
Zavedení
V předchozí lekci jste se dozvěděli, jak optický senzor hlásí hodnotu odstínu a blízkost detekovaných objektů, a napsali jste vnořené podmíněné příkazy pro třídění disků podle barvy pomocí optického senzoru. V této lekci si tyto znalosti rozšíříte tím, že se dozvíte, jak se dopravníky používají v průmyslové automatizaci, jaký je význam pohybů v čase a jak se senzor objektů používá k detekci přítomnosti objektu.
Na konci jednotky úspěšně přepravíte disk po dopravnících pomocí časových pohybů a naprogramujete senzor objektů tak, aby zastavil výstupní dopravník při detekci disku.
Spoluvytvářet vzdělávací cíle
Nyní, když jste zhlédli video, víte, že budete kódovat dopravníky pro přepravu disku podél dopravníku a kódovat objektový senzor pro zastavení výstupního dopravníku při detekci disku. Nejprve se dozvíte, jak se v průmyslové automatizaci používají lineární a serpentinové dopravníky. Poté se dozvíte, jaké jsou časové pohyby a jejich význam v dopravníkových operacích. Navíc se dozvíte, jak objektový senzor funguje a jak interpretovat data, která produkuje. Nakonec použijete všechny tyto dovednosti k vytvoření projektu, který rychle dopraví disk ze vstupního dopravníku na výstupní dopravník a zastaví výstupní dopravník, když je disk detekován objektovým senzorem.
Spolu se svou skupinou a učitelem budete vytvářet učební cíle, abyste tyto cíle zachytili, abyste společně pochopili své učební cíle pro jednotku. Své učební cíle napíšete do svého technického poznámkového bloku, abyste se na ně mohli odkazovat v celé jednotce.
Je užitečné formulovat cíle učení ve formě prohlášení „mohu“. Příklady vzdělávacích cílů pro tuto jednotku by mohly zahrnovat:
- Umím vysvětlit účel dopravníků v průmyslové výrobě.
- Mohu nakonfigurovat motor ve VEXcode EXP.
- Dokážu vysvětlit rozdíl mezi analogovým senzorem a digitálním senzorem.
- Mohu vytvořit projekt, který co nejrychleji přesune disk ze vstupního dopravníku na výstupní dopravník a použije objektový senzor k zastavení výstupního dopravníku při detekci disku.
Chcete-li vytvořit své učební cíle, nejprve přemýšlejte o tom, co budete potřebovat vědět, abyste dokončili aktivity uvedené ve výše uvedeném videu. Vytvořte si do technického poznámkového bloku seznam toho, co budete potřebovat vědět, naučit se a dělat, například takto:
- Zjistěte, co je dopravník.
- Seznam kroků pro konfiguraci motoru ve VEXcode EXP.
- Identifikujte charakteristiky analogového senzoru a digitálního senzoru.
- Spolupracujte s mou skupinou na dokončení aktivity Putting It All Together.
Dále spoluvytvářejte vzdělávací cíle na základě svého seznamu. Přemýšlejte o tom, jak může být každá z věcí, které jste uvedli, zarámována do učebního cíle pomocí prohlášení „mohu“. Tuto šablonu můžete použít k napsání vzdělávacích cílů do technického poznámkového bloku. (Google Doc / .docx / .pdf)
Například položka seznamu „Seznam kroků pro konfiguraci motoru ve VEXcode EXP“ může být přesunuta na učební cíl, mohu nakonfigurovat motor ve VEXcode EXP.
Následující tabulka ukazuje příklad, jak by mohl být vyplněn Learning Target Organizer ve vašem technickém poznámkovém bloku.
| Cílová kategorie učení | Učební cíle |
|---|---|
|
Znalostní cíle Co potřebuji vědět a pochopit, abych byl v oddělení úspěšný? |
|
|
Cíle dovedností Co mohu prokázat, že rozumím konceptům a dovednostem potřebným k úspěchu v jednotce? |
|
|
Cíle produktu Co mohu zaznamenat do svého technického poznámkového bloku, abych prokázal/a a rozšířil/a své znalosti o konceptech a dovednostech potřebných k úspěchu v jednotce? |
|
Podělte se o své vzdělávací cíle se svým učitelem. Upravte je podle potřeby tak, abyste se vy, vaše skupina a váš učitel shodli.
Slovní zásoba
V této jednotce se dozvíte, jak používat časové pohyby pro kódování dopravníkového systému pro přepravu disku, stejně jako jak kódovat objektový senzor pro detekci, když disk vstoupí do výstupního dopravníku. Tento seznam slovní zásoby je zde, aby poskytl odkaz na všechny nové termíny, se kterými se můžete setkat. Zaznamenejte si tuto slovní zásobu do svého technického poznámkového bloku. Tento seznam použijte jako referenci při práci v jednotce a při setkávání se se slovy, která možná neznáte.
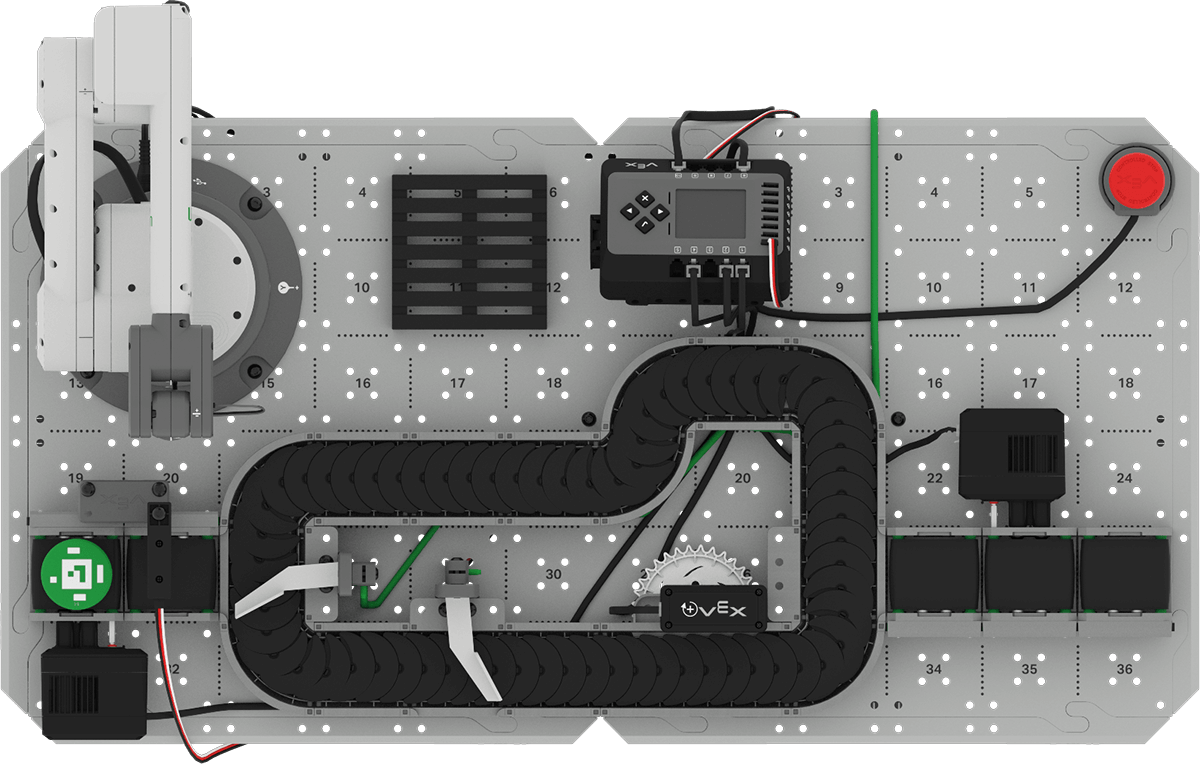
- Lineární dopravník
- Dopravník, který přepravuje materiály po přímé cestě nebo lineárně a slouží jako vstupní a výstupní body pro průchod předmětů na a z většího serpentinového dopravníku.
- Serpentinový dopravník
- Dopravník, který se skládá ze vzájemně propojených pásů a plošin uspořádaných do řady zákrutů připomínajících hadí tvar.
- Analogový senzor
-
Typ senzoru, který nepřetržitě hlásí hodnoty v daném rozsahu bez jakýchkoliv digitálních konverzí.
- Digitální senzor
- Typ senzoru, který odečítá a převádí tyto odečty na konkrétní číselné hodnoty.
- Reflexivita
- Měření množství světla, které se odráží od povrchu objektu.
- Prahová hodnota
- Používá se k určení, zda je hodnota nad, pod nebo v přijatelném rozsahu.
- Senzor objektu
- Třívodičový analogový senzor, který se skládá z infračervené LED diody a infračerveného světelného senzoru pro detekci přítomnosti objektu; senzor vrací jakoukoli hodnotu mezi 0% a 100% odrazivostí světla.
- Přesměrovač
- Komponenta dopravníku, která přesměruje nebo třídí položky na různé cesty nebo místa určení v rámci dopravníku.
| Množství | Potřebný materiál |
|---|---|
| 1 na skupinu |
Sada pracovních buněk CTE |
| 1 na skupinu |
Počítač |
| 1 na skupinu |
VEXcode EXP |
| 1 na skupinu |
Disky |
| 1 na studenta |
Technický poznámkový blok |
Vyberte Další > pro přechod na lekci 1.