![]() Strumenti per l'insegnante
-
Schema delle attività
Strumenti per l'insegnante
-
Schema delle attività
Questa esplorazione introdurrà gli studenti ai comportamenti base di programmazione in avanti, all'indietro e in attesa. Queste abilità di base li aiuteranno ad avere successo nell'attività successiva e nella Strike Challenge alla fine di questo STEM Lab, quando gareggeranno nel bowling utilizzando lo Speedbot.
L'utilizzo del progetto modello V5 Speedbot (Drivetrain 2-motor, No Gyro) consente agli studenti di programmare lo Speedbot per andare avanti utilizzando una sola istruzione.
Lo Speedbot è pronto a muoversi!
Questa esplorazione ti fornirà gli strumenti per poter programmare il tuo Speedbot per movimenti semplici. Alla fine di questa attività, ti impegnerai nella Basketball Drills Challenge utilizzando comportamenti di avanzamento, inversione e attesa.
![]() Casella degli strumenti per l'insegnante
Casella degli strumenti per l'insegnante
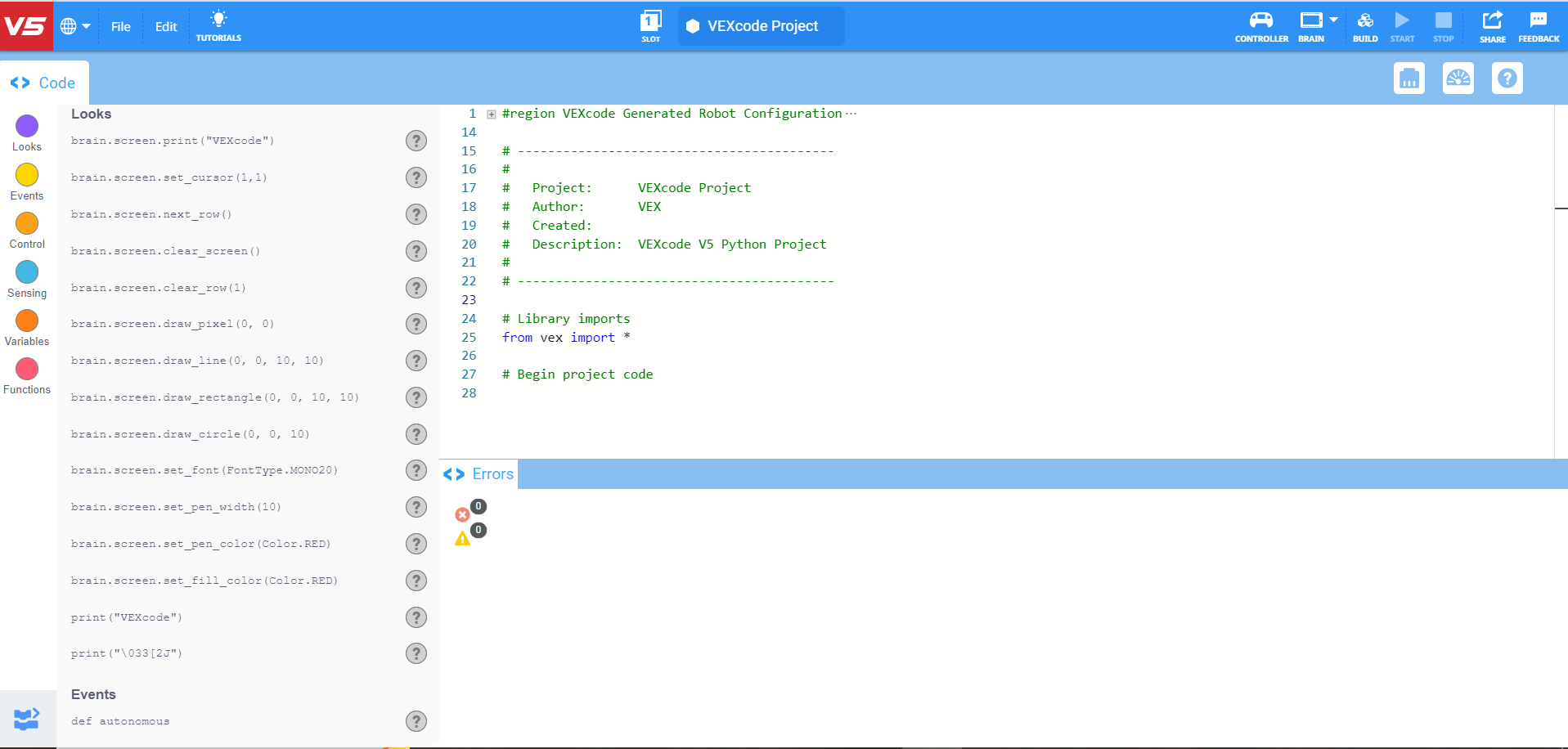
Ecco una panoramica dell'interfaccia utente di VEXcode V5. Gli studenti verranno introdotti a queste schede/pulsanti durante le attività in questo Momentum Alley STEM Lab. Sono inoltre forniti collegamenti in tutto il Laboratorio STEM per fornire ulteriori informazioni su queste schede/pulsanti.
-
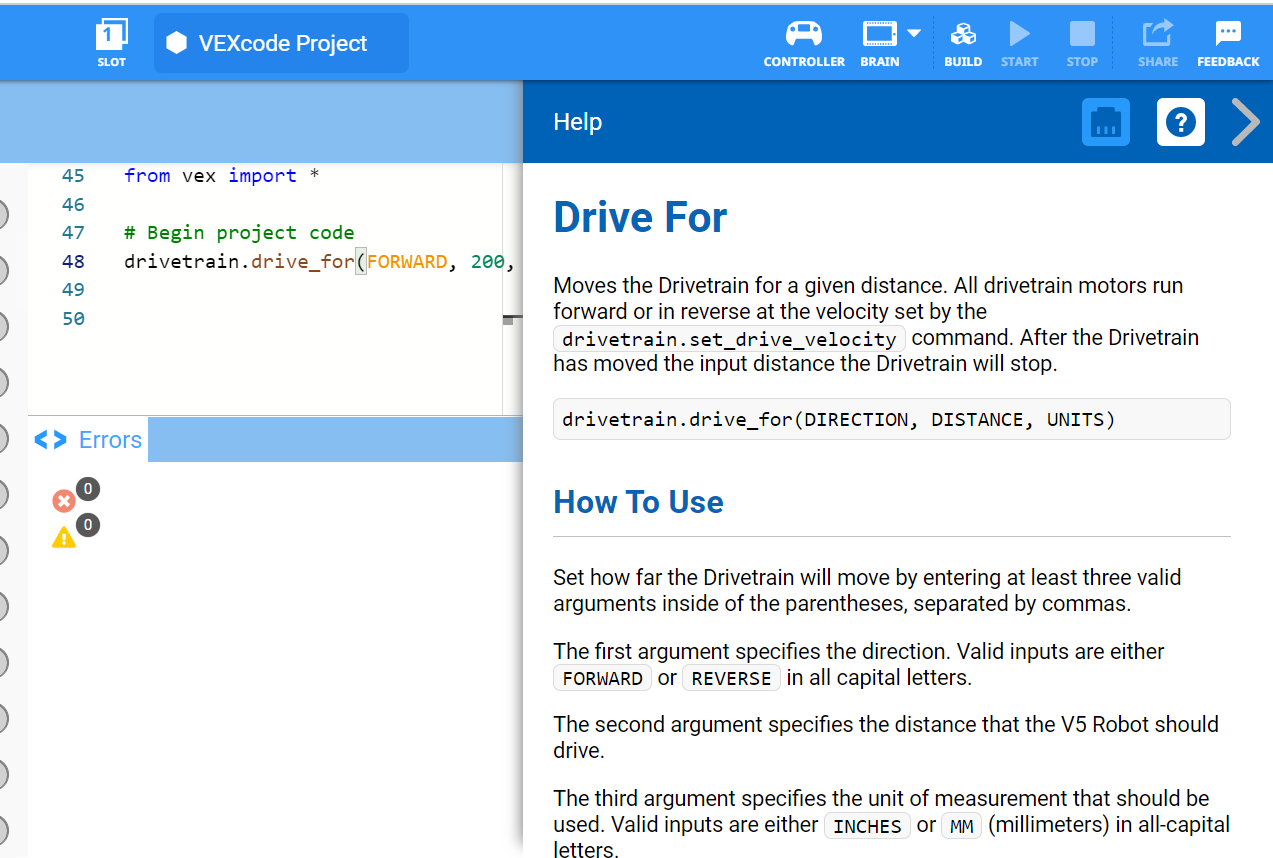
Istruzioni VEXcode V5 Python che verranno utilizzate in questa esplorazione:
-
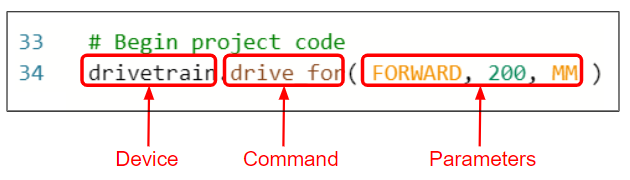
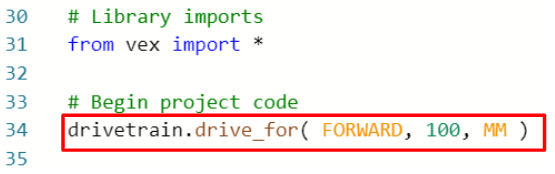
drivetrain.drive_for(AVANTI, 200, MM)
-
attendere(1, secondi)
-
-
Per trovare ulteriori informazioni sull'istruzione, seleziona Guida, quindi seleziona l'icona del punto interrogativo accanto a un comando per visualizzare ulteriori informazioni.
-
Assicurati di avere l'hardware richiesto, il tuo notebook di ingegneria e VEXcode V5 scaricato e pronto.
![]() Suggerimenti per gli insegnanti
Suggerimenti per gli insegnanti
Se è la prima volta che lo studente utilizza VEXcode V5, può fare riferimento ai tutorial in qualsiasi momento durante questa esplorazione.

| Quantità | Materiale necessario |
|---|---|
| 1 |
Robot robot veloce |
| 1 |
Batteria del robot carica |
| 1 |
Codice VEX V5 |
| 1 |
Cavo USB (se si utilizza un computer) |
| 1 |
Quaderno di ingegneria |
![]() Suggerimenti per gli insegnanti
Suggerimenti per gli insegnanti
Modellare ciascuno dei passaggi di risoluzione dei problemi per gli studenti.
Passo 1: Preparazione per l'esplorazione
Prima di iniziare l'attività, hai ciascuno di questi elementi pronti? Controlla ciascuno dei seguenti elementi:
-
Gli smart cable sono completamente inseriti in tutti i motori?
-
Il Brain è acceso?
-
La batteria è carica?
Passaggio 2: Inizia un nuovo progetto
Completa i seguenti passaggi per iniziare il progetto:
-
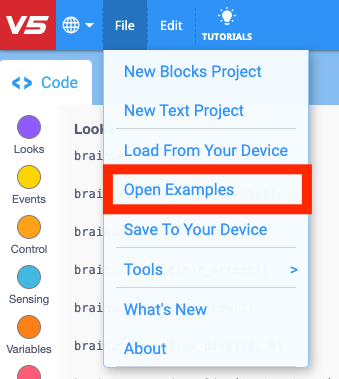
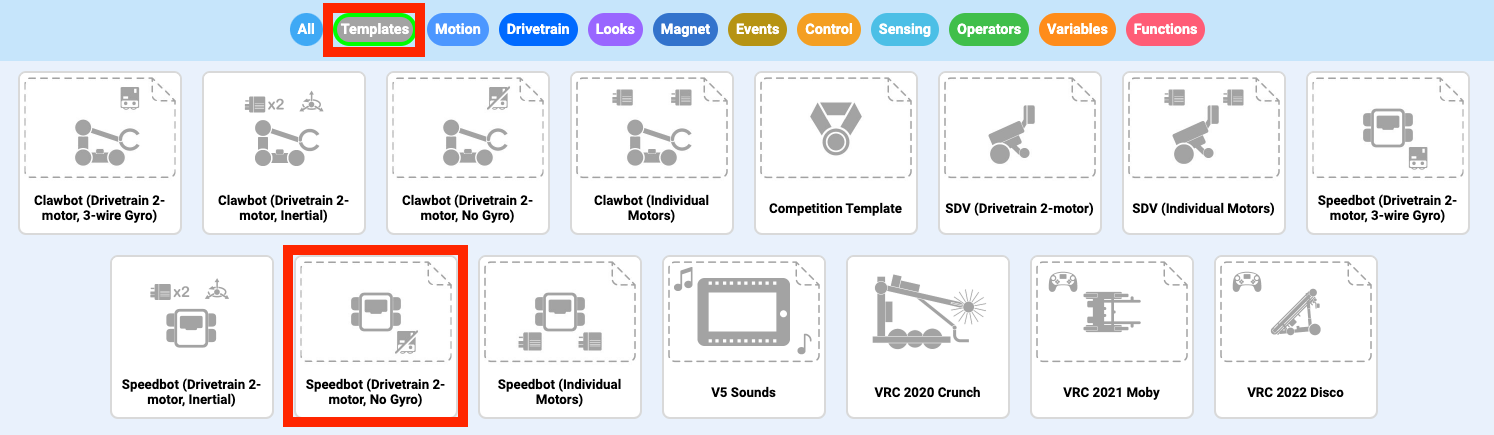
Apri il menu File e seleziona Apri esempi.
-
Seleziona e apri il progetto modello Speedbot (Drivetrain 2-motor, No Gyro). Il progetto modello contiene la configurazione del motore dello Speedbot. Se il modello non viene utilizzato, il tuo robot non eseguirà correttamente il progetto.
-
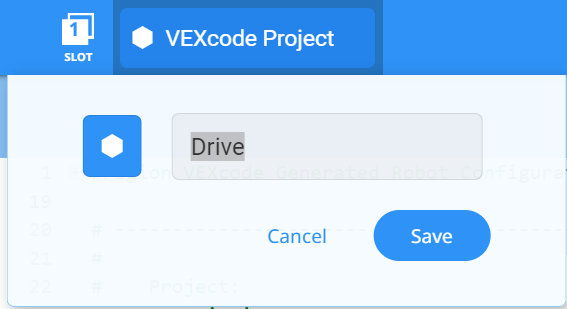
Poiché lavorerai per spostare lo Speedbot in avanti e all'indietro, chiamerai il tuo progetto Drive. Seleziona il nome del progetto, digita "Drive" e quindi seleziona "Salva".
![]() Suggerimenti per gli insegnanti
Suggerimenti per gli insegnanti
-
I nomi dei progetti possono contenere spazi tra o dopo le parole.

-
Puoi chiedere agli studenti di aggiungere le loro iniziali o il nome del loro gruppo al nome del progetto. Ciò aiuterà a differenziare i progetti se chiedi agli studenti di presentarli.
-
Poiché questa è la prima attività di programmazione che i tuoi studenti potrebbero tentare, dovresti modellare i passaggi e poi chiedere agli studenti di completare le stesse azioni. L'insegnante dovrebbe quindi monitorare gli studenti per assicurarsi che stiano seguendo i passaggi correttamente.
-
Assicurati che gli studenti abbiano selezionato Apri esempi dal menu File.
-
Assicurati che gli studenti abbiano selezionato il progetto modello Speedbot (Drivetrain 2-motor, No Gyro).
-
Puoi far notare agli studenti che ci sono diverse selezioni tra cui scegliere nella pagina Esempi. Man mano che costruiscono e utilizzano altri robot, avranno la possibilità di utilizzare modelli diversi.
-
Controlla che il nome del progetto Drive sia ora nella finestra al centro della barra degli strumenti.

![]() Strumenti dell'insegnante
-
Salvataggio di progetti
Strumenti dell'insegnante
-
Salvataggio di progetti
-
Sottolinea che quando hanno aperto VEXcode V5 per la prima volta, la finestra era etichettata VEXcode Project. VEXcode Project è il nome del progetto predefinito quando VEXcode V5 viene aperto per la prima volta. Una volta rinominato il progetto Drive e salvato, il display è stato aggiornato per mostrare il nuovo nome del progetto. Utilizzando questa finestra nella barra degli strumenti, è facile verificare che gli studenti stiano utilizzando il progetto corretto.
-
Spiega agli studenti che ora sono pronti per iniziare il loro primo progetto. Spiega agli studenti che seguendo pochi semplici passaggi saranno in grado di creare ed eseguire un progetto che farà avanzare lo Speedbot.
-
Ricorda agli studenti di salvare i loro progetti mentre lavorano. Le sezioni Python della Libreria VEX spiegano le pratiche di salvataggio in VEXcode V5.
![]() Strumenti dell'insegnante
-
Fermati e discuti
Strumenti dell'insegnante
-
Fermati e discuti
Questo è un buon punto per fare una pausa e chiedere agli studenti di rivedere i passaggi appena completati all'avvio di un nuovo progetto in VEXcode V5 individualmente o in gruppi. Chiedi agli studenti di riflettere individualmente prima di condividere con il loro gruppo o con l'intera classe.
Passaggio 3: Vai avanti
Ora sei pronto per iniziare a programmare il robot per andare avanti!
-
Prima di iniziare a programmare, dobbiamo capire cos'è un'istruzione. Ci sono tre parti in un'istruzione. Per ulteriori informazioni sulla colorazione del codice in VEXcode V5 Python, vedere questo articolo.
-
Aggiungi l'istruzione al progetto:
![]() Suggerimenti per gli insegnanti
Suggerimenti per gli insegnanti
Potresti notare una funzione di completamento automatico quando inizi a digitare l'istruzione. Utilizza i tasti "Su" e "Giù" per selezionare il nome desiderato, quindi premi "Tab" o (Invio/Invio) sulla tastiera per effettuare la selezione. Per ulteriori informazioni su questa funzionalità consulta l'articolo Python. 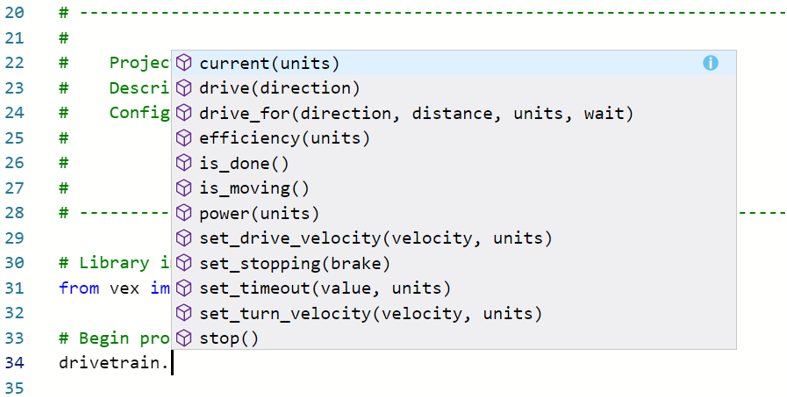
-
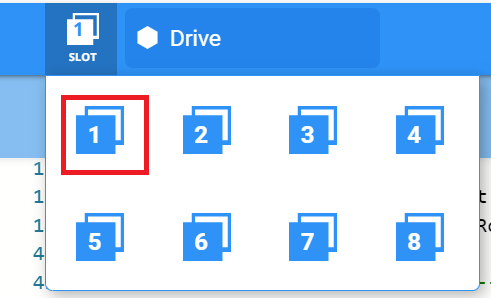
Seleziona l'icona Slot per scegliere uno degli otto slot disponibili sul Robot Brain e seleziona lo slot 1.
-
Collega il cervello robot V5 al computer utilizzando un cavo micro USB e accendi il cervello robot V5. L'icona Cervello nella barra degli strumenti diventa verde una volta stabilita una connessione riuscita.

-
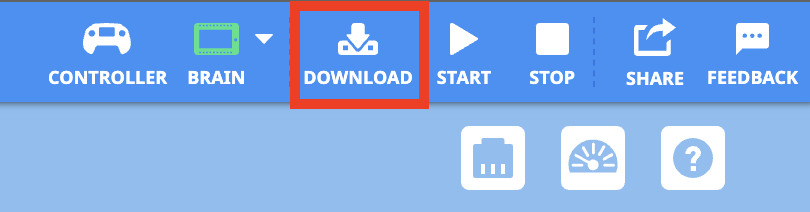
Selezionare Download per scaricare il progetto su Brain.

![]() Casella degli strumenti per l'insegnante
Casella degli strumenti per l'insegnante
Ricordare agli studenti di scollegare il cavo USB dal cervello del robot. Se il robot è collegato a un computer durante l'esecuzione di un progetto, il robot potrebbe tirare il cavo di connessione.
![]() Strumenti dell'insegnante
-
Fermati e discuti
Strumenti dell'insegnante
-
Fermati e discuti
Chiedi agli studenti di prevedere cosa pensano che accadrà quando il progetto verrà scaricato ed eseguito sullo Speedbot. Chiedi agli studenti di registrare le loro previsioni sui loro quaderni di ingegneria. Se il tempo lo consente, chiedi a ciascun gruppo di condividere la propria previsione.
-
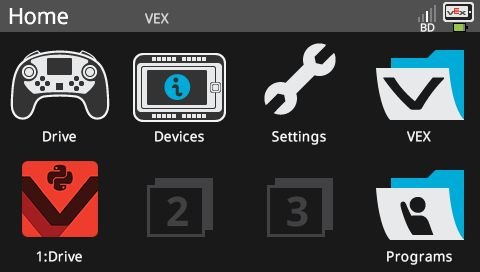
Assicurati che il tuo progetto sia stato scaricato guardando lo schermo del cervello robotico. Il nome del progetto Drive dovrebbe essere elencato nello Slot 1.
![]() Casella degli strumenti per l'insegnante
-
Primo modello
Casella degli strumenti per l'insegnante
-
Primo modello
- Modella l'esecuzione del progetto davanti alla classe prima di far provare a tutti gli studenti contemporaneamente. Riunisci gli studenti in un'area e lascia spazio sufficiente affinché lo Speedbot possa muoversi se è posizionato sul pavimento.
- Spiega agli studenti che ora è il loro turno di portare avanti il loro progetto. Assicurati che abbiano un percorso libero e che nessuno Speedbot si incontri.
-
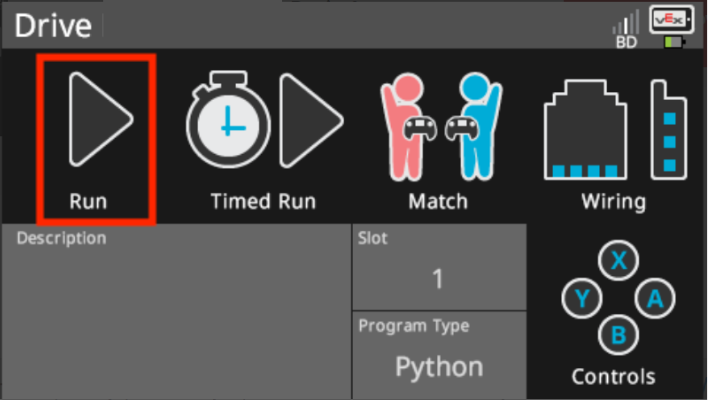
Esegui (Python) il progetto sul robot assicurandoti che il progetto sia selezionato, quindi premi il pulsante Esegui sul cervello del robot. Congratulazioni per aver creato il tuo primo progetto!
Passaggio 4: Guida in retromarcia
Ora che hai programmato il tuo robot per andare avanti, programmiamolo ora per andare in retromarcia.
-
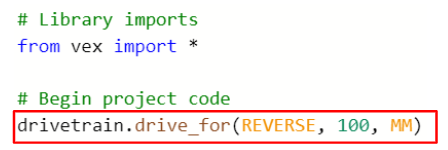
Modificare il parametro nell'istruzione drive_for per visualizzare REVERSE invece di FORWARD.
-
Selezionare il nome del progetto per modificarlo da Drive a Reverse.

-
Seleziona l'icona Slot per scegliere un nuovo slot. Seleziona lo spazio 2.

-
Scarica (in Python) il progetto.
-
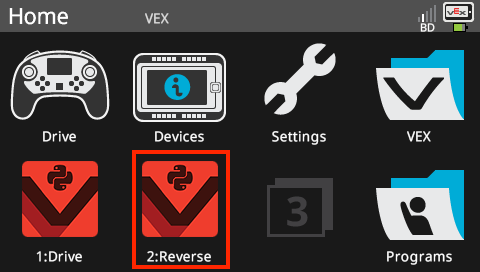
Assicurati che il tuo progetto sia stato scaricato (in Python) guardando lo schermo del cervello del robot. Il nome del progetto Reverse dovrebbe essere elencato nello Slot 2.
-
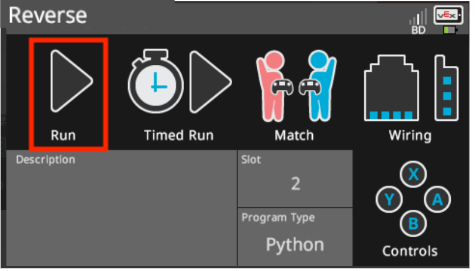
Esegui (in Python) il progetto sul robot assicurandoti che il progetto sia selezionato, quindi premi il pulsante Esegui sul cervello del robot.
![]() Casella degli strumenti per l'insegnante
-
Completamento del passaggio 4
Casella degli strumenti per l'insegnante
-
Completamento del passaggio 4
- Per modificare il comando drive_for da forward a reverse, è sufficiente modificare il primo parametro in REVERSE. In questo modo i motori della trasmissione si muoveranno nella direzione opposta.
- Il numero di mm può essere modificato, ma per questo esempio li lasceremo a 100 mm come impostato nel passaggio precedente.
- Ricordare agli studenti di scollegare il cavo USB dal cervello del robot prima di eseguire il progetto.
- Ricorda agli studenti di salvare i loro progetti mentre lavorano. Le sezioni Python della Libreria VEX spiegano le pratiche di salvataggio in VEXcode V5.
Passaggio 5: Attendere, quindi guidare in retromarcia
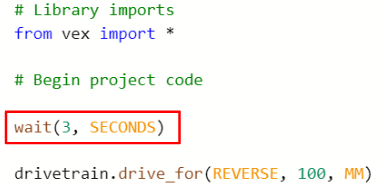
Ora che abbiamo programmato il robot per andare avanti e poi in retromarcia, possiamo aggiungere un'istruzione wait in modo che il robot aspetti un certo periodo di tempo prima di andare in retromarcia.
-
Aggiungi un'istruzione di attesa come mostrato. Ciò dice al robot di attendere tre secondi prima di procedere in retromarcia.
-
Seleziona il nome del progetto per cambiarlo da Reverse a WaitReverse.
-
Seleziona l'icona Slot per scegliere un nuovo slot. Seleziona lo spazio 3.

-
Scarica (in Python) il progetto.

-
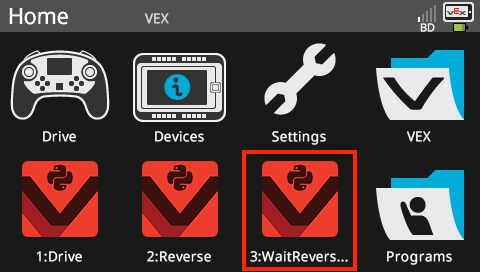
Assicurati che il tuo progetto sia stato scaricato (in Python) guardando lo schermo del cervello del robot. Il nome del progetto WaitReverse dovrebbe essere elencato nello Slot 3.
-
Esegui (in Python) il progetto sul robot assicurandoti che il progetto sia selezionato e quindi premi il pulsante Esegui .

![]() Casella degli strumenti per l'insegnante
-
Completamento del passaggio 5
Casella degli strumenti per l'insegnante
-
Completamento del passaggio 5
- L'uso del comando wait non terminerà il progetto, ma metterà solo in pausa il movimento robotico.
- Se gli studenti utilizzano un computer, ricorda loro di scollegare il cavo USB da Robot Brain prima di eseguire il progetto.
- Ricorda agli studenti di salvare i loro progetti mentre lavorano. La sezione Python della Libreria VEX spiega le pratiche di salvataggio in VEXcode V5.
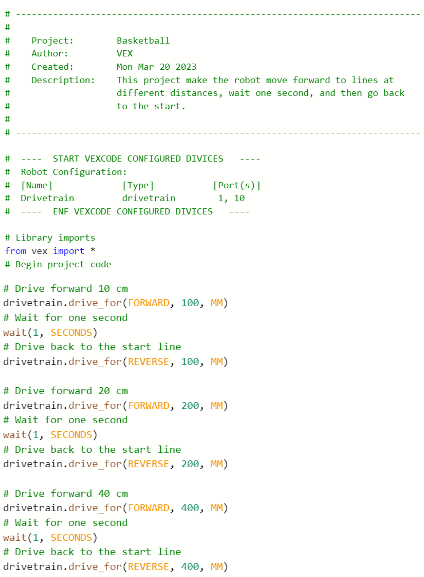
Passo 6: Completa la sfida degli esercizi di basket!
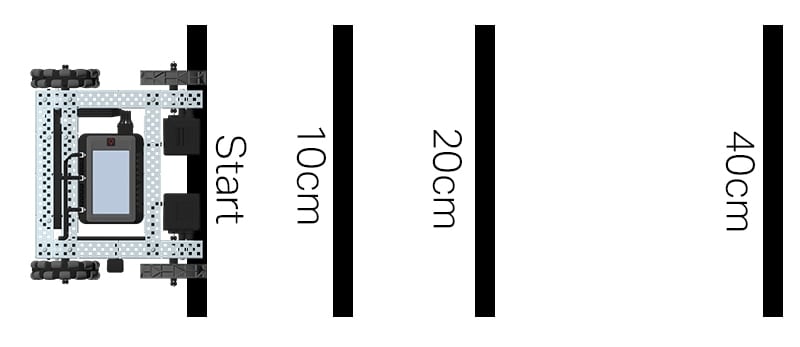
Nella Basketball Drills Challenge, il robot deve essere in grado di percorrere una serie di linee a diverse distanze. Il robot si sposterà in avanti fino alla prima linea che si trova a 10 cm dalla posizione iniziale, attenderà 1 secondo, quindi viaggerà all'indietro ritornando sulla stessa linea. Il robot ripeterà quindi l'azione avanzando di 20 cm fino alla seconda linea, attendendo 1 secondo, quindi tornando indietro fino alla linea di partenza originale. Il robot avanzerà fino alla terza linea con una distanza di 40 cm, attenderà 1 secondo e infine tornerà alla linea di partenza per terminare la sfida.
Prima di programmare il robot, pianifica il percorso e i comportamenti del robot nel tuo taccuino di ingegneria.
Dopo aver completato la sfida di basket, potrai combinare i movimenti in avanti e all'indietro con comportamenti aggiuntivi del robot per completare sfide ancora più avanzate.
Tenere presente durante la programmazione che 1 cm = 10 mm.
![]() Strumenti dell'insegnante
-
Fermati e discuti
Strumenti dell'insegnante
-
Fermati e discuti
Chiedi agli studenti di condividere le loro soluzioni in coppie prima di discuterle con l'intera classe. Facilitare la discussione chiedendo:
- Hai incontrato difficoltà durante la programmazione di questa sfida?
- Il tuo robot si è comportato come ti aspettavi in base al tuo progetto? Perché o perché no?
- Se potessi ripetere la sfida, c'è qualcosa che avresti fatto diversamente?
![]() Casella degli strumenti per l'insegnante
-
Soluzione
Casella degli strumenti per l'insegnante
-
Soluzione