![]() 教师工具箱
-
活动大纲
教师工具箱
-
活动大纲
这次探索将向学生介绍基本的前进、后退和等待编程行为。 这些基本技能将帮助他们在下一个活动和本 STEM 实验室结束时的 Strike Challenge 中取得成功,届时他们将使用 Speedbot 参加保龄球比赛。
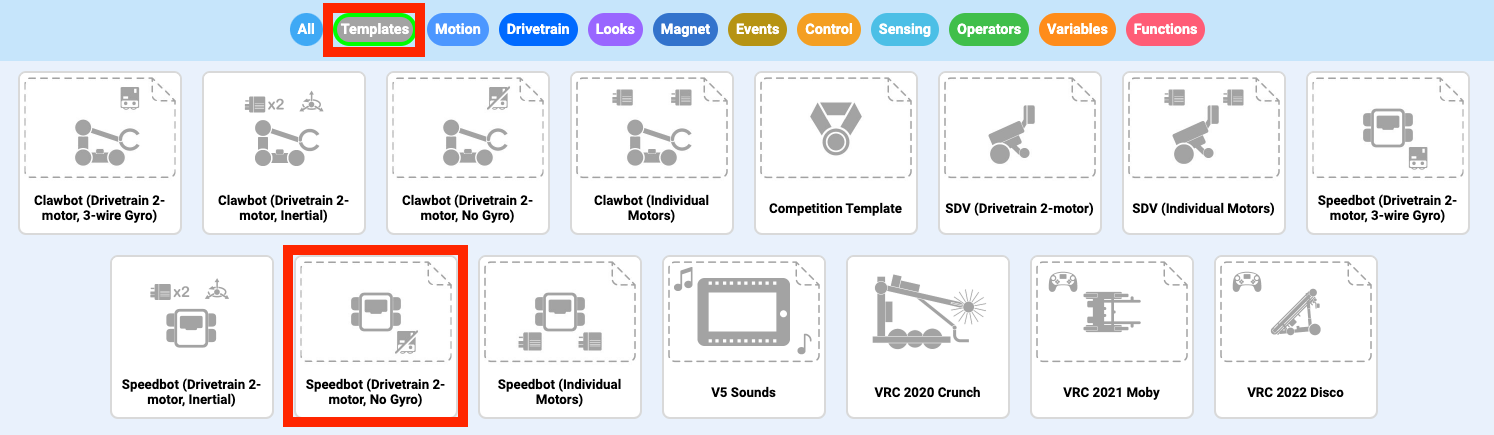
使用 V5 Speedbot(动力传动系统 2 马达,无陀螺仪)模板项目,学生只需使用一条指令即可对 Speedbot 进行编程以使其向前移动。
Speedbot 已准备好移动!
这次探索将为您提供对 Speedbot 进行编程以实现简单动作的工具。 在本活动结束时,您将使用前进、后退和等待行为参与篮球训练挑战。
![]() 教师工具箱
教师工具箱
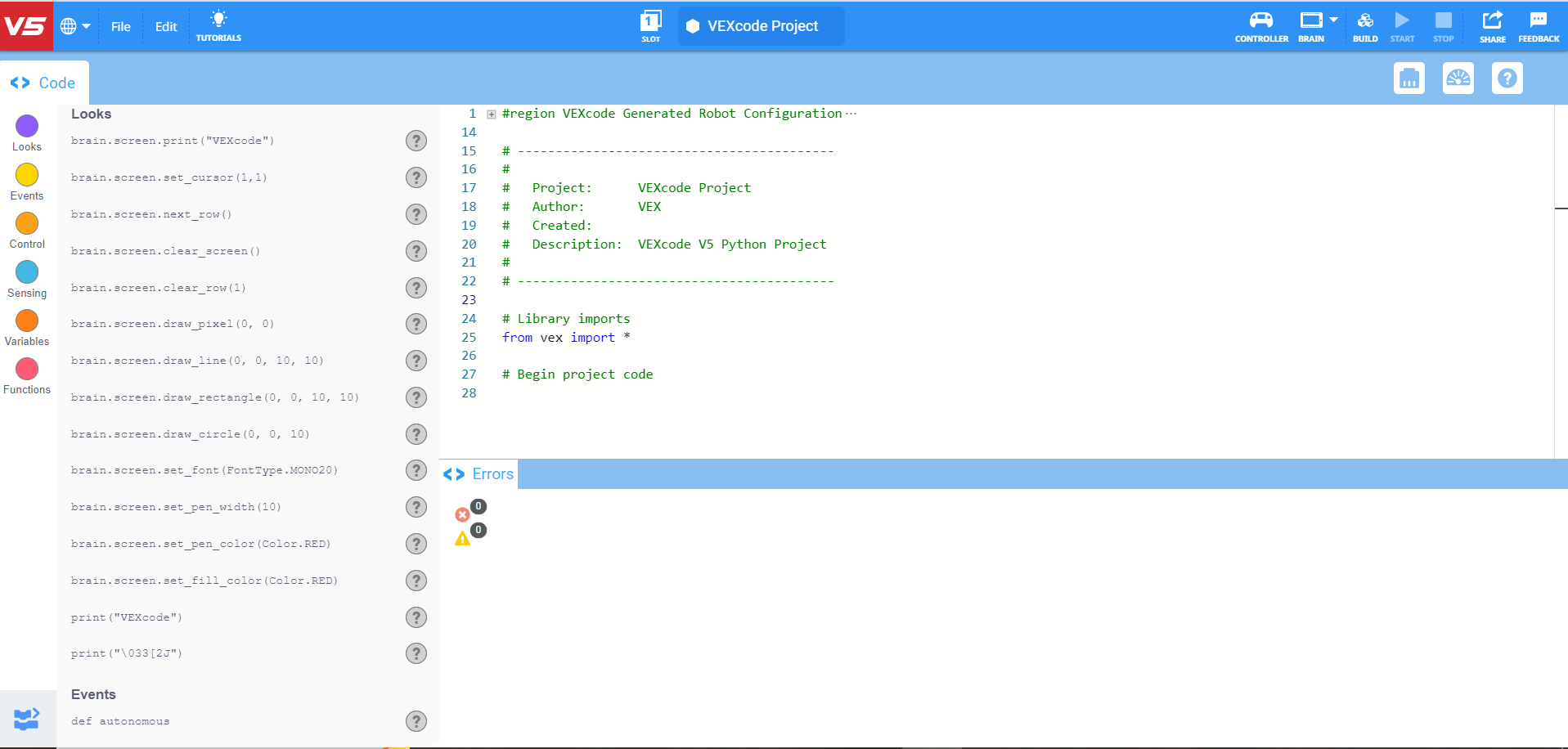
以下是 VEXcode V5 用户界面的概述。 学生将在 Momentum Alley STEM Lab 的活动中了解这些标签/按钮。 整个 STEM 实验室还提供链接来提供有关这些选项卡/按钮的更多信息。
-
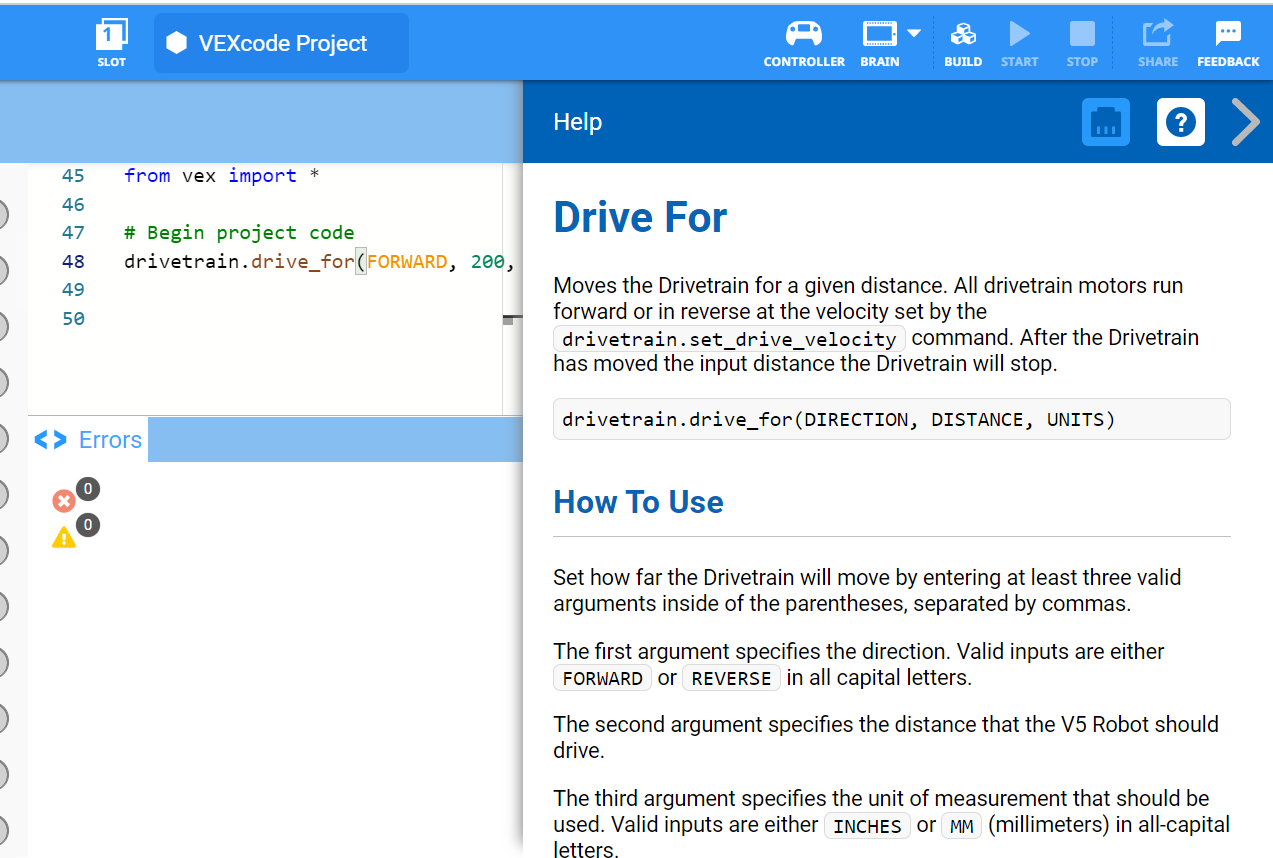
本次探索将使用 VEXcode V5 Python 指令:
-
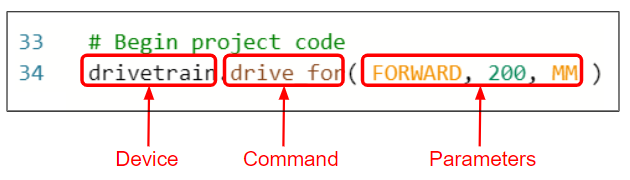
传动系统.drive_for(前进,200,MM)
-
等待(1,秒)
-
-
要了解有关该指令的更多信息,请选择“帮助”,然后选择命令旁边的问号图标以查看更多信息。
-
确保您拥有所需的硬件、工程笔记本,并且已下载并准备好 VEXcode V5。
![]() 教师提示
教师提示
如果这是学生第一次使用 VEXcode V5,他们可以在探索过程中随时参考教程。

| 数量 | 所需材料 |
|---|---|
| 1 |
Speedbot 机器人 |
| 1 |
充电机器人电池 |
| 1 |
VEX代码 V5 |
| 1 |
USB 电缆(如果使用电脑) |
| 1 |
工程笔记本 |
![]() 教师提示
教师提示
为学生示范每一个故障排除步骤。
步骤 2: 开始新项目
完成以下步骤来开始该项目:
-
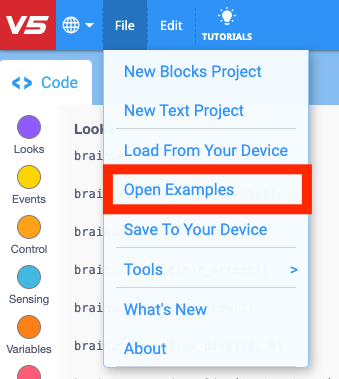
打开文件菜单并选择打开示例。
-
选择并打开 Speedbot(传动系统 2 电机,无陀螺仪)模板项目。 模板项目包含 Speedbot 的 电机配置。 如果不使用模板,您的机器人将无法正确运行项目。
-
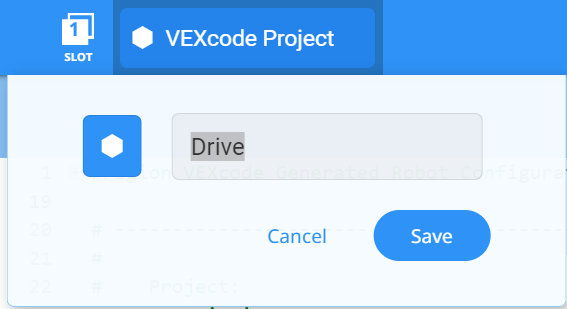
由于您将致力于让 Speedbot 前进和后退,因此您将项目命名为 Drive。 选择项目名称,输入“驱动器” ,然后选择“保存”。
![]() 教师提示
教师提示
-
项目名称的单词之间或单词后可以有空格。

-
您可以要求学生在项目名称中添加他们的姓名首字母或小组名称。 如果您要求学生提交项目,这将有助于区分它们。
-
因为这是学生可能尝试的第一个编程活动,所以您应该模拟这些步骤,然后要求学生完成相同的操作。 然后,老师应该监督学生,以确保他们正确地遵循这些步骤。
-
确保学生已从文件菜单中选择了打开示例。
-
确保学生选择了 Speedbot(传动系统 2 马达,无陀螺仪)模板项目。
-
您可以向学生指出,示例页面上有多种选择可供选择。 当他们建造和使用其他机器人时,他们将有机会使用不同的模板。
-
检查确保项目名称 Drive 现在位于工具栏中心的窗口中。

![]() 教师工具箱
-
保存项目
教师工具箱
-
保存项目
-
指出,当他们第一次打开 VEXcode V5 时,窗口标记为 VEXcode 项目。 VEXcode Project 是首次打开 VEXcode V5 时的默认项目名称。 一旦将项目重命名为 Drive 并保存,显示屏就会更新以显示新的项目名称。 使用工具栏中的此窗口,可以轻松检查学生是否使用正确的项目。
-
告诉学生他们现在已经准备好开始他们的第一个项目了。 向学生们解释,只需按照几个简单的步骤,他们就能创建并运行一个推动 Speedbot 前进的项目。
-
提醒学生在工作时保存他们的项目。 VEX 库中的 Python 部分 解释了 VEXcode V5 中的保存实践。
![]() 教师工具箱
-
停下来讨论
教师工具箱
-
停下来讨论
这是暂停的好时机,让学生单独或分组回顾一下刚刚完成的在 VEXcode V5 中启动新项目的步骤。 要求学生先进行个人反思,然后再在小组内或全班同学分享。
步骤 3: 向前推进
您现在可以开始对机器人进行编程,使其向前行驶了!
-
在开始编程之前,我们需要了解什么是指令。 一条指令有三个部分。 有关 VEXcode V5 Python 中代码着色的更多信息, 查看此文章。
-
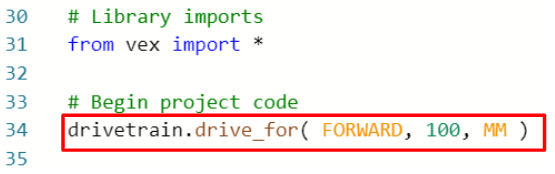
向项目中添加指令:
![]() 教师提示
教师提示
当您开始输入指令时,您可能会注意到自动完成功能。 使用“向上”和“向下”键选择所需的名称,然后按键盘上的“Tab”或(Enter/Return)进行选择。 有关此功能的更多信息,请查看 Python 文章。 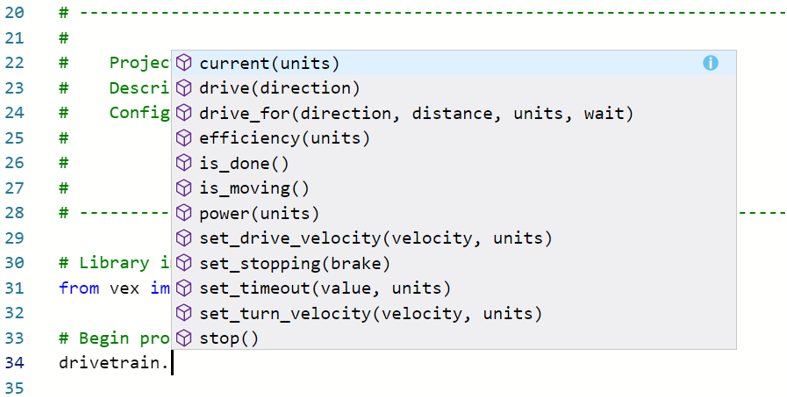
-
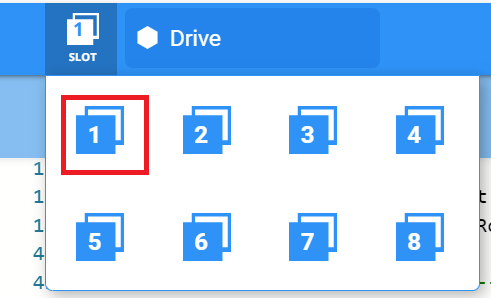
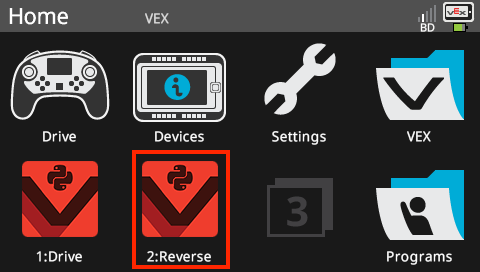
选择插槽图标以选择机器人大脑上八个可用插槽之一,然后选择插槽 1。
-
使用微型 USB 电缆将 V5 机器人大脑连接到计算机,并打开 V5 机器人大脑的电源。 一旦成功连接,工具栏中的 Brain 图标 将变为绿色 。

-
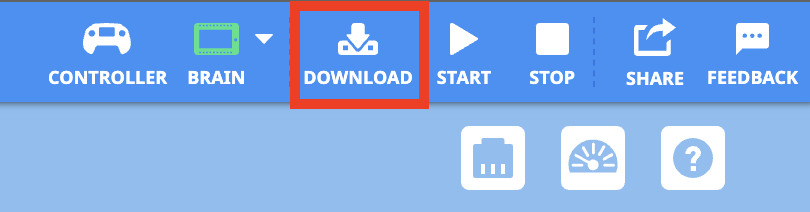
选择 下载 将项目下载到 Brain。

![]() 教师工具箱
教师工具箱
提醒学生断开机器人大脑上的 USB 电缆。 在运行项目时将机器人连接到计算机可能会导致机器人拉动连接线。
![]() 教师工具箱
-
停下来讨论
教师工具箱
-
停下来讨论
让学生预测当该项目下载并在 Speedbot 上运行时会发生什么。 告诉学生将他们的预测记录在他们的工程笔记本中。 如果时间允许,让每个小组分享他们的预测
![]() 教师工具箱
-
模型优先
教师工具箱
-
模型优先
- 在让所有学生同时尝试之前,先在班级面前示范运行该项目。 将学生聚集在一个区域,如果 Speedbot 放在地板上,则要留出足够的移动空间。
- 告诉学生现在轮到他们运行他们的项目了。 确保它们有一条畅通的路径并且没有 Speedbot 会互相碰撞。
-
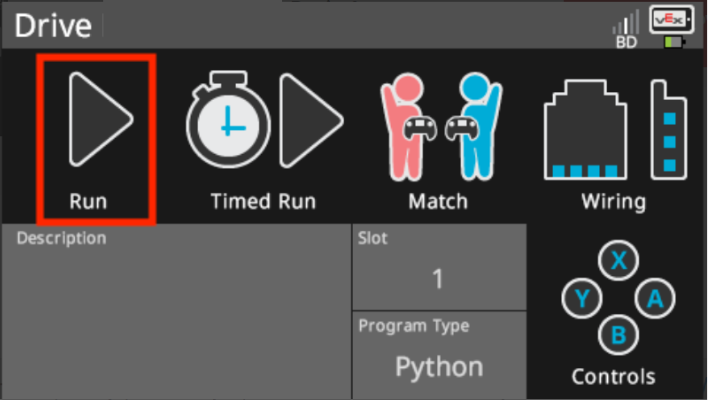
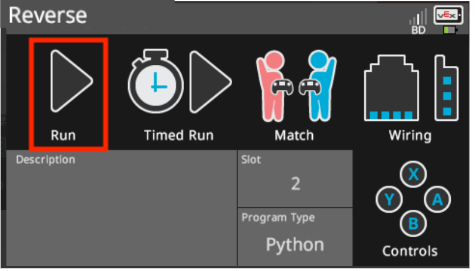
确保选择了项目,在机器人上运行(Python) 该项目,然后按下机器人大脑上的 运行 按钮。 恭喜您创建了您的第一个项目!


![]() 教师工具箱
-
完成第 4 步
教师工具箱
-
完成第 4 步
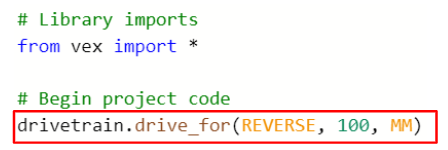
- 要将 drive_for 命令从 forward 更改为 reverse,只需将第一个参数更改为 REVERSE。 这将使传动系统中的电机以相反的方向移动。
- 毫米数可以改变,但在这个例子中,我们将其保留为上一步设置的 100 毫米。
- 提醒学生在运行项目之前断开机器人大脑的 USB 电缆。
- 提醒学生在工作时保存他们的项目。 VEX 库中的 Python 部分解释了 VEXcode V5 中的保存实践。
步骤 5: 然后倒车
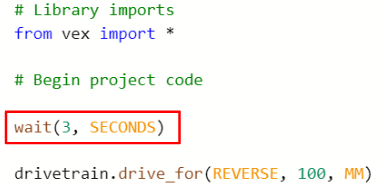
现在我们已经对机器人进行了编程,使其向前行驶然后向后行驶,我们现在可以添加 等待 指令,以便机器人在向后行驶之前等待一段时间。



![]() 教师工具箱
-
完成第 5 步
教师工具箱
-
完成第 5 步
- 使用 等待 命令不会结束项目,它只会暂停机器人运动。
- 如果学生正在使用电脑,请提醒他们在运行项目之前断开 Robot Brain 的 USB 电缆。
- 提醒学生在工作时保存他们的项目。 VEX 库中的 Python 部分解释了 VEXcode V5 中的保存实践。
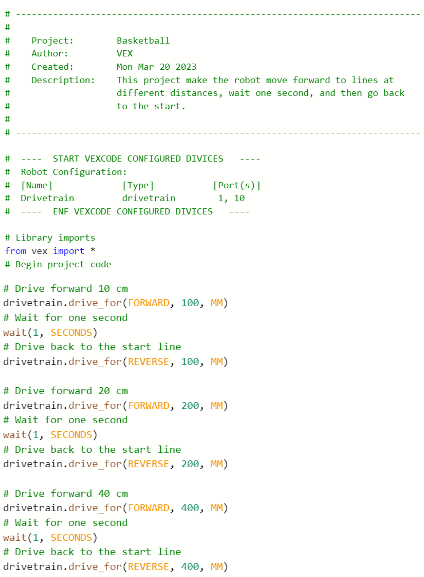
第 6 步: 完成篮球训练挑战!
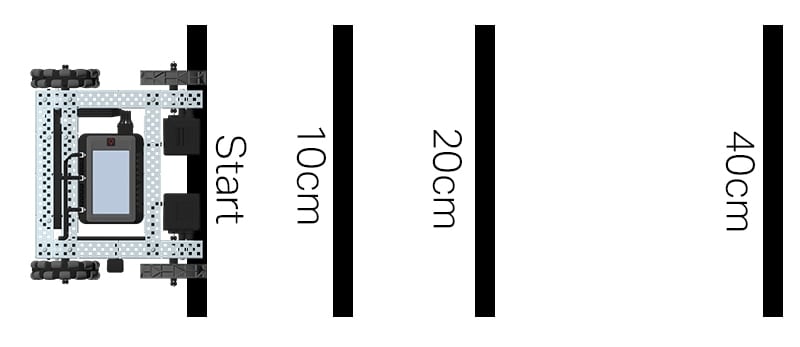
在篮球训练挑战赛中,机器人必须能够沿着一系列不同距离的线路行进。 机器人将向前移动到距起始位置 10 厘米的第一条线,等待 1 秒,然后向后移动回到同一条线。 机器人随后会重复该动作,向前行驶 20 厘米至第二条线,等待 1 秒,再向后行驶至原来的起跑线。 机器人将向前行驶至距离第三条线40厘米处,等待1秒,然后最后返回起跑线,完成挑战。
在对机器人进行编程之前,请先在工程笔记本中规划出机器人的路径和行为。
完成篮球挑战后,您将能够将前进和后退运动与附加机器人行为相结合
时请记住 1 厘米 = 10 毫米。
![]() 教师工具箱
-
停下来讨论
教师工具箱
-
停下来讨论
要求学生两人一组分享他们的解决方案,然后全班讨论。 通过提问来促进讨论:
- 在编写这个挑战程序时你遇到什么困难吗?
- 您的机器人的行为是否符合您根据项目所预期的行为? 为什么或为什么不?
- 如果您可以重新接受这个挑战,您会做哪些不同的事情?
![]() 教师工具箱
-
解决方案
教师工具箱
-
解决方案