
Dans les unités précédentes, vous avez déplacé le bras robotique à 6 axes d'un point à un autre sans vous soucier du chemin emprunté par le bras à 6 axes. Cependant, il y a souvent des occasions où il y a des obstacles sur le chemin d'un bras robotique, de sorte qu'il ne peut pas nécessairement se déplacer en ligne droite. Il doit plutôt se déplacer via des points de cheminement, afin de pouvoir contourner l'objet ou l'obstacle en toute sécurité.
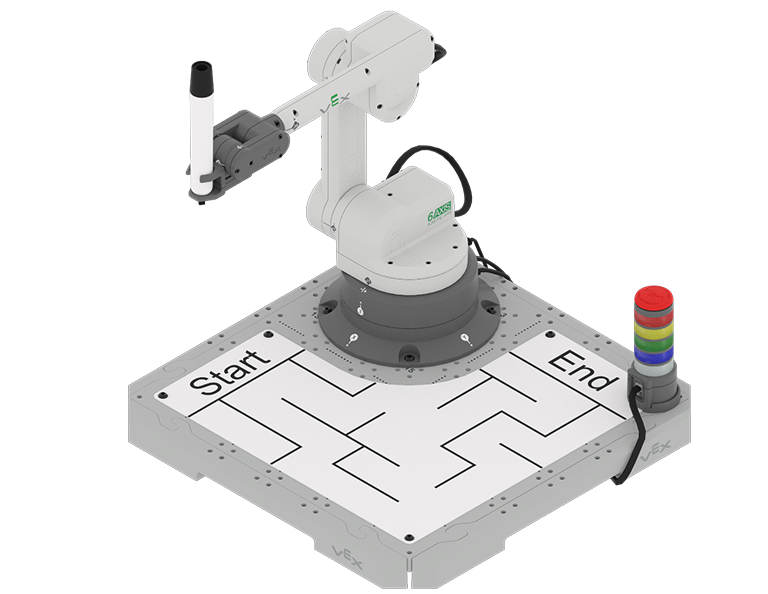
Dans cette unité, vous allez coder le bras à 6 axes pour qu'il se déplace dans une trajectoire contrôlée. Vous serez également initié à l'outil Porte-stylo, afin que vous puissiez utiliser le stylo pour dessiner la trajectoire du bras à 6 axes sur le tableau blanc. À la fin de l'unité, vous coderez le bras à 6 axes pour naviguer dans un labyrinthe et dessiner son chemin avec le stylo.
Documentation dans cette unité
Dans cette unité, vous allez créer des projets VEXcode pour coder le bras à 6 axes à dessiner avec le stylo. Vous serez invité à documenter vos nombreuses choses dans votre cahier d'ingénierie pour vous aider dans vos projets. Il existe différentes stratégies qui peuvent être utiles pour documenter des concepts et des activités plus complexes, notamment :
- Utiliser des mots et/ou des dessins pour noter l'objectif du projet.
- Enregistrement d'une prédiction sur ce qu'un projet fera faire au bras à 6 axes.
- Prendre des notes sur les blocs ou les concepts de codage que vous avez appris pour vous aider dans cette activité et les activités futures.
- Rédaction des calculs que vous utiliserez dans votre projet.
- Prendre des captures d'écran de votre projet et l'ajouter à votre bloc-notes.
Regardez la vidéo ci-dessous pour en savoir plus sur les stratégies de documentation du code dans votre carnet d'ingénierie.
Co-créer des cibles d'apprentissage
Maintenant que vous avez regardé la vidéo, vous savez que vous allez coder le bras à 6 axes pour qu'il se déplace dans un chemin contrôlé en utilisant des points de cheminement pour contourner les obstacles et naviguer dans un labyrinthe. Tout d'abord, vous serez initié à l'outil de support de stylo afin que vous puissiez coder le bras à 6 axes pour tracer une ligne avec le stylo. Ensuite, vous apprendrez à trouver un point de cheminement afin de vous déplacer d'un endroit à un autre autour d'un obstacle, de sorte que vous puissiez coder le bras à 6 axes pour qu'il se déplace dans un chemin contrôlé. Vous développerez cette compétence pour coder le bras à 6 axes afin de parcourir un chemin autour de multiples obstacles. Vous allez rassembler tout cela pour tracer un chemin à travers un labyrinthe à la fin de cette unité.
Vous co-créerez des objectifs d'apprentissage avec votre groupe et votre enseignant pour saisir ces objectifs, afin d'avoir une compréhension commune de vos objectifs d'apprentissage pour l'unité. Vous écrirez vos objectifs d'apprentissage dans votre cahier d'ingénierie afin que vous puissiez vous y référer dans toute l'unité.
Il est utile de formuler les objectifs d'apprentissage sous la forme d'énoncés « Je peux ». Voici quelques exemples d'objectifs d'apprentissage pour cette unité :
- Je peux identifier un point de cheminement entre deux endroits.
- Je peux coder le bras à 6 axes pour qu'il se déplace sur une trajectoire contrôlée autour d'un obstacle.
Pour créer vos objectifs d'apprentissage, commencez par réfléchir à ce que vous devez savoir pour pouvoir terminer les activités présentées dans la vidéo ci-dessus. Faites une liste dans votre cahier d'ingénierie de ce que vous devrez savoir, apprendre et faire, comme ceci :
- Fixez le stylo au bras à 6 axes.
- Codez le bras à 6 axes pour dessiner avec le stylo.
- Identifiez un point de passage pour contourner un obstacle.
- Travaillez avec mon groupe pour résoudre le labyrinthe en collaboration.
Ensuite, co-créez des objectifs d'apprentissage en fonction de votre liste. Réfléchissez à la façon dont chacune des choses que vous avez énumérées peut être encadrée dans une cible d'apprentissage, en utilisant des énoncés « Je peux ». Vous pouvez utiliser ce modèle pour vous aider à écrire vos objectifs d'apprentissage dans votre cahier d'ingénierie. (Google Doc / .docx / .pdf)
Par exemple, l'élément de liste « Identifier un point de cheminement pour se déplacer autour d'un obstacle » peut être déplacé vers la cible d'apprentissage de Je peux coder le bras à 6 axes pour se déplacer sur un chemin contrôlé autour d'un obstacle.
Partagez vos objectifs d'apprentissage avec votre professeur. Ajustez-les au besoin afin que vous, votre groupe et votre enseignant soyez tous d'accord.
| Catégorie d'objectifs d'apprentissage | Objectifs d'apprentissage |
|---|---|
|
Objectifs de connaissances Que dois-je savoir et comprendre pour réussir dans l'unité ? |
|
|
Objectifs de raisonnement Que puis-je faire avec ce que je sais et comprends pour réussir dans l'unité ? |
|
Vocabulaire
Dans cette unité, vous apprendrez à coder le bras à 6 axes pour voyager sur une trajectoire contrôlée autour des obstacles. Cette liste de vocabulaire est ici pour fournir une référence pour tous les nouveaux termes que vous pourriez rencontrer. Enregistrez ce vocabulaire dans votre cahier d'ingénierie. Utilisez cette liste comme référence lorsque vous travaillez dans l'unité et rencontrez des mots que vous ne connaissez peut-être pas.
- Mouvement contrôlé par la trajectoire
- Codage du bras à 6 axes pour se déplacer dans un chemin spécifique pour aller d'un endroit à un autre.
- Outil porte-stylo
- L'effecteur final qui tient le marqueur de tableau blanc dans le kit de cellule de travail CTE.
- Pièce jointe du tableau blanc
- Le tableau blanc qui se connecte à la tuile CTE sur laquelle le stylo peut dessiner.
- Point de cheminement
- Un point intermédiaire entre deux emplacements sur une ligne de déplacement.
| Quantité | Matériel nécessaire |
|---|---|
| 1 par groupe |
Kit de cellule de travail CTE |
| 1 par groupe |
Ordinateur |
| 1 par groupe |
EXP VEXCODE |
| 1 par élève |
Carnet d'ingénierie |
| 1 par groupe |
Cubes (facultatif – seraient utilisés comme obstacles) |
| 1 par groupe |
Règle ou appareil de mesure |
Sélectionnez Suivant > pour en savoir plus sur l'utilisation du stylo sur le bras à 6 axes.