![]() Набор инструментов учителя
План занятия
Набор инструментов учителя
План занятия
Это исследование познакомит учащихся с основными моделями поведения при программировании движения вперед, назад и ожидания. Эти базовые навыки помогут им добиться успеха в следующем задании и в соревновании Strike Challenge в конце этой лаборатории STEM, когда они будут соревноваться в боулинге с помощью Speedbot.
Использование шаблонного проекта V5 Speedbot (трансмиссия, 2 двигателя, без гироскопа) позволяет учащимся запрограммировать Speedbot для движения вперед, используя всего одну инструкцию.
Speedbot готов к работе!
Это исследование даст вам инструменты, позволяющие запрограммировать вашего Speedbot на простые движения. В конце этого упражнения вы примете участие в соревновании по баскетбольным упражнениям, используя движения вперед, назад и ожидание.
![]() Инструментарий учителя
Инструментарий учителя
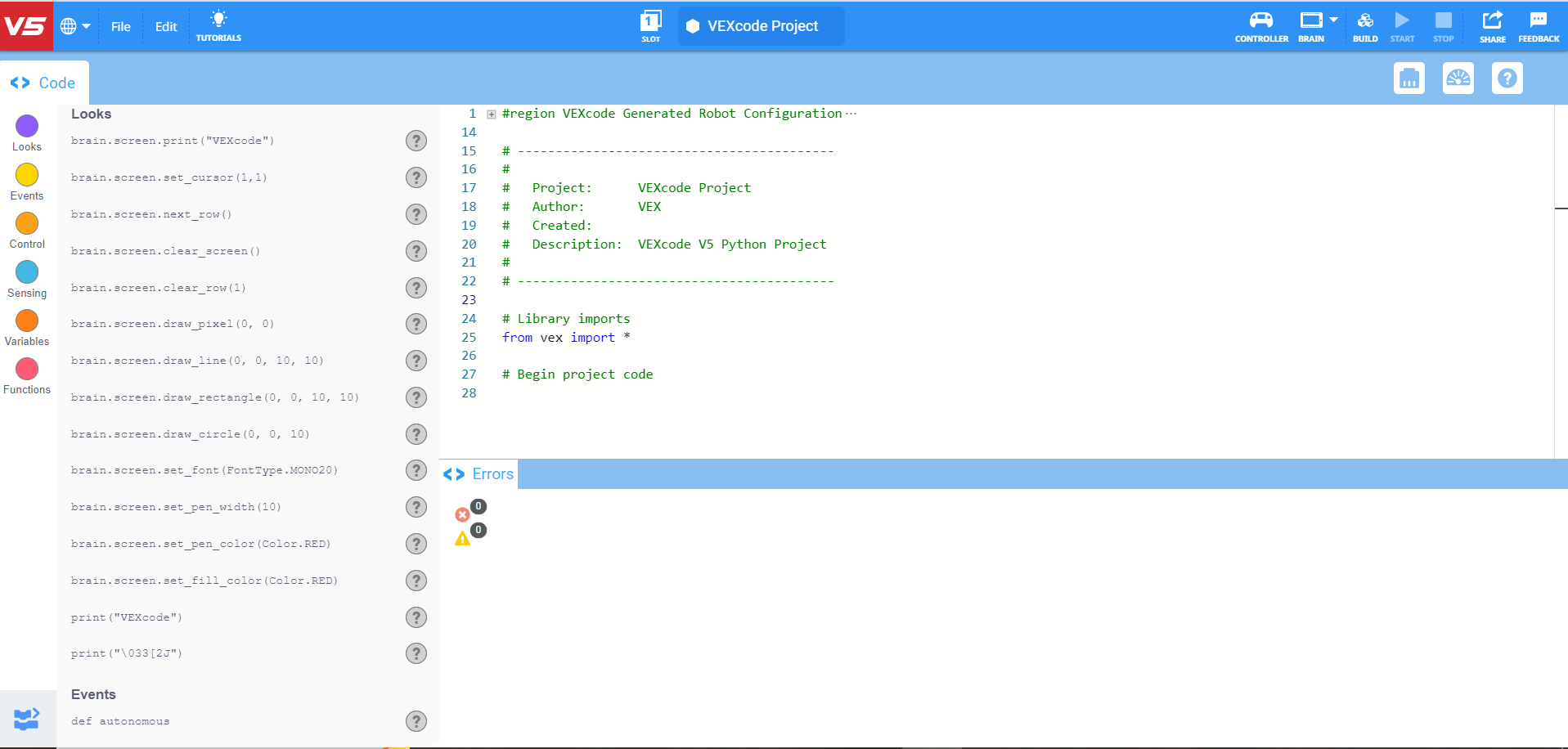
Ниже представлен обзор пользовательского интерфейса VEXcode V5. Учащиеся познакомятся с этими вкладками/кнопками во время занятий в лаборатории STEM Momentum Alley. В лаборатории STEM также имеются ссылки для получения дополнительной информации об этих вкладках/кнопках.
-
Инструкции Python для VEXcode V5, которые будут использоваться в этом исследовании:
-
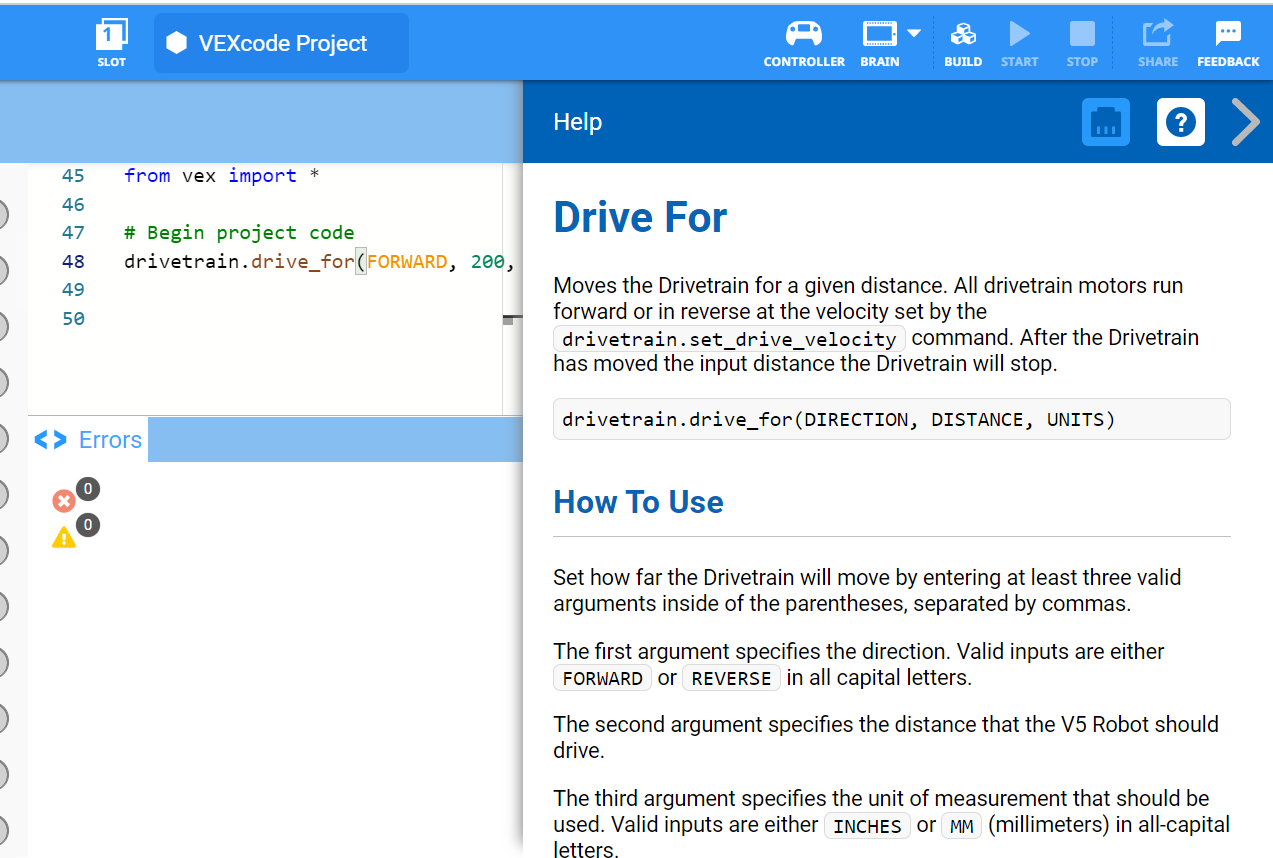
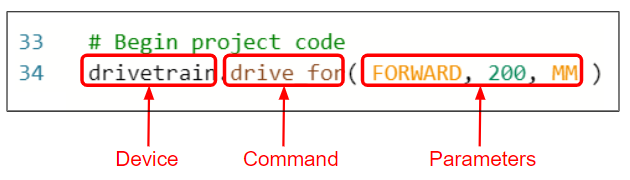
Drivetrain.drive_for(ВПЕРЕД, 200, ММ)
-
подождать(1, секунды)
-
-
Чтобы получить дополнительную информацию об инструкции, выберите «Справка», а затем выберите значок вопросительного знака рядом с командой, чтобы просмотреть дополнительную информацию.
-
Убедитесь, что у вас есть необходимое оборудование, инженерный блокнот и VEXcode V5, загруженные и готовые.
![]() Советы учителям
Советы учителям
Если учащийся впервые использует VEXcode V5, он может обратиться к учебникам в любой момент во время изучения.

| Количество | Необходимые материалы |
|---|---|
| 1 |
Спидбот Робот |
| 1 |
Заряженная батарея робота |
| 1 |
VEXкод V5 |
| 1 |
USB-кабель (при использовании компьютера) |
| 1 |
Инженерный блокнот |
![]() Советы учителям
Советы учителям
Смоделируйте для учащихся каждый шаг по устранению неполадок.
Шаг 2: Начать новый проект
Чтобы начать проект, выполните следующие шаги:
-
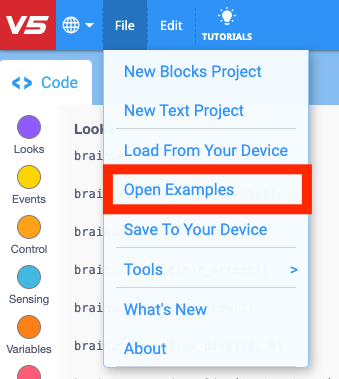
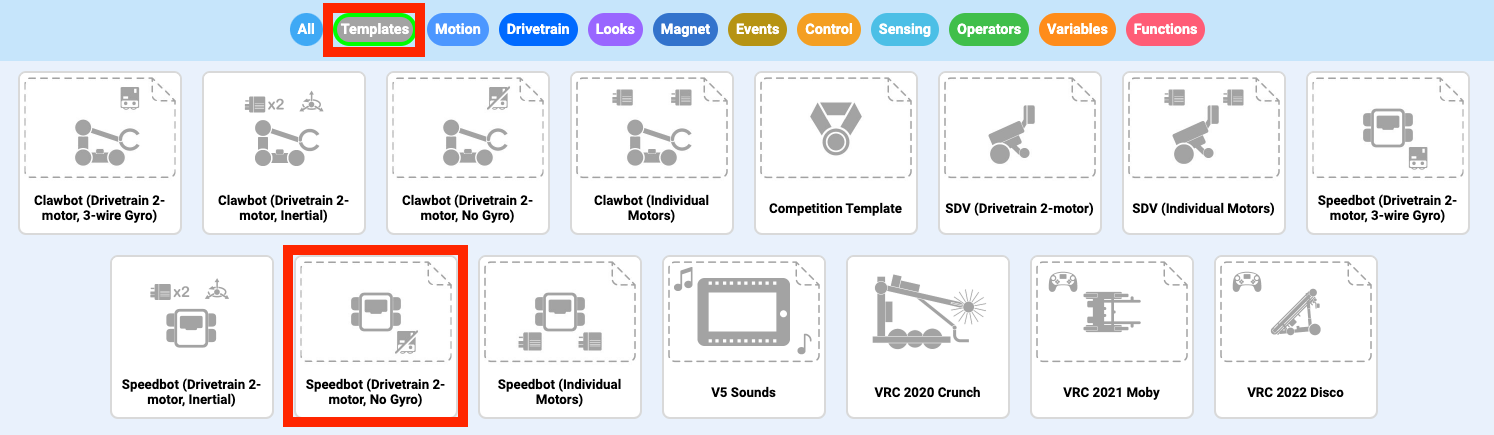
Откройте меню «Файл» и выберите «Открыть примеры».
-
Выберите и откройте проект шаблона Speedbot (трансмиссия, 2 двигателя, без гироскопа). Шаблон проекта содержит конфигурацию двигателя Speedbot . Если шаблон не используется, ваш робот не сможет корректно запустить проект.
-
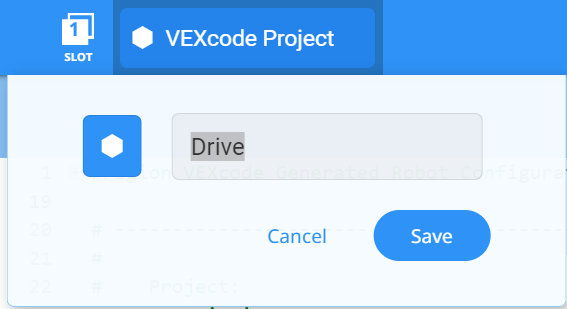
Поскольку вы будете работать над перемещением Speedbot вперед и назад, вы назовете свой проект Drive. Выберите имя проекта, введите «Диск» и выберите «Сохранить».
![]() Советы учителям
Советы учителям
-
Имена проектов могут содержать пробелы между словами или после них.

-
Вы можете попросить учащихся добавить к названию проекта свои инициалы или название своей группы. Это поможет дифференцировать проекты, если вы попросите учащихся представить их.
-
Поскольку это первое задание по программированию, которое могут попробовать ваши ученики, вам следует смоделировать шаги, а затем попросить учащихся выполнить те же действия. Затем учитель должен следить за учениками, чтобы убедиться, что они правильно выполняют шаги.
-
Убедитесь, что учащиеся выбрали «Открыть примеры» в меню «Файл».
-
Убедитесь, что учащиеся выбрали проект шаблона Speedbot (трансмиссия с 2 двигателями и без гироскопа).
-
Вы можете указать учащимся, что на странице «Примеры» можно выбрать несколько вариантов. По мере того, как они создают и используют других роботов, у них будет возможность использовать разные шаблоны.
-
Убедитесь, что имя проекта Drive теперь находится в окне в центре панели инструментов.

![]() Инструменты учителя
проектов
Инструменты учителя
проектов
-
Обратите внимание, что когда они впервые открыли VEXcode V5, окно было помечено как VEXcode Project. VEXcode Project — это имя проекта по умолчанию при первом открытии VEXcode V5. После того как проект был переименован в Диск и сохранен, на дисплее появилось новое имя проекта. Используя это окно на панели инструментов, можно легко проверить, используют ли учащиеся правильный проект.
-
Скажите учащимся, что теперь они готовы приступить к своему первому проекту. Объясните учащимся, что, выполнив несколько простых шагов, они смогут создать и запустить проект, который продвинет Speedbot вперед.
-
Напомните учащимся сохранять свои проекты во время работы. Разделы Python из библиотеки VEX объясняют методы сохранения в VEXcode V5
![]() инструментов учителя
Остановитесь и обсудите
инструментов учителя
Остановитесь и обсудите
Это хороший момент, чтобы сделать паузу и предложить учащимся просмотреть только что выполненные шаги по запуску нового проекта в VEXcode V5 индивидуально или в группах. Попросите учащихся поразмышлять индивидуально, прежде чем поделиться информацией в своей группе или перед всем классом.
Шаг 3: Двигайтесь вперед.
Теперь вы готовы начать программировать робота, чтобы он двигался вперед!
-
Прежде чем мы начнем программировать, нам нужно понять, что такое инструкция. Инструкция состоит из трех частей. Дополнительную информацию о раскрашивании кода в VEXcode V5 Python в этой статье.
-
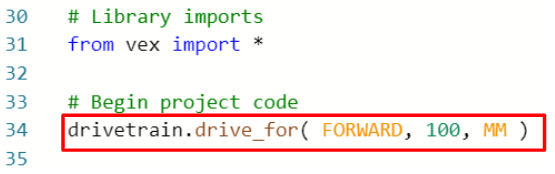
Добавьте инструкцию в проект:
![]() Советы учителям
Советы учителям
Вы можете заметить функцию автозаполнения, когда начнете вводить инструкцию. Используйте клавиши «Вверх» и «Вниз», чтобы выбрать нужное имя, затем нажмите «Tab» или (Enter/Return) на клавиатуре, чтобы сделать выбор. Дополнительную информацию об этой функции можно найти в статье Python. 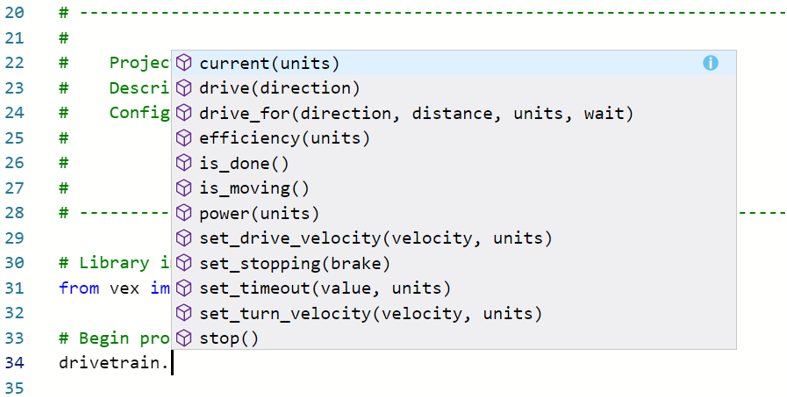
-
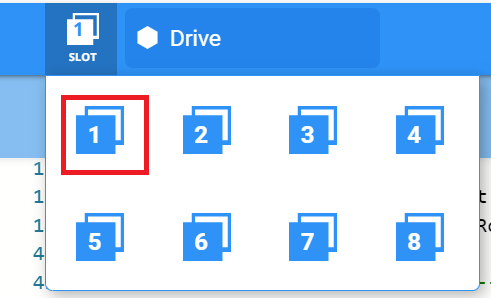
Нажмите значок «Слот», чтобы выбрать один из восьми доступных слотов «мозга робота», и выберите слот 1.
-
Подключите V5 Robot Brain к компьютеру с помощью кабеля micro USB и включите V5 Robot Brain. Значок «Мозг» на панели инструментов станет зеленым после успешного подключения.

-
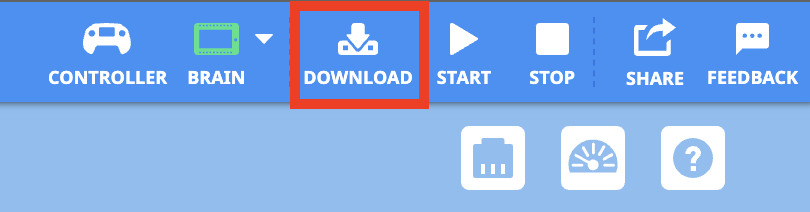
Выберите Download , чтобы загрузить проект в Brain.

![]() Инструментарий учителя
Инструментарий учителя
Напомните учащимся, что им нужно отсоединить USB-кабель от робота-мозга. Подключение робота к компьютеру во время выполнения проекта может привести к тому, что робот потянет за соединительный кабель.
![]() Инструментарий учителя
и обсудите
Инструментарий учителя
и обсудите
Попросите учащихся спрогнозировать, что, по их мнению, произойдет, когда этот проект будет загружен и запущен на Speedbot. Попросите учащихся записать свои прогнозы в свои инженерные тетради. Если позволяет время, попросите каждую группу поделиться своим предсказанием.
-
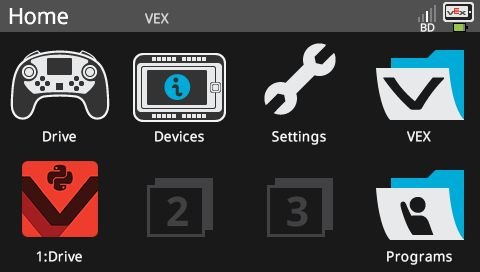
Убедитесь, что ваш проект загружен посмотрев на экран Robot Brain. Имя проекта Drive должно быть указано в слоте 1.
![]() Набор инструментов для учителя
сначала
Набор инструментов для учителя
сначала
- Смоделируйте выполнение проекта перед классом, прежде чем предложить его попробовать всем учащимся одновременно. Соберите учеников в одном месте и оставьте достаточно места для перемещения Speedbot, если он размещен на полу.
- Скажите учащимся, что теперь их очередь реализовать свой проект. Убедитесь, что у них есть свободный путь и что ни один спидбот не столкнется друг с другом.
-
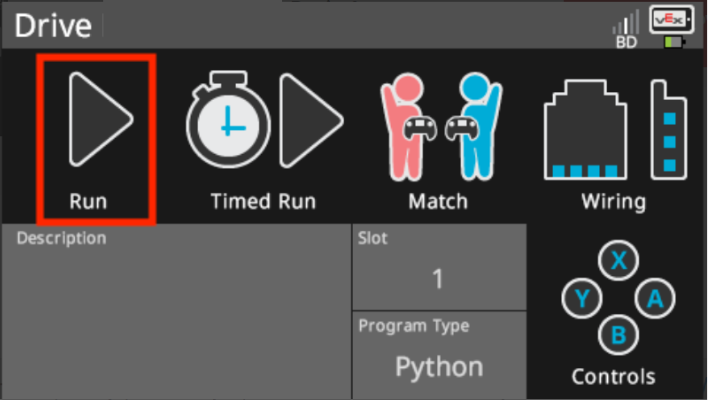
Запустите (Python) проект на роботе, убедившись, что проект выбран, а затем нажмите кнопку «Выполнить на Robot Brain. Поздравляем с созданием вашего первого проекта!
Шаг 4: Движение назад.
Теперь, когда вы запрограммировали своего робота на движение вперед, давайте запрограммируем его на движение назад.
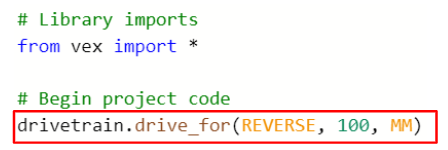
-
Измените параметр в инструкции Drive_for , чтобы отображалось REVERSE вместо FORWARD.
-
Выберите имя проекта, чтобы изменить его с Drive на Reverse.

-
Нажмите значок «Слот», чтобы выбрать новый слот. Выберите слот 2.

-
Загрузите (в Python) проект.
-
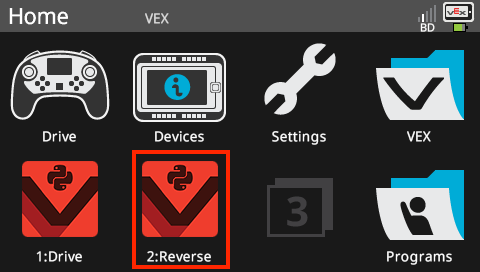
Убедитесь, что ваш проект загружен (в Python) , посмотрев на экран Robot Brain. Имя проекта Reverse должно быть указано в слоте 2.
-
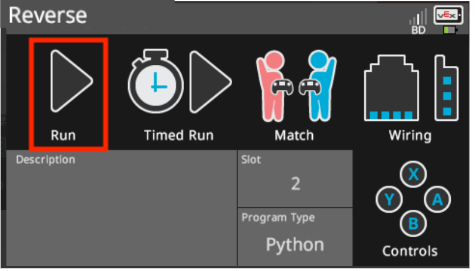
Запустите (в Python) проект на роботе, убедившись, что проект выбран, а затем нажмите кнопку «Выполнить на Robot Brain.
![]() Инструментарий учителя
Завершение шага 4.
Инструментарий учителя
Завершение шага 4.
- Чтобы изменить команду с вперед на назад, просто измените первый параметр на REVERSE. При этом двигатели трансмиссии будут двигаться в противоположном направлении.
- Количество мм можно изменить, но для этого примера мы оставим значение 100 мм, как установлено на предыдущем шаге.
- Напомните учащимся, что перед запуском проекта нужно отсоединить USB-кабель от робота-мозга.
- Напомните учащимся сохранять свои проекты во время работы. В разделах Python из библиотеки VEX объясняются методы сохранения в VEXcode V5.
Шаг 5: Подождите, затем двигайтесь задним ходом.
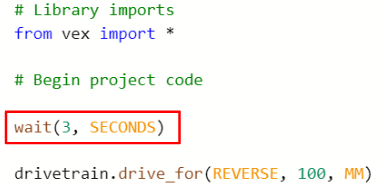
Теперь, когда мы запрограммировали робота двигаться вперед, а затем назад, мы можем добавить инструкцию wait , чтобы робот ждал определенное время перед движением назад.
-
Добавьте инструкцию ожидания, как показано. Это говорит роботу подождать три секунды, прежде чем двигаться задним ходом.
-
Выберите имя проекта, чтобы изменить его с Reverse на WaitReverse.
-
Нажмите значок «Слот», чтобы выбрать новый слот. Выберите слот 3.

-
Загрузите (в Python) проект.

-
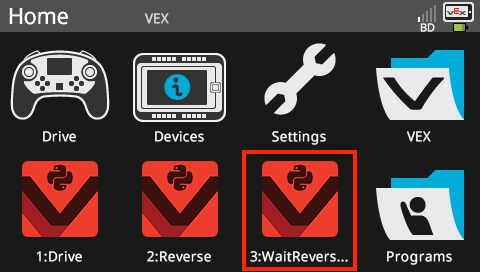
Убедитесь, что ваш проект загружен (в Python) , посмотрев на экран Robot Brain. Имя проекта WaitReverse должно быть указано в слоте 3.
-
Запустите (в Python) проект на роботе, убедившись, что проект выбран, а затем нажмите кнопку Run .

![]() Инструменты учителя
Завершение шага 5.
Инструменты учителя
Завершение шага 5.
- Использование команды wait не завершит проект, а только приостановит движение робота.
- Если учащиеся используют компьютер, напомните им, что перед запуском проекта нужно отсоединить USB-кабель от Robot Brain.
- Напомните учащимся сохранять свои проекты во время работы. В разделе Python из библиотеки VEX объясняются методы сохранения в VEXcode V5.
Шаг 6: Завершите испытание «Баскетбольные упражнения»!
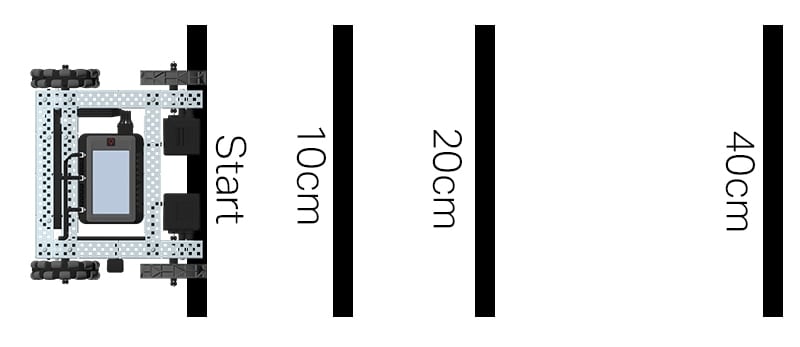
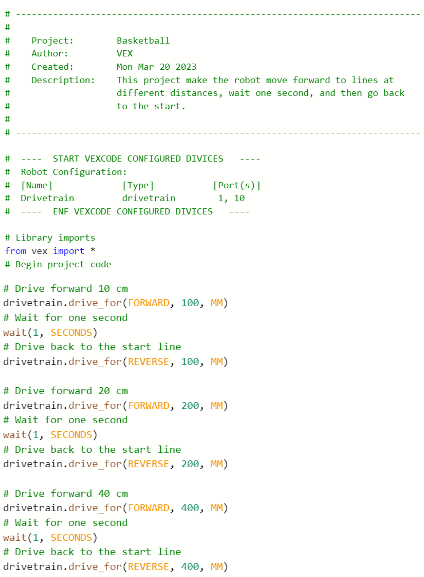
В соревновании по баскетбольным упражнениям робот должен уметь перемещаться по ряду линий на разных расстояниях. Робот переместится вперед к первой линии, которая находится на расстоянии 10 см от исходного положения, подождет 1 секунду, а затем переместится назад, вернувшись на ту же линию. Затем робот повторит действие, проехав вперед на 20 см ко второй линии, подождет 1 секунду, а затем поедет назад к исходной стартовой линии. Робот проедет вперед к третьей линии на расстояние 40 см, подождет 1 секунду, а затем, наконец, вернется на стартовую линию, чтобы завершить задание.
Прежде чем программировать робота, спланируйте его путь и поведение в своей инженерной тетради.
После завершения Баскетбольного испытания вы сможете комбинировать движения вперед и назад с дополнительным поведением робота, чтобы решать еще более сложные задачи.
При программировании помните, что 1 см = 10 мм.
![]() Инструментарий учителя
и обсудите
Инструментарий учителя
и обсудите
Попросите учащихся поделиться своими решениями в парах, прежде чем обсуждать их всем классом. Облегчите обсуждение, спросив:
- Сталкивались ли вы с какими-либо трудностями при программировании этого задания?
- Повел ли ваш робот так, как вы ожидали в соответствии с вашим проектом? Почему или почему нет?
- Если бы вы могли выполнить задание заново, что-нибудь вы сделали бы по-другому?
![]() Инструментарий учителя
Инструментарий учителя