
En la Lección 2, aprendiste a encontrar un punto de referencia para codificar una ruta controlada para el brazo robótico de 6 ejes para evitar un obstáculo. En esta lección, practicarás cómo encontrar puntos de referencia para evitar múltiples obstáculos. Al final de esta lección, usarás los puntos de referencia que encontraste para codificar el brazo de 6 ejes para moverte y dibujar un camino entre obstáculos.

Múltiples Waypoints
En muchas situaciones y entornos industriales, los brazos robóticos tendrán que desplazarse y moverse alrededor de múltiples obstáculos. Puedes usar estrategias que hayas aprendido previamente para encontrar estos puntos de referencia. Para practicar esto, siga estos pasos.

Comienza configurando tu espacio con dos áreas de "mantener fuera" marcadas en el archivo adjunto de la pizarra con un marcador de pizarra. Estos deben ser aproximadamente del tamaño de un cubo.
Dibuja este diseño en tu cuaderno de ingeniería.

Su brazo de 6 ejes tendrá que trazar una línea para seguir el camino que se proporciona aquí. Documente la ruta en su cuaderno de ingeniería.
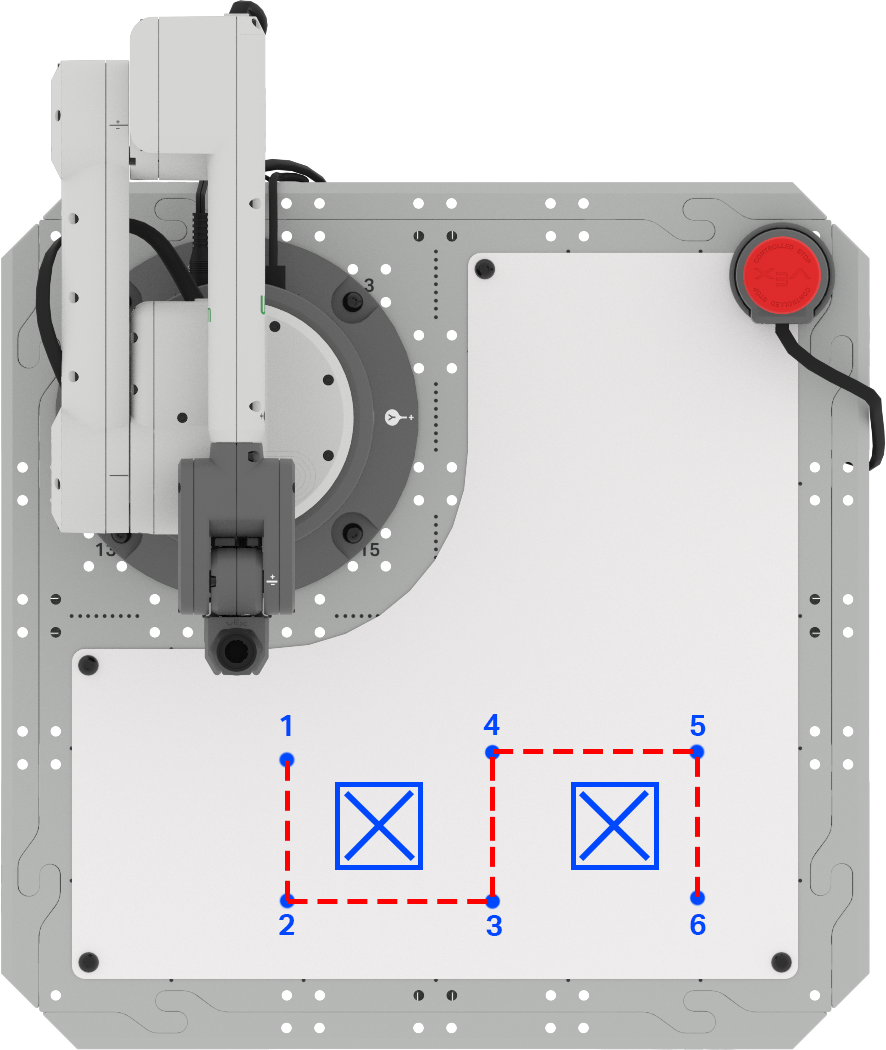
Etiqueta cada punto de referencia necesario en tu pizarra. Documente estos puntos de referencia en su cuaderno de ingeniería.
En el siguiente paso, deberás determinar las coordenadas (x, y, z) de cada punto de referencia. Esto se puede hacer usando la fórmula de la Lección 2, o puede usar la Consola del monitor para recopilar cada una de estas coordenadas.
Para su información
Cuando se utiliza la fórmula para calcular las coordenadas desconocidas de un punto de referencia, la dirección que el brazo de 6 ejes necesita para viajar a lo largo de un eje es importante. Si el brazo de 6 ejes se mueve en la dirección positiva x o y, el valor de ∆x o ∆y será positivo. Si el brazo de 6 ejes se mueve en la dirección negativa x o y, el valor de ∆x o ∆y será negativo.
Por ejemplo, al pasar del punto de referencia 3 al punto de referencia 4, el brazo de 6
ejes se moverá a lo largo del eje x en la dirección negativa.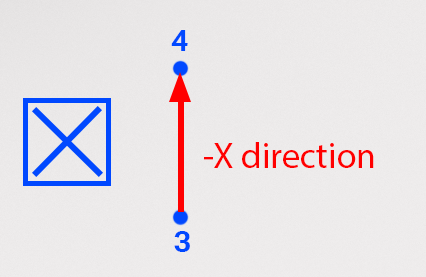
Al usar la fórmula, el valor de ∆x será negativo. En este ejemplo, la coordenada x
del punto 3 es 195 mm, y la distancia entre los puntos 3 y 4 se midió en 105 mm. Usando
la fórmula, podemos calcular que la coordenada x del punto 4 es 90 mm, como se muestra
aquí. 

Ya ha utilizado la Consola del monitor en la Unidad 3.
Para abrir la Consola del monitor en VEXcode EXP, seleccione el icono del monitor. Asegúrese de que su brazo de 6 ejes esté conectado a VEXcode EXP.

Mueva manualmente el extremo del brazo de 6 ejes a cada punto de referencia y registre las coordenadas correspondientes (x, y, z) en su cuaderno de ingeniería.

Ahora que tiene sus coordenadas para cada punto de referencia, debe editar el proyecto VEXcode de la Lección 2.
Abra su proyecto en VEXcode EXP. Este proyecto debe incluir los siguientes bloques, pero puede tener diferentes valores de coordenadas.

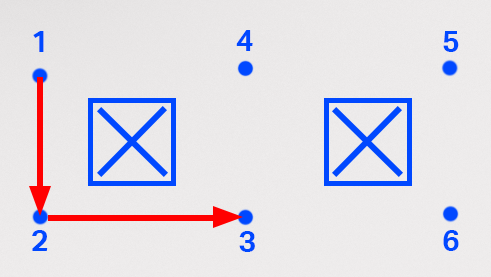
Introduzca las coordenadas de los puntos de referencia 1, 2 y 3 en los tres bloques Move to position en orden. Asegúrate de usar tus coordenadas.
Nota: Puede editar los bloques deelementos C para que coincidan con el proyecto, seleccionando el espacio y escribiendo.

Mira los bloques en el proyecto. ¿Qué crees que hará el brazo de 6 ejes cuando se ejecute el proyecto? Documente su predicción en su cuaderno de ingeniería.

Asegúrese de que el brazo de 6 ejes esté conectado a VEXcode. Ejecuta tu proyecto.
Observe el comportamiento del brazo de 6 ejes. ¿Se mueve como predijiste que lo haría?
Detenga el proyecto una vez que el brazo de 6 ejes haya terminado de moverse.
El brazo de 6 ejes debe moverse del punto de referencia 1 al 2 y terminar en el punto de referencia 3. Si no es así, vuelve atrás y comprueba las coordenadas que has puesto en el proyecto. Asegúrese de que los parámetros x, y y z coincidan con las coordenadas que recopiló en su cuaderno de ingeniería. Vuelve a ejecutar el proyecto para probarlo.
Una vez que haya navegado con éxito al punto de referencia 3, continúe con el siguiente paso.

Añade tres bloques Move to position a la pila, de modo que tengas un total de seis, uno para cada waypoint, así como tu ubicación inicial y final.
Para su información
También puede añadir bloques duplicando lo que ya está en una pila. Para duplicar, abra el Menú contextual haciendo clic con el botón derecho en el bloque que desea duplicar. Al duplicar, se duplicarán todos los bloques debajo del que selecciones.
En este proyecto, puede seleccionar el primer bloque Mover a posición para duplicar los tres para un total de seis. Una vez seleccionado 'Duplicar', se copiarán los bloques (incluyendo sus parámetros) y se podrán añadir a la parte inferior de la pila.
En este vídeo, los bloques Comentario y Mover a bloques de posición están duplicados. Puedes editar los bloques de comentarios en tu proyecto para ayudar a mantenerlo organizado.

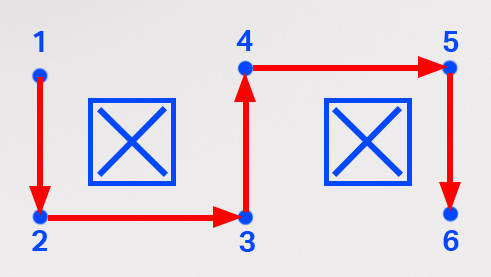
Introduzca las coordenadas de los últimos tres puntos de referencia en los últimos tres Mover a bloques de posición. Asegúrese de introducir las coordenadas de su cuaderno de ingeniería en orden, terminando con la ubicación final.
Tenga en cuenta que sus coordenadas variarán de las que se muestran aquí porque se basan en la ubicación exacta de sus obstáculos y las coordenadas que reunió.

Asegúrese de que el brazo de 6 ejes esté conectado a VEXcode. Ejecuta tu proyecto.
Observe el comportamiento del brazo de 6 ejes. ¿Se mueve como predijiste que lo haría?
Detenga el proyecto una vez que el brazo de 6 ejes haya completado sus movimientos.
El brazo de 6 ejes debe moverse desde el punto de referencia 1, a través de los puntos de referencia 2 a 5, y terminar en el punto de referencia 6. Si no es así, vuelve atrás y comprueba las coordenadas que has puesto en el proyecto. Asegúrese de que los parámetros x, y y z coincidan con las coordenadas que recopiló en su cuaderno de ingeniería. Vuelve a ejecutar el proyecto para probarlo.
Una vez que haya navegado con éxito hasta el punto de referencia 6, continúe con el siguiente paso.

Cambie el nombre y guarde el proyecto en su dispositivo.
Actividad
Ahora que has aprendido a encontrar múltiples puntos de referencia y a codificar el brazo de 6 ejes para navegar por un camino, vas a practicar esta habilidad en la actividad. En esta actividad, codificarás el brazo de 6 ejes para que se mueva a lo largo de la ruta designada para evitar los obstáculos.
- Configuración:
- Dibuje tres ubicaciones de "mantener fuera" en el mosaico como se muestra en esta imagen.
- Etiquete sus ubicaciones inicial y final A y B como se muestra.

Actividad:
- Codifique el brazo de 6 ejes para que se mueva del punto A al punto B a lo largo de la trayectoria como se muestra arriba.
- Registre su proceso para encontrar puntos de referencia en su cuaderno de ingeniería.
- Después de construir y probar su proyecto, ejecútelo para asegurarse de que el proyecto funcione según lo previsto.
- Una vez que haya completado la actividad, cambie el nombre y guarde su proyecto en su dispositivo.
Compruebe su comprensión
Antes de pasar a la siguiente lección, asegúrate de comprender los conceptos de esta lección respondiendo las preguntas del siguiente documento en tu cuaderno de ingeniería.
Verifique sus preguntas de comprensión > (Google Doc / .docx / .pdf)
Seleccione Siguiente > para aplicar sus habilidades en la actividad Ponerlo todo junto.