
drivetrain.drive_for(ไปข้างหน้า, 200, MM)
-
รอ (1, วินาที)
-
-
หากต้องการข้อมูลเพิ่มเติมเกี่ยวกับคำแนะนำ ให้เลือกวิธีใช้ จากนั้นเลือกไอคอนเครื่องหมายคำถามที่อยู่ถัดจากคำสั่งเพื่อดูข้อมูลเพิ่มเติม
-
ตรวจสอบให้แน่ใจว่าคุณมีฮาร์ดแวร์ที่จำเป็น ดาวน์โหลดโน้ตบุ๊กวิศวกรรม และ VEXcode V5 และพร้อมใช้งานแล้ว
![]() เคล็ดลับของครู
เคล็ดลับของครู
หากนี่เป็นครั้งแรกของนักเรียนที่ใช้ VEXcode V5 พวกเขาสามารถอ้างอิงบทช่วยสอนได้ตลอดเวลาระหว่างการสำรวจนี้

| ปริมาณ | วัสดุที่จำเป็น |
|---|---|
| 1 |
หุ่นยนต์สปีดบอท |
| 1 |
แบตเตอรี่หุ่นยนต์ที่ชาร์จแล้ว |
| 1 |
VEXโค้ด V5 |
| 1 |
สาย USB (หากใช้คอมพิวเตอร์) |
| 1 |
สมุดบันทึกวิศวกรรมศาสตร์ |
![]() เคล็ดลับของครู
เคล็ดลับของครู
จำลองขั้นตอนการแก้ปัญหาแต่ละขั้นตอนให้กับนักเรียน
ขั้นตอนที่ 2: เริ่มโครงการใหม่
ทำตามขั้นตอนต่อไปนี้เพื่อเริ่มโครงการ:
-
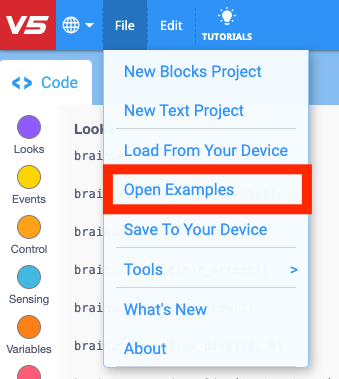
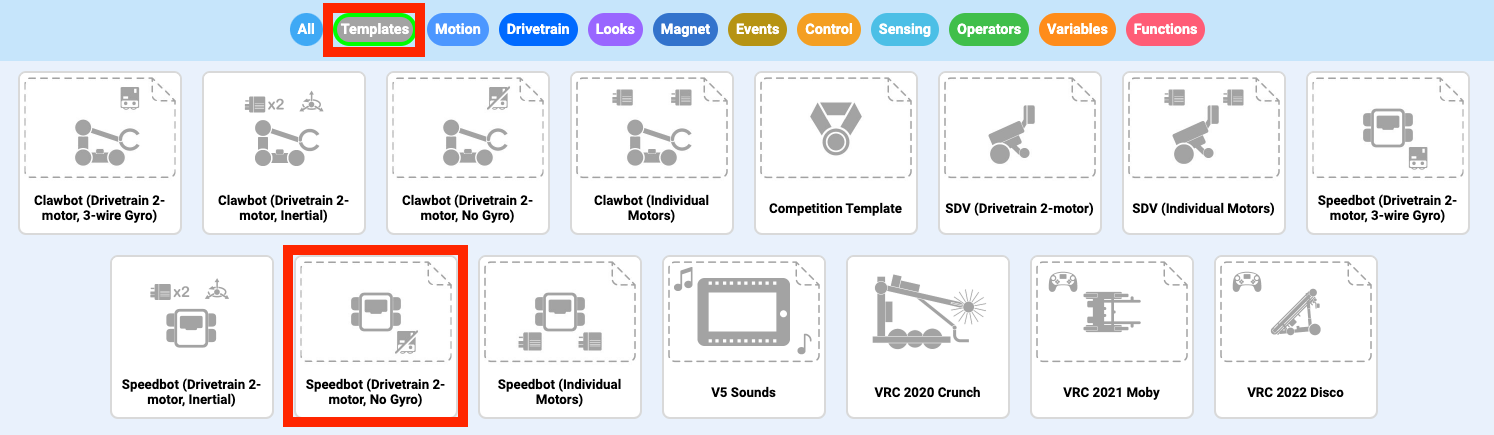
เปิดเมนูไฟล์แล้วเลือกเปิดตัวอย่าง
-
เลือกและเปิดโปรเจ็กต์เทมเพลต Speedbot (ระบบขับเคลื่อน 2 มอเตอร์ ไม่มีไจโร) โครงการเทมเพลตประกอบด้วยกำหนดค่ามอเตอร์ ของ Speedbot หากไม่ได้ใช้เทมเพลต หุ่นยนต์ของคุณจะไม่สามารถดำเนินโครงการได้อย่างถูกต้อง
-
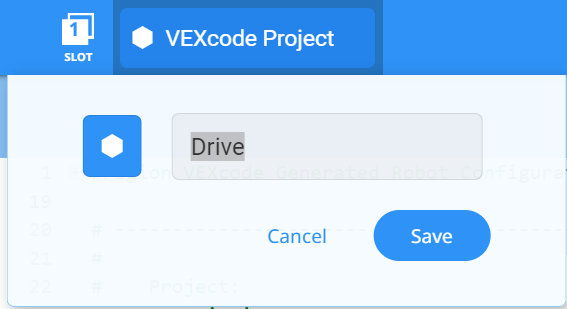
เนื่องจากคุณจะต้องพยายามย้าย Speedbot ไปข้างหน้าและย้อนกลับ คุณจะต้องตั้งชื่อโปรเจ็กต์ของคุณ Drive เลือกชื่อโครงการ พิมพ์ 'ไดรฟ์' จากนั้นเลือก 'บันทึก'
![]() เคล็ดลับของครู
เคล็ดลับของครู
-
ชื่อโปรเจ็กต์สามารถมีช่องว่างระหว่างหรือหลังคำได้

-
คุณสามารถขอให้นักเรียนเพิ่มชื่อย่อหรือชื่อกลุ่มลงในชื่อโปรเจ็กต์ได้ ซึ่งจะช่วยแยกแยะโปรเจ็กต์ต่างๆ หากคุณขอให้นักเรียนส่ง
-
เนื่องจากนี่เป็นกิจกรรมแรกในการเขียนโปรแกรมที่นักเรียนของคุณอาจลองทำ คุณควรจำลองขั้นตอนต่างๆ แล้วขอให้นักเรียนดำเนินการแบบเดียวกัน จากนั้นครูควรติดตามนักเรียนเพื่อให้แน่ใจว่าพวกเขาทำตามขั้นตอนอย่างถูกต้อง
-
ตรวจสอบให้แน่ใจว่านักเรียนได้เลือก Open Examples จากเมนู File
-
ตรวจสอบให้แน่ใจว่านักเรียนได้เลือกโปรเจ็กต์เทมเพลต Speedbot (ระบบขับเคลื่อน 2 มอเตอร์ ไม่มีไจโร)
-
คุณสามารถชี้ให้นักเรียนเห็นว่ามีหลายตัวเลือกให้เลือกในหน้าตัวอย่าง ขณะที่พวกเขาสร้างและใช้หุ่นยนต์ตัวอื่น พวกเขาจะมีโอกาสใช้เทมเพลตที่แตกต่างกัน
-
ตรวจสอบเพื่อให้แน่ใจว่าชื่อโปรเจ็กต์ ไดรฟ์ อยู่ในหน้าต่างตรงกลางของแถบเครื่องมือแล้ว

![]() กล่องเครื่องมือครู
-
บันทึกโครงการ
กล่องเครื่องมือครู
-
บันทึกโครงการ
-
ชี้ให้เห็นว่าเมื่อพวกเขาเปิด VEXcode V5 เป็นครั้งแรก หน้าต่างจะมีป้ายกำกับว่า VEXcode Project โครงการ VEXcode เป็นชื่อโครงการเริ่มต้นเมื่อเปิด VEXcode V5 ครั้งแรก เมื่อเปลี่ยนชื่อโปรเจ็กต์เป็น Drive และบันทึกแล้ว จอแสดงผลจะได้รับการอัปเดตเพื่อแสดงชื่อโปรเจ็กต์ใหม่ การใช้หน้าต่างนี้ในแถบเครื่องมือทำให้ง่ายต่อการตรวจสอบว่านักเรียนกำลังใช้โครงงานที่ถูกต้อง
-
บอกนักเรียนว่าพวกเขาพร้อมที่จะเริ่มโครงงานแรกแล้ว อธิบายให้นักเรียนฟังว่าเพียงทำตามขั้นตอนง่ายๆ ไม่กี่ขั้นตอน ก็จะสามารถสร้างและดำเนินโครงการที่จะขับเคลื่อน Speedbot ไปข้างหน้าได้
-
เตือนนักเรียนให้บันทึกโครงงานของตนขณะทำงาน Python ส่วนที่ จาก VEX Library อธิบายแนวทางปฏิบัติในการบันทึกใน VEXcode V5
![]() กล่องเครื่องมือครู
-
หยุดและอภิปราย
กล่องเครื่องมือครู
-
หยุดและอภิปราย
นี่เป็นจุดที่ดีที่จะหยุดชั่วคราวและให้นักเรียนทบทวนขั้นตอนที่เพิ่งเสร็จสิ้นในการเริ่มโปรเจ็กต์ใหม่ใน VEXcode V5 เป็นรายบุคคลหรือเป็นกลุ่ม ขอให้นักเรียนไตร่ตรองเป็นรายบุคคลก่อนแบ่งปันภายในกลุ่มหรือกับทั้งชั้นเรียน
ขั้นตอนที่ 3: ขับไปข้างหน้า
ตอนนี้คุณพร้อมที่จะเริ่มตั้งโปรแกรมหุ่นยนต์ให้ขับเคลื่อนไปข้างหน้าแล้ว!
-
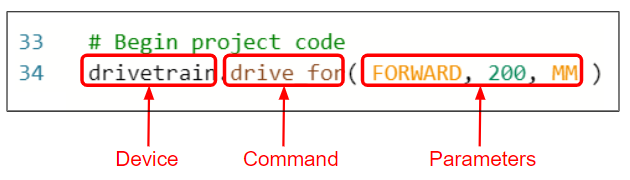
ก่อนที่เราจะเริ่มเขียนโปรแกรมเราต้องเข้าใจว่าคำสั่งคืออะไร คำสั่งมีสามส่วน สำหรับข้อมูลเพิ่มเติมเกี่ยวกับการเปลี่ยนสีของโค้ดใน VEXcode V5 Python ดูบทความนี้
-
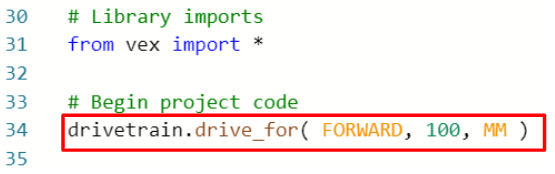
เพิ่มคำสั่งให้กับโครงการ:
![]() เคล็ดลับของครู
เคล็ดลับของครู
คุณอาจสังเกตเห็นฟังก์ชันเติมข้อความอัตโนมัติเมื่อคุณเริ่มพิมพ์คำสั่ง ใช้ปุ่ม "ขึ้น" และ "ลง" เพื่อเลือกชื่อที่คุณต้องการ จากนั้นกด "Tab" หรือ (Enter/Return) บนแป้นพิมพ์เพื่อทำการเลือก สำหรับข้อมูลเพิ่มเติมเกี่ยวกับคุณสมบัตินี้ โปรดดูบทความ Python 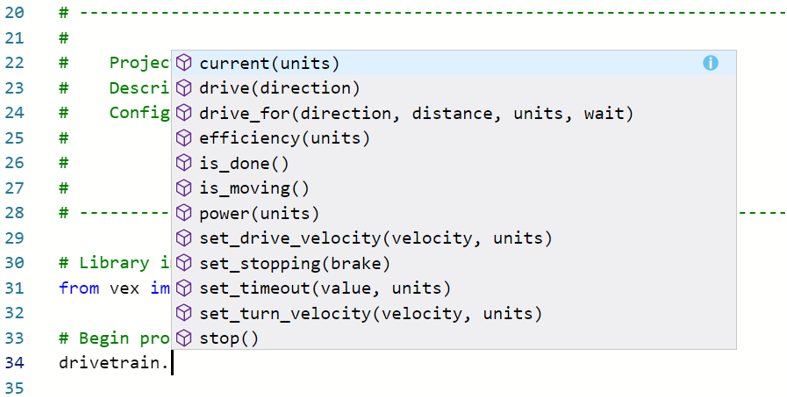
-
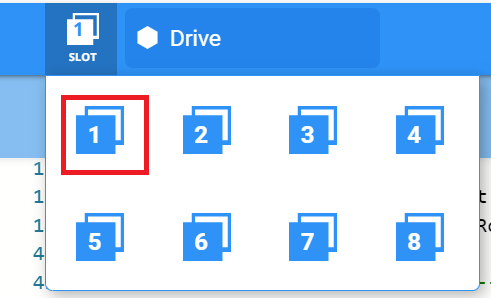
เลือกไอคอนช่องเพื่อเลือกหนึ่งในแปดช่องที่มีอยู่บน Robot Brain และเลือกช่องที่ 1
-
เชื่อมต่อ V5 Robot Brain เข้ากับคอมพิวเตอร์โดยใช้สายไมโคร USB และเปิด V5 Robot Brain ไอคอนสมองในแถบเครื่องมือ เปลี่ยนเป็นสีเขียว เมื่อทำการเชื่อมต่อสำเร็จ

-
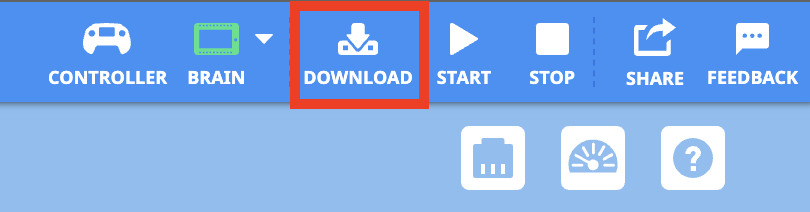
เลือก ดาวน์โหลด เพื่อดาวน์โหลดโครงการไปยัง Brain

![]() กล่องเครื่องมือครู
กล่องเครื่องมือครู
เตือนผู้เรียนให้ถอดสาย USB ออกจาก Robot Brain การมีหุ่นยนต์เชื่อมต่อกับคอมพิวเตอร์ในขณะที่ดำเนินโครงการอาจทำให้หุ่นยนต์ดึงสายเชื่อมต่อ
![]() กล่องเครื่องมือครู
-
หยุดและอภิปราย
กล่องเครื่องมือครู
-
หยุดและอภิปราย
ขอให้นักเรียนคาดการณ์สิ่งที่พวกเขาคิดว่าจะเกิดขึ้นเมื่อมีการดาวน์โหลดและเรียกใช้โปรเจ็กต์นี้บน Speedbot บอกให้นักเรียนบันทึกคำทำนายลงในสมุดบันทึกทางวิศวกรรม หากมีเวลา ขอให้แต่ละกลุ่มแบ่งปันคำทำนายของตน
-
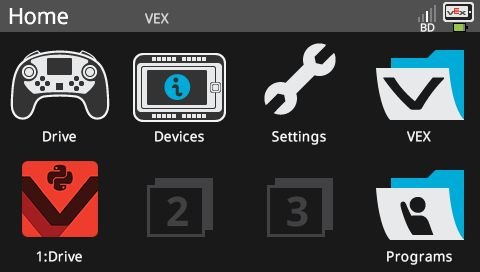
ตรวจสอบเพื่อให้แน่ใจว่าโครงการของคุณมี ดาวน์โหลด โดยดูที่หน้าจอของ Robot Brain ชื่อโปรเจ็กต์ Drive ควรแสดงอยู่ใน Slot 1
![]() กล่องเครื่องมือครู
-
รุ่นก่อน
กล่องเครื่องมือครู
-
รุ่นก่อน
- แบบจำลองดำเนินโครงงานหน้าชั้นเรียนก่อนที่จะให้นักเรียนทุกคนลองทำพร้อมกัน รวบรวมนักเรียนไว้ในบริเวณเดียวและปล่อยให้มีที่เพียงพอให้สปีดบอทเคลื่อนที่ได้หากวางอยู่บนพื้น
- บอกนักเรียนว่าตอนนี้ถึงคราวที่พวกเขาต้องทำโครงงานแล้ว ตรวจสอบให้แน่ใจว่าพวกเขามีเส้นทางที่ชัดเจน และไม่มีสปีดบอทมาชนกัน
-
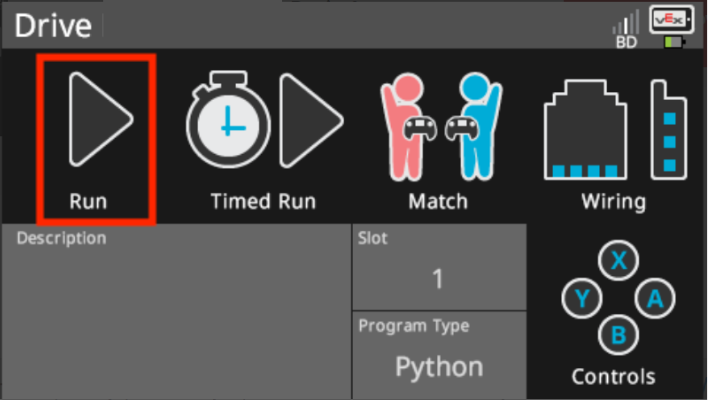
รัน (Python) โปรเจ็กต์บนหุ่นยนต์โดยตรวจสอบให้แน่ใจว่าได้เลือกโปรเจ็กต์แล้ว จากนั้นกดปุ่ม Run บน Robot Brain ขอแสดงความยินดีกับการสร้างโครงการแรกของคุณ!
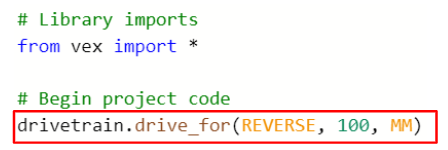
ขั้นตอนที่ 4: ขับถอยหลัง
ตอนนี้คุณได้ตั้งโปรแกรมหุ่นยนต์ของคุณให้ขับเคลื่อนไปข้างหน้าแล้ว ให้เราตั้งโปรแกรมให้หุ่นยนต์ขับเคลื่อนถอยหลัง
-
เปลี่ยนพารามิเตอร์ในคำสั่ง drive_for เพื่อแสดง REVERSE แทน FORWARD
-
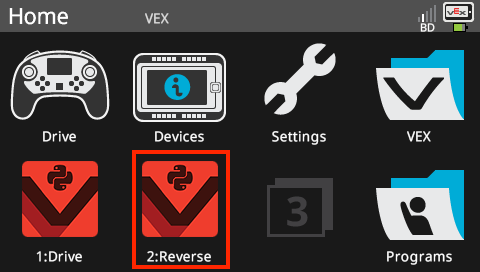
เลือกชื่อโครงการเพื่อเปลี่ยนจาก ไดรฟ์ เป็น ย้อนกลับ

-
เลือกไอคอนช่องเพื่อเลือกช่องใหม่ เลือกช่องที่ 2

-
ดาวน์โหลด (ใน Python) โครงการ
-
ตรวจสอบเพื่อให้แน่ใจว่าโปรเจ็กต์ของคุณมีการดาวน์โหลด (ใน Python) โดยดูที่หน้าจอของ Robot Brain ชื่อโปรเจ็กต์ Reverse ควรแสดงอยู่ใน Slot 2
-
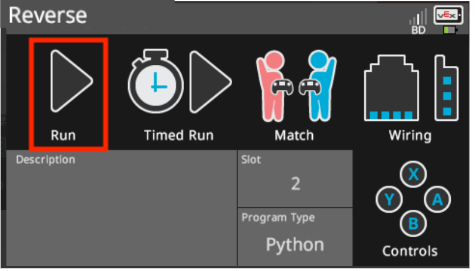
รัน (ใน Python) โปรเจ็กต์บนหุ่นยนต์โดยตรวจสอบให้แน่ใจว่าได้เลือกโปรเจ็กต์แล้ว จากนั้นกดปุ่ม Run บน Robot Brain
![]() กล่องเครื่องมือสำหรับครู
-
เสร็จสิ้นขั้นตอนที่ 4
กล่องเครื่องมือสำหรับครู
-
เสร็จสิ้นขั้นตอนที่ 4
- หากต้องการเปลี่ยนคำสั่ง drive_for จาก ไปข้างหน้า เป็น ย้อนกลับเพียงเปลี่ยนพารามิเตอร์แรกเป็น REVERSE ซึ่งจะทำให้มอเตอร์ในระบบขับเคลื่อนเคลื่อนที่ไปในทิศทางตรงกันข้าม
- จำนวน มม. สามารถเปลี่ยนแปลงได้ แต่สำหรับตัวอย่างนี้ เราจะปล่อยให้มันอยู่ที่ 100 มม. ตามที่ตั้งไว้ในขั้นตอนก่อนหน้า
- เตือนให้นักเรียนถอดสาย USB ออกจาก Robot Brain ก่อนดำเนินโครงการ
- เตือนนักเรียนให้บันทึกโครงงานของตนขณะทำงาน ส่วน Python จาก VEX Library อธิบายแนวทางปฏิบัติในการบันทึกใน VEXcode V5
ขั้นตอนที่ 5: รอแล้วขับถอยหลัง
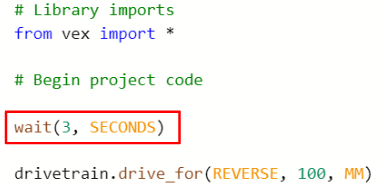
ตอนนี้เราได้ตั้งโปรแกรมให้หุ่นยนต์ขับไปข้างหน้าแล้วถอยหลัง ตอนนี้เราสามารถเพิ่มคำสั่ง รอ เพื่อให้หุ่นยนต์รอระยะเวลาหนึ่งก่อนจะขับถอยหลัง
-
เพิ่มคำสั่งรอตามที่แสดง ซึ่งจะบอกให้หุ่นยนต์รอสามวินาทีก่อนจะขับถอยหลัง
-
เลือกชื่อโปรเจ็กต์เพื่อเปลี่ยนจาก Reverse เป็น WaitReverse
-
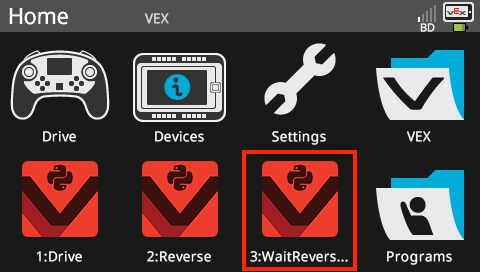
เลือกไอคอนช่องเพื่อเลือกช่องใหม่ เลือกช่องที่ 3

-
ดาวน์โหลด (ใน Python) โครงการ

-
ตรวจสอบเพื่อให้แน่ใจว่าโปรเจ็กต์ของคุณมีการดาวน์โหลด (ใน Python) โดยดูที่หน้าจอของ Robot Brain ชื่อโปรเจ็กต์ WaitReverse ควรแสดงอยู่ใน Slot 3
-
รัน (ใน Python) โปรเจ็กต์บนหุ่นยนต์โดยตรวจสอบให้แน่ใจว่าได้เลือกโปรเจ็กต์แล้ว จากนั้นกดปุ่ม Run

![]() กล่องเครื่องมือสำหรับครู
-
เสร็จสิ้นขั้นตอนที่ 5
กล่องเครื่องมือสำหรับครู
-
เสร็จสิ้นขั้นตอนที่ 5
- การใช้คำสั่ง wait จะไม่สิ้นสุดโปรเจ็กต์ แต่เพียงหยุดการเคลื่อนไหวของหุ่นยนต์ชั่วคราวเท่านั้น
- หากนักเรียนใช้คอมพิวเตอร์ เตือนให้ถอดสาย USB ออกจาก Robot Brain ก่อนดำเนินโครงการ
- เตือนนักเรียนให้บันทึกโครงงานของตนขณะทำงาน ส่วน Python จาก VEX Library อธิบายแนวทางปฏิบัติในการบันทึกใน VEXcode V5
ขั้นตอนที่ 6: ทำภารกิจท้าทายการฝึกซ้อมบาสเก็ตบอลให้สำเร็จ!
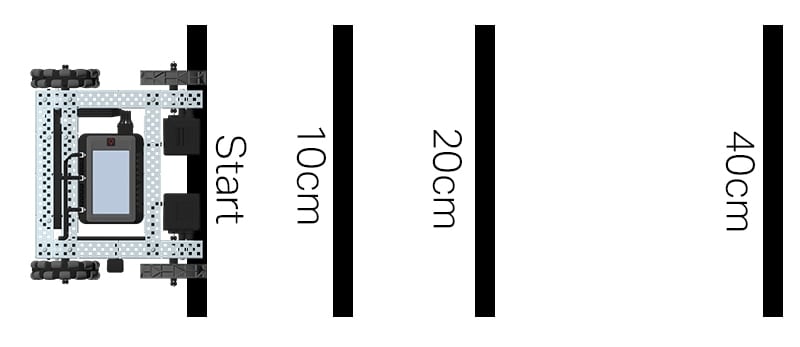
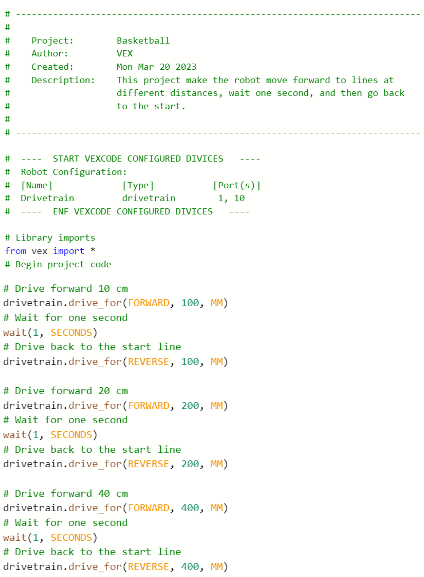
ในการแข่งขัน Basketball Drills Challenge หุ่นยนต์จะต้องสามารถนำทางชุดของเส้นในระยะทางที่ต่างกันได้ หุ่นยนต์จะเคลื่อนที่ไปข้างหน้าไปยังเส้นแรกซึ่งอยู่ห่างจากตำแหน่งเริ่มต้น 10 ซม. รอ 1 วินาที จากนั้นเดินทางย้อนกลับกลับไปยังเส้นเดิม หุ่นยนต์จะทำซ้ำการกระทำโดยขับไปข้างหน้า 20 ซม. ไปยังเส้นที่สอง รอ 1 วินาที จากนั้นขับถอยหลังไปยังเส้นสตาร์ทเดิม หุ่นยนต์จะขับไปข้างหน้าถึงเส้นที่สามด้วยระยะ 40 ซม. รอ 1 วินาที แล้วจึงกลับสู่เส้นเริ่มต้นในที่สุดเพื่อสิ้นสุดการท้าทาย
ก่อนที่จะตั้งโปรแกรมหุ่นยนต์ ให้วางแผนเส้นทางและพฤติกรรมของหุ่นยนต์ในสมุดบันทึกทางวิศวกรรมของคุณ
หลังจากเสร็จสิ้นการแข่งขันบาสเก็ตบอล คุณจะสามารถผสมผสานการเคลื่อนไหวไปข้างหน้าและย้อนกลับเข้ากับพฤติกรรมของหุ่นยนต์เพิ่มเติมเพื่อบรรลุความท้าทายขั้นสูงยิ่งขึ้น
โปรดคำนึงถึงเมื่อตั้งโปรแกรมที่ 1 ซม. = 10 มม.
![]() กล่องเครื่องมือครู
-
หยุดและอภิปราย
กล่องเครื่องมือครู
-
หยุดและอภิปราย
ขอให้นักเรียนแบ่งปันวิธีแก้ปัญหาเป็นคู่ก่อนที่จะอภิปรายกันทั้งชั้น อำนวยความสะดวกในการอภิปรายโดยถาม:
- คุณประสบปัญหาใด ๆ ในขณะที่ตั้งโปรแกรมการท้าทายนี้หรือไม่?
- หุ่นยนต์ของคุณมีพฤติกรรมเหมือนที่คุณคาดหวังตามโครงการของคุณหรือไม่? ทำไมหรือทำไมไม่?
- หากคุณสามารถเอาชนะความท้าทายได้ มีอะไรที่คุณจะทำแตกต่างออกไปหรือไม่?
![]() กล่องเครื่องมือครู
-
วิธีแก้ปัญหา
กล่องเครื่องมือครู
-
วิธีแก้ปัญหา