
Invoering
In voorgaande modules verplaatste u de 6-assige robotarm van het ene punt naar het andere, zonder dat u zich druk hoefde te maken over het pad dat de 6-assige arm aflegde. Er zijn echter vaak situaties waarin zich obstakels op de weg van een robotarm bevinden, waardoor deze niet per se in een rechte lijn kan bewegen. In plaats daarvan moet het via waypoints reizen, zodat het veilig om het object of obstakel heen kan navigeren.
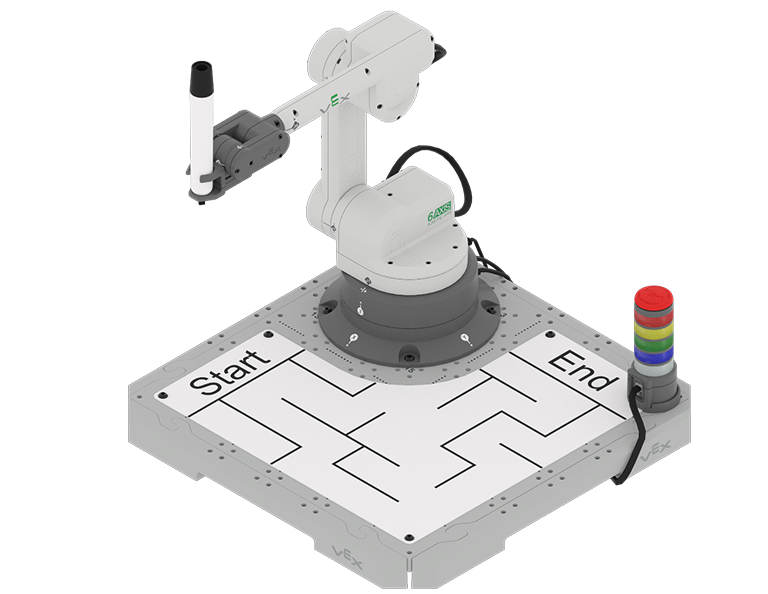
In deze unit programmeert u de 6-assige arm zodat deze in een gecontroleerde baan beweegt. U maakt ook kennis met de Pen Holder Tool, zodat u de pen kunt gebruiken om het pad van de 6-assige arm op het whiteboard te tekenen. Aan het eind van de module kunt u de 6-assige arm programmeren om door een doolhof te navigeren en de route ervan met de pen te tekenen.
Bekijk de onderstaande introductievideo voor een overzicht van wat u in deze module leert en doet.
Documenteren in deze eenheid
In deze unit bouw je VEXcode-projecten om de 6-assige arm te coderen om met de pen te tekenen. U wordt gevraagd om uw vele dingen in uw technische notitieblok te documenteren om u te helpen met uw projecten. Er zijn enkele verschillende strategieën die nuttig kunnen zijn voor het documenteren van complexere concepten en activiteiten, waaronder:
- Gebruik woorden en/of tekeningen om het doel van het project te noteren.
- Het vastleggen van een voorspelling over wat een project de 6-assige arm zal laten doen.
- Het maken van aantekeningen over blokken of codeerconcepten die je hebt geleerd om je te helpen bij deze en toekomstige activiteiten.
- Het opschrijven van berekeningen die je in je project gaat gebruiken.
- Schermafbeeldingen van je project maken en toevoegen aan je notitieblok.
Bekijk de onderstaande video voor meer informatie over strategieën voor het documenteren van code in uw technische notebook.
Co-creëer leerdoelen
Nu je de video hebt bekeken, weet je dat je de 6-assige arm zult coderen om in een gecontroleerd pad te bewegen met waypoints om obstakels te omzeilen en door een doolhof te navigeren. Eerst maakt u kennis met de penhouder, zodat u de 6-assige arm kunt coderen om een lijn te trekken met de pen. Vervolgens leert u hoe u een routepunt kunt vinden om van de ene locatie naar de andere te komen rond een obstakel, zodat u de 6-assige arm kunt coderen om in een gecontroleerd pad te bewegen. Je bouwt op deze vaardigheid voort om de 6-assige arm te coderen om een pad rond meerdere obstakels te bewandelen. Je trekt dit alles samen om een pad door een doolhof aan het einde van deze eenheid te tekenen.
Je maakt samen met je groep en je docent leerdoelen om deze doelen vast te leggen, zodat je een gedeeld begrip hebt van je leerdoelen voor de Unit. Je schrijft je leerdoelen in je technische notitieblok, zodat je ze in de hele unit kunt raadplegen.
Het is handig om leerdoelen te formuleren in de vorm van 'ik kan' -verklaringen. Voorbeelden van leerdoelen voor deze eenheid kunnen zijn:
- Ik kan een routepunt tussen twee locaties identificeren.
- Ik kan de 6-assige arm coderen om op een gecontroleerd pad rond een obstakel te bewegen.
Om je leerdoelen te maken, moet je eerst brainstormen over wat je moet weten om de activiteiten in de bovenstaande video te kunnen voltooien. Maak een lijst in je technische notitieboek van wat je moet weten, leren en doen, zoals dit:
- Bevestig de pen aan de 6-assige arm.
- Codeer de 6-assige arm om met de pen te tekenen.
- Identificeer een routepunt om een obstakel te omzeilen.
- Werk samen met mijn groep om het doolhof op te lossen.
Creëer vervolgens leerdoelen op basis van je lijst. Denk na over hoe elk van de dingen die je hebt opgesomd, kan worden ingelijst in een leerdoel, met behulp van 'Ik kan' -verklaringen. U kunt dit sjabloon gebruiken om u te helpen uw leerdoelen in uw technische notitieblok te schrijven. (Google Doc / .docx / .pdf)
De volgende tabel toont een voorbeeld van hoe de Learning Target Organizer in uw technische notitieblok kan worden ingevuld.
| Leerdoelcategorie | Leerdoelen |
|---|---|
|
Kennisdoelen Wat moet ik weten en begrijpen om succesvol te zijn in de Unit? |
|
|
Redeneringsdoelen Wat kan ik doen met wat ik weet en begrijp om succesvol te zijn in de eenheid? |
|
Woordenschat
In deze unit leert u hoe u de 6-assige arm codeert om op een gecontroleerd pad rond obstakels te reizen. Deze woordenlijst is hier als referentie voor eventuele nieuwe termen die u tegenkomt. Noteer deze woordenschat in uw technische notitieboekje. Gebruik deze lijst als referentie terwijl u door het apparaat werkt en woorden tegenkomt die u misschien niet kent.
- Padgestuurde beweging
- Codering van de 6-assige arm om een specifiek pad te bewandelen om van de ene locatie naar de andere te komen.
- Penhouder gereedschap
- De eindeffector die de whiteboardmarker in de CTE Workcell Kit vasthoudt.
- Whiteboard-bijlage
- Het whiteboard dat verbinding maakt met de CTE-tegel waarop de pen kan tekenen.
- Waypoint
- Een tussenliggend punt tussen twee locaties op een rij.
| Aantal | Benodigde materialen |
|---|---|
| 1 per groep |
CTE Workcell Kit |
| 1 per groep |
Computer |
| 1 per groep |
VEXcode EXP |
| 1 per student |
Technisch notitieboekje |
| 1 per groep |
Kubussen (optioneel – zouden als obstakels worden gebruikt) |
| 1 per groep |
Liniaal of meetinstrument |
Selecteer Volgende > voor meer informatie over het gebruik van de pen op de 6-assige arm.