
Nelle unità precedenti, hai spostato il braccio robotico a 6 assi da un punto all'altro senza preoccuparti del percorso che il braccio a 6 assi ha preso. Tuttavia, ci sono spesso occasioni in cui ci sono ostacoli nel percorso di un braccio robotico, in modo che non possa necessariamente viaggiare in linea retta. Deve invece viaggiare attraverso i waypoint, in modo da poter aggirare l'oggetto o l'ostacolo in sicurezza.
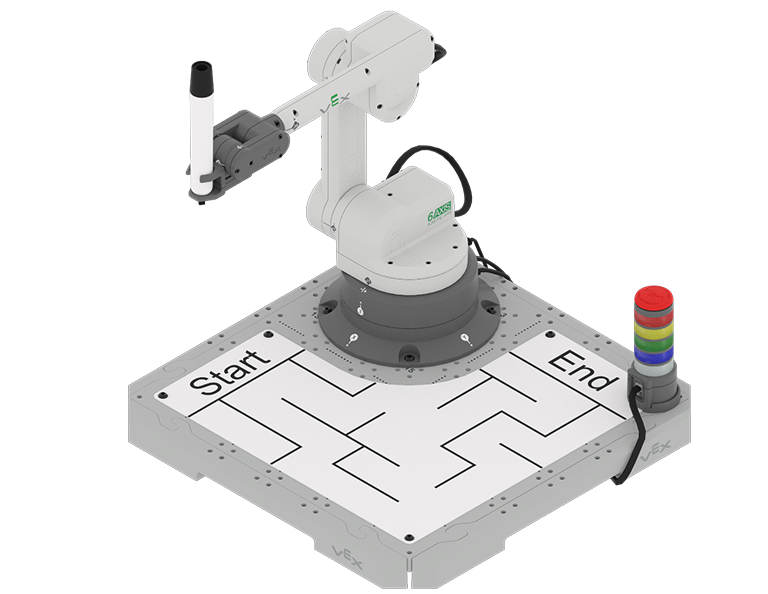
In questa unità si codificherà il braccio a 6 assi per muoversi in un percorso controllato. Verrà inoltre presentato lo strumento Portapenne, in modo da poter utilizzare la penna per tracciare il percorso del braccio a 6 assi sulla lavagna. Alla fine dell'Unità, codificherai il Braccio a 6 Assi per navigare attraverso un labirinto e tracciarne il percorso con la Penna.
Documentazione in questa unità
In questa unità, costruirai progetti VEXcode per codificare il braccio a 6 assi da disegnare con la penna. Ti verrà chiesto di documentare le tue molte cose nel tuo quaderno di ingegneria per aiutarti con i tuoi progetti. Esistono diverse strategie che possono essere utili per documentare concetti e attività più complessi, tra cui:
- Utilizzare parole e/o disegni per annotare l'obiettivo del progetto.
- Registrazione di una previsione su ciò che un progetto causerà al braccio a 6 assi.
- Prendere appunti su blocchi o concetti di codifica che hai imparato per aiutarti in questa attività e in quelle future.
- Annotare i calcoli che utilizzerai nel tuo progetto.
- Scattare screenshot del tuo progetto e aggiungerlo al tuo blocco appunti.
Guarda il video qui sotto per conoscere le strategie per documentare il codice nel tuo quaderno di ingegneria.
Co-creare obiettivi di apprendimento
Ora che hai visto il video, sai che codificherai il braccio a 6 assi per muoverti in un percorso controllato usando i waypoint per aggirare gli ostacoli e navigare in un labirinto. Innanzitutto, ti verrà presentato lo strumento Portapenne in modo da poter codificare il braccio a 6 assi per tracciare una linea con la penna. Quindi imparerai come trovare un waypoint per spostarti da una posizione all'altra intorno a un ostacolo, in modo da poter codificare il braccio a 6 assi per muoverti in un percorso controllato. Svilupperai questa abilità per codificare il braccio a 6 assi per percorrere un percorso intorno a più ostacoli. Metterai insieme tutto questo per tracciare un percorso attraverso un labirinto alla fine di questa Unità.
Co-creerai obiettivi di apprendimento con il tuo gruppo e il tuo insegnante per catturare questi obiettivi, in modo da avere una comprensione condivisa dei tuoi obiettivi di apprendimento per l'Unità. Scriverai i tuoi obiettivi di apprendimento nel tuo quaderno di ingegneria in modo da poterli consultare in tutta l'Unità.
È utile formulare gli obiettivi di apprendimento sotto forma di affermazioni "Io posso". Esempi di obiettivi di apprendimento per questa unità potrebbero includere:
- Posso identificare un waypoint tra due posizioni.
- Posso codificare il braccio a 6 assi per muovermi su un percorso controllato intorno a un ostacolo.
Per creare i tuoi obiettivi di apprendimento, fai prima un brainstorming su ciò che devi sapere per poter completare le attività mostrate nel video qui sopra. Fai un elenco nel tuo quaderno di ingegneria di ciò che dovrai sapere, imparare e fare, in questo modo:
- Fissare la penna al braccio a 6 assi.
- Codificare il braccio a 6 assi per disegnare con la penna.
- Identifica un waypoint per aggirare un ostacolo.
- Lavorare con il mio gruppo per risolvere il labirinto in modo collaborativo.
Successivamente, co-crea obiettivi di apprendimento in base al tuo elenco. Pensa a come ciascuna delle cose che hai elencato può essere inquadrata in un obiettivo di apprendimento, usando le affermazioni "Posso". Puoi utilizzare questo modello per aiutarti a scrivere i tuoi obiettivi di apprendimento nel tuo quaderno di ingegneria. (Google Doc / .docx / .pdf)
Ad esempio, la voce di elenco "Identificare un waypoint per aggirare un ostacolo" può essere spostata sull'obiettivo di apprendimento di Posso codificare il braccio a 6 assi per spostarmi su un percorso controllato attorno a un ostacolo.
Condividi i tuoi obiettivi di apprendimento con il tuo insegnante. Regolarli secondo necessità in modo che tu, il tuo gruppo e il tuo insegnante siate tutti d'accordo.
| Categoria di obiettivi di apprendimento | Obiettivi di apprendimento |
|---|---|
|
Obiettivi di conoscenza Cosa devo sapere e capire per avere successo nell'unità? |
|
|
Obiettivi di ragionamento Cosa posso fare con ciò che so e capisco per avere successo nell'unità? |
|
Vocabolario
In questa unità, imparerai come codificare il braccio a 6 assi per viaggiare su un percorso controllato intorno agli ostacoli. Questo elenco di vocaboli è qui per fornire un riferimento per eventuali nuovi termini che potresti incontrare. Registra questo vocabolario nel tuo quaderno di ingegneria. Usa questo elenco come riferimento mentre lavori attraverso l'Unità e incontri parole con cui potresti non avere familiarità.
- Movimento controllato dal percorso
- Codifica del braccio a 6 assi per spostarsi in un percorso specifico per spostarsi da una posizione all'altra.
- Strumento portapenne
- L'attuatore finale che contiene il marcatore della lavagna nel kit CTE Workcell.
- Allegato lavagna
- La lavagna che si collega alla tessera CTE su cui la penna può disegnare.
- Waypoint
- Un punto intermedio tra due posizioni su una linea di viaggio.
| Quantità | Materiali necessari |
|---|---|
| 1 per gruppo |
CTE Workcell Kit |
| 1 per gruppo |
Computer |
| 1 per gruppo |
VEXcode EXP |
| 1 per studente |
Taccuino tecnico |
| 1 per gruppo |
Cubi (opzionale – sarebbero usati come ostacoli) |
| 1 per gruppo |
Righello o dispositivo di misurazione |
Selezionare Avanti > per informazioni sull'utilizzo della penna sul braccio a 6 assi.