
In Lektion 2 haben Sie gelernt, wie Sie einen Wegpunkt finden, um einen gesteuerten Pfad für den 6-Achsen-Roboterarm zu codieren, um ein Hindernis zu vermeiden. In dieser Lektion üben Sie, Wegpunkte zu finden, um mehrere Hindernisse zu vermeiden. Am Ende dieser Lektion verwenden Sie die Wegpunkte, die Sie gefunden haben, um den 6-Achsen-Arm zu kodieren, um sich zu bewegen und einen Weg zwischen Hindernissen zu zeichnen.

Mehrere Wegpunkte
In vielen Situationen und Branchen müssen Roboterarme reisen und sich um mehrere Hindernisse bewegen. Sie können Strategien verwenden, die Sie zuvor gelernt haben, um diese Wegpunkte zu finden. Um dies zu üben, befolgen Sie diese Schritte.

Richte deine Unterkunft zunächst mit zwei Bereichen ein, die auf dem Whiteboard-Anhang mit einer Whiteboard-Markierung markiert sind. Diese sollten in etwa die Größe eines Würfels haben.
Zeichnen Sie dieses Layout in Ihrem technischen Notizbuch.

Ihr 6-Achsen-Arm muss eine Linie zeichnen, um dem hier angegebenen Weg zu folgen. Dokumentieren Sie den Pfad in Ihrem technischen Notizbuch.
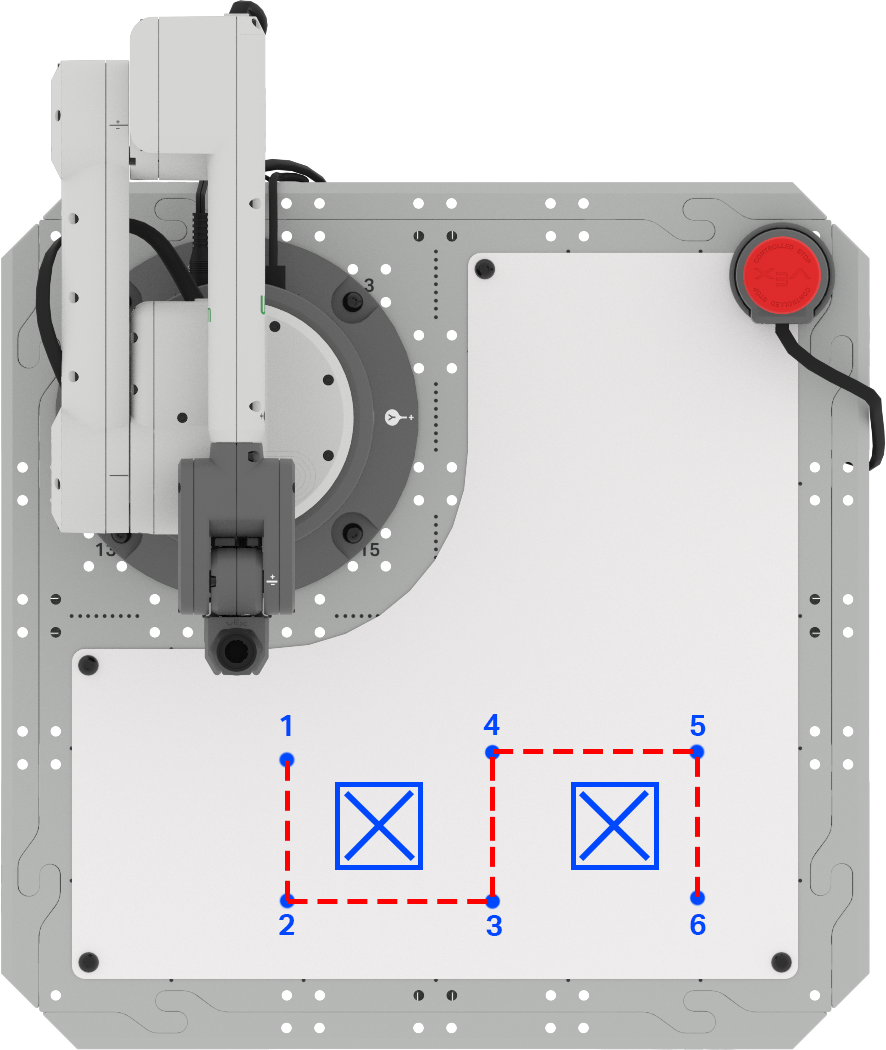
Beschriften Sie jeden benötigten Wegpunkt auf Ihrem Whiteboard. Dokumentieren Sie diese Wegpunkte in Ihrem technischen Notizbuch.
Im nächsten Schritt müssen Sie die (x, y, z) -Koordinaten jedes Wegpunkts bestimmen. Dies kann mit der Formel aus Lektion 2 erfolgen, oder Sie können die Monitorkonsole verwenden, um jede dieser Koordinaten zu erfassen.
Zur Kenntnisnahme
Bei der Verwendung der Formel zur Berechnung der unbekannten Koordinaten eines Wegpunkts ist die Richtung wichtig, in die sich der 6-Achsen-Arm entlang einer Achse bewegen muss. Wenn sich der 6-Achsen-Arm in die positive x- oder y-Richtung bewegt, ist der Wert von ∆x oder ∆y positiv. Wenn sich der 6-Achsen-Arm in die negative x- oder y-Richtung bewegt, ist der Wert von ∆x oder ∆y negativ.
Wenn Sie sich beispielsweise von Wegpunkt 3 zu Wegpunkt 4 bewegen, bewegt sich der
6-Achsen-Arm entlang der x-Achse in die negative Richtung.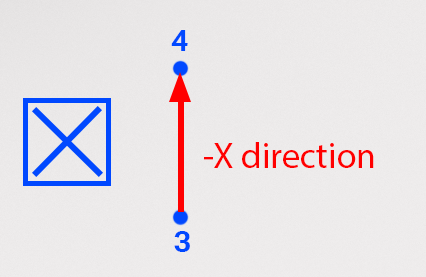
Bei Verwendung der Formel ist der Wert für ∆x negativ. In diesem Beispiel beträgt
die x-Koordinate von Punkt 3 195 mm, und der Abstand zwischen den Punkten 3 und 4 wurde
mit 105 mm gemessen. Mit der Formel können wir die x-Koordinate von Punkt 4 auf 90 mm
berechnen, wie hier gezeigt. 

Sie haben zuvor die Monitorkonsole in Einheit 3 verwendet.
Um die Monitorkonsole in VEXcode EXP zu öffnen, wählen Sie das Monitorsymbol. Stellen Sie sicher, dass Ihr 6-Achsen-Arm mit VEXcode EXP verbunden ist.

Bewegen Sie das Ende des 6-Achsenarms manuell zu jedem Wegpunkt und notieren Sie die entsprechende (x, y, z) -Koordinate in Ihrem technischen Notizbuch.

Nachdem Sie nun Ihre Koordinaten für jeden Wegpunkt haben, müssen Sie das VEXcode-Projekt aus Lektion 2 bearbeiten.
Öffnen Sie Ihr Projekt in VEXcode EXP. Dieses Projekt sollte die folgenden Blöcke enthalten, kann aber unterschiedliche Koordinatenwerte haben.

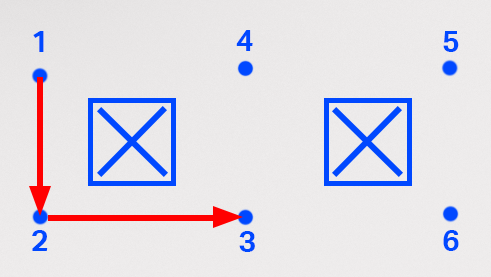
Geben Sie die Koordinaten der Wegpunkte 1, 2 und 3 in die drei Blöcke zum Positionieren ein. Achten Sie darauf, Ihre Koordinaten zu verwenden.
Hinweis: Sie können die K omment-Blöcke sobearbeiten , dass sie dem Projekt entsprechen, indem Sie das Leerzeichen auswählen und eingeben.

Schauen Sie sich die Blöcke im Projekt an. Was wird der 6-Achsen-Arm Ihrer Meinung nach tun, wenn das Projekt ausgeführt wird? Dokumentieren Sie Ihre Vorhersage in Ihrem technischen Notizbuch.

Stellen Sie sicher, dass der 6-Achsen-Arm mit dem VEXcode verbunden ist. Führen Sie Ihr Projekt aus.
Beobachten Sie das Verhalten des 6-Achsen-Arms. Bewegt es sich so, wie Sie es vorhergesagt haben?
Stoppen Sie das Projekt, sobald der 6-Achsen-Arm seine Bewegung beendet hat.
Der 6-Achsen-Arm sollte sich von Wegpunkt 1 nach 2 bewegen und bei Wegpunkt 3 enden. Wenn dies nicht der Fall ist, gehen Sie zurück und überprüfen Sie die Koordinaten, die Sie in das Projekt eingegeben haben. Stellen Sie sicher, dass die x-, y- und z-Parameter mit den Koordinaten übereinstimmen, die Sie in Ihrem technischen Notizbuch erfasst haben. Führen Sie das Projekt erneut aus, um es zu testen.
Sobald Sie erfolgreich zum Wegpunkt 3 navigiert sind, fahren Sie mit dem nächsten Schritt fort.

Fügen Sie drei Verschieben, um Blöcke zum Stapel zu positionieren, so dass Sie insgesamt sechs haben – einen für jeden Wegpunkt sowie Ihren Start- und Endstandort.
Zur Kenntnisnahme
Sie können auch Blöcke hinzufügen, indem Sie duplizieren, was sich bereits in einem Stapel befindet. Um zu duplizieren, öffnen Sie das Kontextmenü, indem Sie mit der rechten Maustaste auf den Block klicken, den Sie duplizieren möchten. Beim Duplizieren wird jeder Block unter dem von Ihnen ausgewählten dupliziert.
In diesem Projekt können Sie den ersten Move to position-Block auswählen, um alle drei für insgesamt sechs zu duplizieren. Sobald "Duplizieren" ausgewählt wurde, werden die Blöcke kopiert (einschließlich ihrer Parameter) und Sie können sie am unteren Rand des Stapels hinzufügen.
In diesem Video werden die Kommentarblöcke und die Positionierungsblöcke dupliziert. Sie können die Kommentarblöcke in Ihrem Projekt bearbeiten, um Ihr Projekt besser zu organisieren.

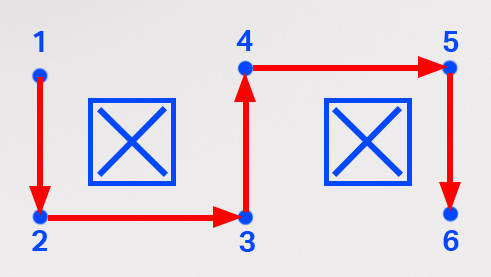
Geben Sie die Koordinaten für die letzten drei Wegpunkte in die letzten drei Positionierungsblöcke ein. Stellen Sie sicher, dass Sie die Koordinaten aus Ihrem technischen Notizbuch in der richtigen Reihenfolge eingeben und mit der endgültigen Position enden.
Beachten Sie, dass Ihre Koordinaten von den hier gezeigten abweichen, da sie auf der genauen Position Ihrer Hindernisse und den von Ihnen gesammelten Koordinaten basieren.

Stellen Sie sicher, dass der 6-Achsen-Arm mit dem VEXcode verbunden ist. Führen Sie Ihr Projekt aus.
Beobachten Sie das Verhalten des 6-Achsen-Arms. Bewegt es sich so, wie Sie es vorhergesagt haben?
Stoppen Sie das Projekt, sobald der 6-Achsen-Arm seine Bewegungen abgeschlossen hat.
Der 6-Achsen-Arm sollte sich vom Wegpunkt 1 durch die Wegpunkte 2 bis 5 bewegen und am Wegpunkt 6 enden. Wenn dies nicht der Fall ist, gehen Sie zurück und überprüfen Sie die Koordinaten, die Sie in das Projekt eingegeben haben. Stellen Sie sicher, dass die x-, y- und z-Parameter mit den Koordinaten übereinstimmen, die Sie in Ihrem technischen Notizbuch erfasst haben. Führen Sie das Projekt erneut aus, um es zu testen.
Sobald Sie erfolgreich zum Wegpunkt 6 navigiert sind, fahren Sie mit dem nächsten Schritt fort.

Benennen Sie das Projekt um und speichern Sie es auf Ihrem Gerät.
Aktivität
Nachdem Sie nun gelernt haben, wie Sie mehrere Wegpunkte finden und den 6-Achsen-Arm codieren, um einen Pfad zu navigieren, werden Sie diese Fähigkeit in der Aktivität üben. In dieser Aktivität kodieren Sie den 6-Achsen-Arm so, dass er sich entlang des vorgesehenen Pfades bewegt, um den Hindernissen auszuweichen.
- Setup:
- Zeichnen Sie drei "Halten Sie sich fern" -Positionen auf der Kachel, wie in diesem Bild gezeigt.
- Beschriften Sie Ihre Start- und Endorte A und B wie abgebildet.

Aktivität:
- Codieren Sie den 6-Achsen-Arm so, dass er sich wie oben gezeigt von Punkt A zu Punkt B bewegt.
- Notieren Sie Ihren Prozess zum Finden von Wegpunkten in Ihrem technischen Notizbuch.
- Nachdem Sie Ihr Projekt erstellt und getestet haben, führen Sie es aus, um sicherzustellen, dass das Projekt wie beabsichtigt funktioniert.
- Sobald Sie die Aktivität abgeschlossen haben, benennen Sie Ihr Projekt um und speichern Sie es auf Ihrem Gerät.
Überprüfe dein Verständnis
Bevor Sie mit der nächsten Lektion fortfahren, stellen Sie sicher, dass Sie die Konzepte in dieser Lektion verstehen, indem Sie die Fragen im folgenden Dokument in Ihrem technischen Notizbuch beantworten.
Fragen zum Verständnis prüfen > (Google Doc / .docx / .pdf)
Wählen Sie Weiter > , um Ihre Fähigkeiten in der Aktivität Alles zusammenfügen anzuwenden.