
In früheren Einheiten hast du den 6-Achsen-Roboterarm von einem Punkt zum anderen bewegt, ohne dir Gedanken über den Weg des 6-Achsen-Arms zu machen. Es gibt jedoch oft Gelegenheiten, bei denen sich Hindernisse auf dem Weg eines Roboterarms befinden, so dass er nicht unbedingt in einer geraden Linie fahren kann. Stattdessen muss es über Wegpunkte fahren, damit es das Objekt oder Hindernis sicher umgehen kann.
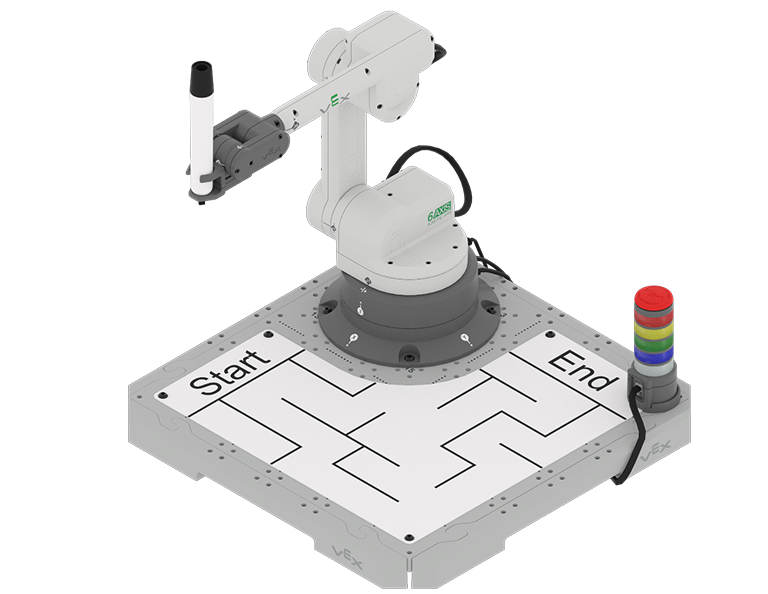
In dieser Einheit kodieren Sie den 6-Achsen-Arm, um sich in einem kontrollierten Pfad zu bewegen. Sie werden auch mit dem Stifthalter-Tool vertraut gemacht, sodass Sie den Stift verwenden können, um den Pfad des 6-Achsen-Arms auf dem Whiteboard zu zeichnen. Am Ende der Einheit kodieren Sie den 6-Achsen-Arm, um durch ein Labyrinth zu navigieren und seinen Weg mit dem Stift zu zeichnen.
Dokumentation in dieser Einheit
In diesem Gerät erstellen Sie VEXcode-Projekte, um den 6-Achsen-Arm zum Zeichnen mit dem Stift zu codieren. Sie werden aufgefordert, Ihre vielen Dinge in Ihrem technischen Notizbuch zu dokumentieren, um Ihnen bei Ihren Projekten zu helfen. Es gibt einige verschiedene Strategien, die hilfreich sein können, um komplexere Konzepte und Aktivitäten zu dokumentieren, darunter:
- Verwenden von Wörtern und/oder Zeichnungen, um das Ziel des Projekts zu notieren.
- Aufzeichnung einer Vorhersage darüber, was ein Projekt bewirken wird, was der 6-Achsen-Arm tun wird.
- Machen Sie sich Notizen über Blöcke oder Codierungskonzepte, die Sie gelernt haben, um Ihnen bei dieser und zukünftigen Aktivitäten zu helfen.
- Schreiben Sie Berechnungen auf, die Sie in Ihrem Projekt verwenden werden.
- Erstellen Sie Screenshots Ihres Projekts und fügen Sie es Ihrem Notizbuch hinzu.
Sehen Sie sich das Video unten an, um mehr über Strategien zur Dokumentation von Code in Ihrem technischen Notizbuch zu erfahren.
Lernziele mitgestalten
Nachdem Sie sich das Video angesehen haben, wissen Sie, dass Sie den 6-Achsen-Arm so programmieren, dass er sich auf einem kontrollierten Weg mit Wegpunkten bewegt, um Hindernisse zu umgehen und durch ein Labyrinth zu navigieren. Zuerst werden Sie in das Stifthalterwerkzeug eingeführt, damit Sie den 6-Achsen-Arm codieren können, um eine Linie mit dem Stift zu zeichnen. Dann lernen Sie, wie Sie einen Wegpunkt finden, um von einem Ort zum anderen um ein Hindernis herumzukommen, so dass Sie den 6-Achsen-Arm so codieren können, dass er sich in einem kontrollierten Weg bewegt. Sie bauen auf dieser Fähigkeit auf, um den 6-Achsen-Arm so zu programmieren, dass er einen Weg um mehrere Hindernisse herum zurücklegt. Du wirst all dies zusammenziehen, um einen Weg durch ein Labyrinth am Ende dieser Einheit zu zeichnen.
Sie erstellen gemeinsam mit Ihrer Gruppe und Ihrem Lehrer Lernziele, um diese Ziele zu erfassen, damit Sie ein gemeinsames Verständnis Ihrer Lernziele für die Einheit haben. Sie schreiben Ihre Lernziele in Ihr technisches Notizbuch, damit Sie sich in der gesamten Einheit darauf beziehen können.
Hilfreich ist es, Lernziele in Form von „Ich kann“ -Aussagen zu formulieren. Beispiele für Lernziele für diese Einheit könnten sein:
- Ich kann einen Wegpunkt zwischen zwei Standorten identifizieren.
- Ich kann den 6-Achsen-Arm so programmieren, dass er sich auf einem kontrollierten Weg um ein Hindernis bewegt.
Um Ihre Lernziele zu erstellen, sollten Sie zunächst ein Brainstorming durchführen, was Sie wissen müssen, um die im obigen Video gezeigten Aktivitäten abschließen zu können. Machen Sie eine Liste in Ihrem technischen Notizbuch, was Sie wissen, lernen und tun müssen, wie folgt:
- Befestigen Sie den Stift am 6-Achsen-Arm.
- Codieren Sie den 6-Achsen-Arm, um mit dem Stift zu zeichnen.
- Identifizieren Sie einen Wegpunkt, um sich um ein Hindernis zu bewegen.
- Arbeiten Sie mit meiner Gruppe zusammen, um das Labyrinth gemeinsam zu lösen.
Erstellen Sie als Nächstes gemeinsam Lernziele basierend auf Ihrer Liste. Denken Sie darüber nach, wie jedes der von Ihnen aufgelisteten Dinge mithilfe von „Ich kann“ -Aussagen in ein Lernziel eingebettet werden kann. Sie können diese Vorlage verwenden, um Ihre Lernziele in Ihr technisches Notizbuch zu schreiben. (Google Doc / .docx / .pdf)
| Lernzielkategorie | Lernziele |
|---|---|
|
Wissensziele Was muss ich wissen und verstehen, um in der Einheit erfolgreich zu sein? |
|
|
Argumentationsziele Was kann ich mit meinem Wissen und Verständnis tun, um in der Einheit erfolgreich zu sein? |
|
Vokabular
In dieser Einheit erfahren Sie, wie Sie den 6-Achsen-Arm so programmieren, dass er auf einem kontrollierten Weg um Hindernisse herum fährt. Diese Vokabelliste dient als Referenz für alle neuen Begriffe, auf die Sie möglicherweise stoßen. Notieren Sie dieses Vokabular in Ihrem technischen Notizbuch. Verwenden Sie diese Liste als Referenz, wenn Sie die Einheit durcharbeiten und auf Wörter stoßen, die Sie möglicherweise nicht kennen.
- Bahngesteuerte Bewegung
- Codieren des 6-Achsen-Arms, um sich in einem bestimmten Pfad zu bewegen, um von einem Ort zum anderen zu gelangen.
- Stifthalter-Werkzeug
- Der Endeffektor, der den Whiteboard-Marker im CTE Workcell Kit hält.
- Whiteboard-Aufsatz
- Das Whiteboard, das mit der CTE-Kachel verbunden ist, auf die der Stift zeichnen kann.
- Wegpunkt
- Ein Zwischenpunkt zwischen zwei Positionen auf einer Fahrtlinie.
| Menge | Benötigtes Material |
|---|---|
| 1 pro Gruppe |
CTE Workcell Kit |
| 1 pro Gruppe |
Computer |
| 1 pro Gruppe |
VEXcode EXP |
| 1 pro Schüler |
Technisches Notizbuch |
| 1 pro Gruppe |
Würfel (optional – würde als Hindernisse verwendet) |
| 1 pro Gruppe |
Lineal oder Messgerät |
Wählen Sie Weiter > , um mehr über die Verwendung des Stiftes am 6-Achsen-Arm zu erfahren.