
Na Lição 2, você aprendeu a encontrar um waypoint para codificar um caminho controlado para o Braço Robótico de 6 Eixos para evitar um obstáculo. Nesta lição, você praticará como encontrar pontos de referência para evitar vários obstáculos. No final desta lição, você usará os pontos de rota que encontrou para codificar o Braço de 6 eixos para se mover e desenhar um caminho entre os obstáculos.

Múltiplos Waypoints
Em muitas situações e ambientes industriais, os braços robóticos precisarão se deslocar e contornar vários obstáculos. Você pode usar estratégias que aprendeu anteriormente para encontrar esses pontos de referência. Para praticar isso, siga estas etapas.

Comece por configurar o seu espaço com duas áreas de "exclusão" marcadas no Anexo do Quadro de Comunicações com um marcador de quadro de comunicações. Estes devem ser aproximadamente do tamanho de um cubo.
Esboce este layout no seu bloco de anotações de engenharia.

Seu Braço de 6 Eixos precisará desenhar uma linha para seguir o caminho fornecido aqui. Documente o caminho no seu bloco de anotações de engenharia.
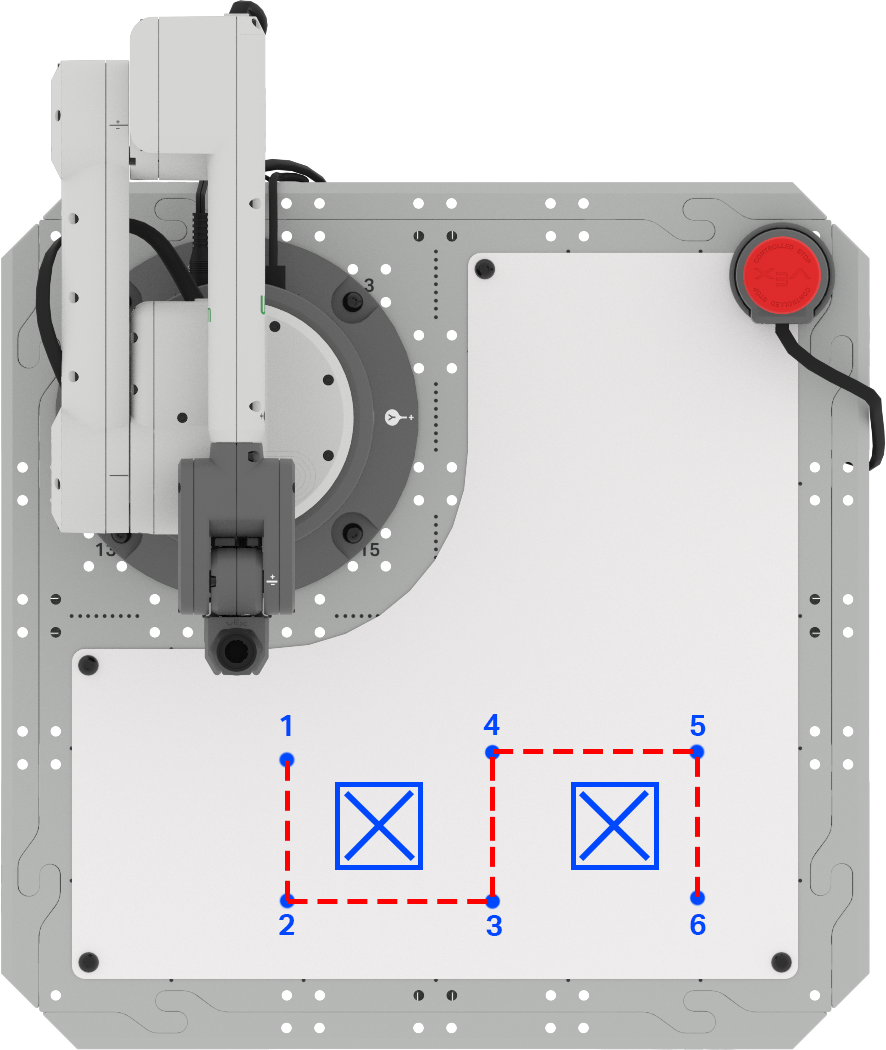
Rotule cada ponto de rota necessário no seu quadro de comunicações. Documente esses pontos de rota no seu caderno de engenharia.
Na próxima etapa, você precisará determinar as coordenadas (x, y, z) de cada waypoint. Isso pode ser feito usando a fórmula da Lição 2, ou você pode usar o Console do Monitor para coletar cada uma dessas coordenadas.
Para sua informação
Ao usar a fórmula para calcular as coordenadas desconhecidas de um waypoint, a direção que o Braço de 6 Eixos precisa percorrer ao longo de um eixo é importante. Se o Braço de 6 Eixos se mover na direção positiva x ou y, o valor de ∆x ou ∆y será positivo. Se o Braço de 6 Eixos se mover na direção negativa x ou y, o valor de ∆x ou ∆y será negativo.
Por exemplo, ao se mover do ponto de rota 3 para o ponto de rota 4, o Braço de 6 Eixos se
moverá ao longo do eixo x na direção negativa.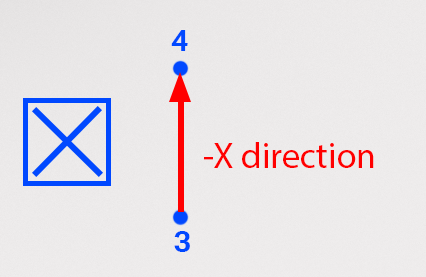
Ao usar a fórmula, o valor para ∆x será negativo. Neste exemplo, a coordenada x do
ponto 3 é de 195 mm e a distância entre os pontos 3 e 4 foi medida como sendo de 105 mm.
Usando a fórmula, podemos calcular a coordenada x do ponto 4 como sendo 90 mm, como
mostrado aqui. 

Você usou anteriormente o Console do Monitor na Unidade 3.
Para abrir a Consola do Monitor no VEXcode EXP, selecione o ícone Monitor. Certifique-se de que o seu braço de 6 eixos está ligado ao VEXCODE EXP.

Mova manualmente a extremidade do Braço de 6 eixos para cada ponto de rota e registre a coordenada (x, y, z) correspondente no seu caderno de engenharia.

Agora que tem as suas coordenadas para cada waypoint, precisa de editar o projeto VEXcode da Lição 2.
Abra o seu projeto no VEXcode EXP. Este projeto deve incluir os seguintes blocos, mas pode ter valores de coordenadas diferentes.

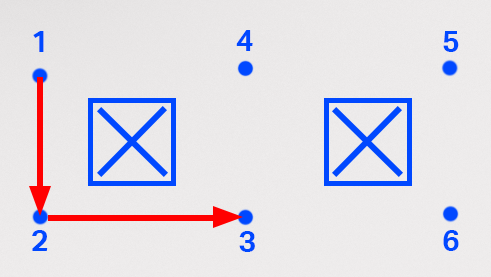
Insira as coordenadas dos pontos de rota 1, 2 e 3 nos três blocos Mover para posição em ordem. Certifique-se de usar as suas coordenadas.
Nota: Pode editar os blocos de C omento para corresponder ao projeto, selecionando o espaço e escrevendo.

Olhe para os blocos no projeto. O que acha que o Braço de 6 Eixos fará quando o projeto for executado? Documente a sua previsão no seu caderno de engenharia.

Certifique-se de que o braço de 6 eixos esteja conectado ao VEXcode. Execute o seu projeto.
Observe o comportamento do braço de 6 eixos. Ele se move como você previu?
Pare o projeto assim que o braço de 6 eixos terminar de se mover.
O Braço de 6 Eixos deve se mover do ponto de rota 1 para 2 e terminar no ponto de rota 3. Caso contrário, volte e verifique as coordenadas que colocou no projeto. Certifique-se de que os parâmetros x, y e z correspondem às coordenadas que reuniu no seu bloco de notas de engenharia. Execute o projeto novamente para testá-lo.
Depois de navegar com sucesso para o waypoint 3, passe para a próxima etapa.

Adicione três blocos Mover para posição à pilha, para que você tenha um total de seis – um para cada ponto de rota, bem como sua localização inicial e final.
Para sua informação
Também pode adicionar blocos duplicando o que já está numa pilha. Para duplicar, abra o Menu de Contexto clicando com o botão direito no bloco que deseja duplicar. Ao duplicar, todos os blocos abaixo do que selecionar serão duplicados.
Neste projeto, você pode selecionar o primeiro bloco Mover para posição para duplicar todos os três para um total de seis. Depois de selecionar "Duplicar", os blocos serão copiados (incluindo os respetivos parâmetros) e poderá adicioná-los à parte inferior da pilha.
Neste vídeo, os blocos Comentário e Mover para posição são duplicados. Pode editar os blocos de comentários no seu projeto para ajudar a mantê-lo organizado.

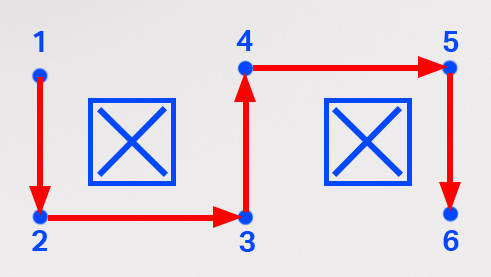
Insira as coordenadas dos três últimos pontos de rota nos três últimos blocos Mover para posição. Certifique-se de inserir as coordenadas do seu caderno de engenharia em ordem, terminando com o local final.
Tenha em atenção que as suas coordenadas variam das mostradas aqui porque se baseiam na localização exata dos seus obstáculos e nas coordenadas que reuniu.

Certifique-se de que o braço de 6 eixos esteja conectado ao VEXcode. Execute o seu projeto.
Observe o comportamento do braço de 6 eixos. Ele se move como você previu?
Pare o projeto assim que o Braço de 6 Eixos tiver concluído os seus movimentos.
O Braço de 6 Eixos deve se mover do ponto de rota 1, através dos pontos de rota 2 a 5, e terminar no ponto de rota 6. Caso contrário, volte e verifique as coordenadas que colocou no projeto. Certifique-se de que os parâmetros x, y e z correspondem às coordenadas que reuniu no seu bloco de notas de engenharia. Execute o projeto novamente para testá-lo.
Depois de navegar com sucesso para o waypoint 6, passe para a próxima etapa.

Renomeie e guarde o projeto no seu dispositivo.
Actividade
Agora que você aprendeu a encontrar vários pontos de rota e codificar o Braço de 6 Eixos para navegar por um caminho, você vai praticar essa habilidade na atividade. Nesta atividade, você codificará o Braço de 6 Eixos para se mover ao longo do caminho designado para evitar os obstáculos.
- Configuração:
- Desenhe três locais de 'exclusão' no Bloco, conforme mostrado nesta imagem.
- Rotule as suas localizações inicial e final A e B como mostrado.

Actividade:
- Codifique o braço de 6 eixos para se mover do ponto A para o ponto B ao longo do caminho, como mostrado acima.
- Registre o seu processo para encontrar waypoints no seu caderno de engenharia.
- Depois de construir e testar o seu projeto, execute-o para garantir que o projeto funcione como pretendido.
- Depois de concluir a atividade, renomeie e guarde o seu projeto no seu dispositivo.
Verifique a sua compreensão
Antes de passar para a próxima lição, certifique-se de entender os conceitos desta lição respondendo às perguntas do documento abaixo em seu caderno de engenharia.
Verifique as suas perguntas de compreensão > (Google Doc / .docx / .pdf)
Selecione Next > para aplicar as suas competências na atividade Putting It All Together.