
ในบทเรียนที่ 2 ท่านได้เรียนรู้วิธีหาเส้นทางเพื่อกำหนดเส้นทางควบคุมสำหรับแขนหุ่นยนต์ 6 แกนเพื่อหลีกเลี่ยงสิ่งกีดขวาง ในบทเรียนนี้ท่านจะฝึกหาจุดทางเพื่อหลีกเลี่ยงอุปสรรคหลายอย่าง ในตอนท้ายของบทเรียนนี้ท่านจะใช้จุดนำทางที่พบเพื่อกำหนดรหัสแขน 6 แกนเพื่อเคลื่อนที่และวาดเส้นทางระหว่างสิ่งกีดขวาง

หลายจุดเชื่อมต่อ
ในหลายๆสถานการณ์และการตั้งค่าอุตสาหกรรมแขนหุ่นยนต์จะต้องเดินทางและเคลื่อนที่ไปรอบๆสิ่งกีดขวางหลายอย่าง คุณสามารถใช้กลยุทธ์ที่คุณได้เรียนรู้มาก่อนหน้านี้เพื่อค้นหาจุดทางเหล่านี้ หากต้องการฝึกฝนให้ทำตามขั้นตอนเหล่านี้

เริ่มต้นด้วยการตั้งค่าที่พักของคุณด้วยพื้นที่ "กัน" สองแห่งที่ทำเครื่องหมายไว้บนสิ่งที่แนบมากับไวท์บอร์ดที่มีเครื่องหมายไวท์บอร์ด สิ่งเหล่านี้ควรมีขนาดประมาณลูกบาศก์
ร่างเค้าโครงนี้ในสมุดบันทึกวิศวกรรมของคุณ

แขน 6 แกนของคุณจะต้องลากเส้นเพื่อไปตามเส้นทางที่ให้ไว้ที่นี่ บันทึกเส้นทางในสมุดบันทึกวิศวกรรมของคุณ
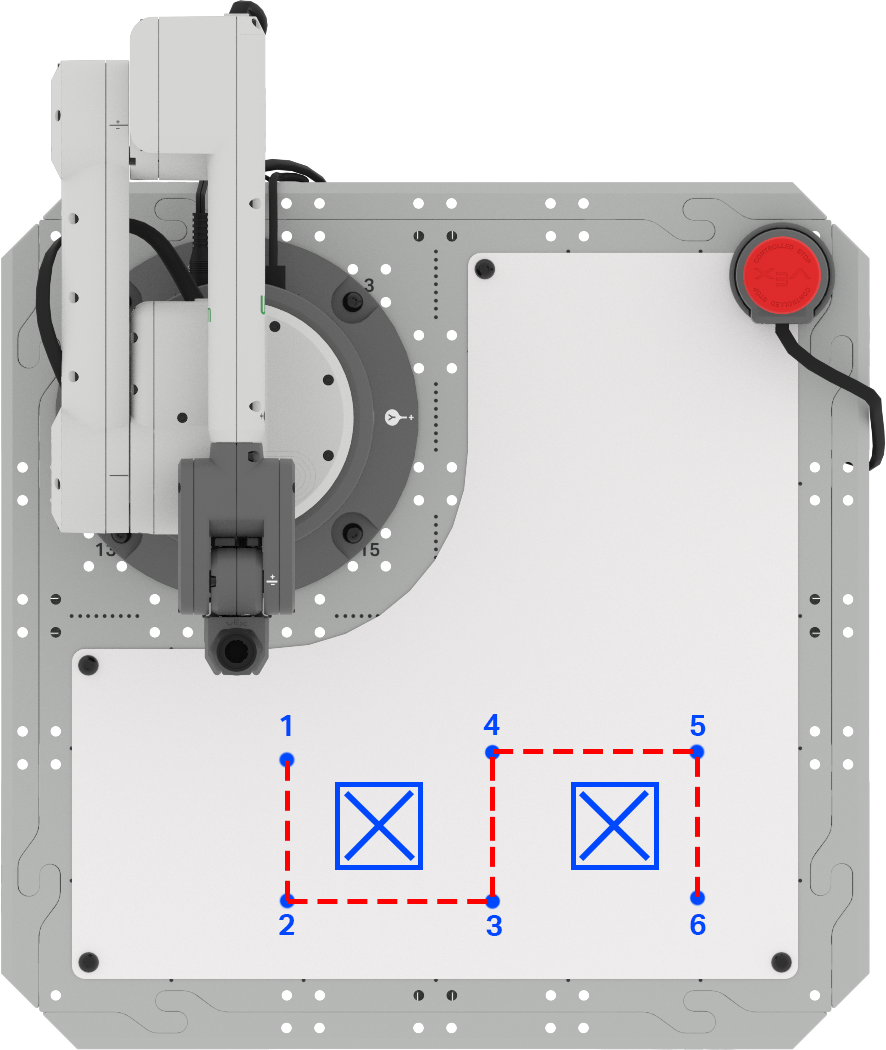
ติดป้ายกำกับแต่ละจุดที่ต้องใช้บนไวท์บอร์ดของคุณ บันทึกจุดอ้างอิงเหล่านี้ลงในสมุดบันทึกวิศวกรรมของคุณ
ในขั้นตอนต่อไปคุณจะต้องกำหนดพิกัด (x, y, z) ของแต่ละเส้นทาง ซึ่งสามารถทำได้โดยใช้สูตรจากบทเรียนที่ 2 หรือคุณสามารถใช้คอนโซลหน้าจอเพื่อรวบรวมแต่ละพิกัดเหล่านี้
สำหรับข้อมูลของคุณ
เมื่อใช้สูตรเพื่อคำนวณพิกัดที่ไม่รู้จักของจุดทางทิศทางที่แขน 6 แกนต้องเดินทางไปตามแกนเป็นสิ่งสำคัญ หากแขน 6 แกนจะเคลื่อนที่ไปในทิศทางบวก x หรือ y ค่าของ Ω x หรือ Ω y จะเป็นบวก หากแขน 6 แกนจะเคลื่อนที่ไปในทิศทางลบ x หรือ y ค่าของ ´ x หรือ ´ y จะเป็นลบ
ตัวอย่างเช่นเมื่อเคลื่อนที่จากจุดทางที่ 3 ไปยังจุดทางที่ 4 แขนแกน 6 จะเคลื่อนที่ไปตามแกน
x ในทิศทางลบ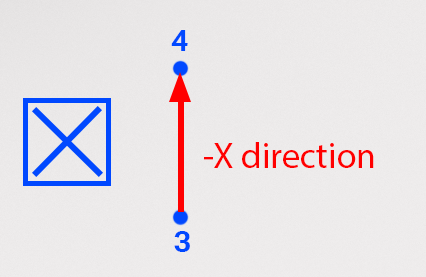
เมื่อใช้สูตรค่าสำหรับ ̍ x จะเป็นลบ ในตัวอย่างนี้พิกัด x ของจุด 3 คือ 195 มม.
และระยะห่างระหว่างจุด 3 และ 4 ถูกวัดที่ 105 มม. โดยใช้สูตรเราสามารถคำนวณพิกัด x ของจุด 4
ให้เป็น 90 มม. ดังแสดงที่นี่ 

ก่อนหน้านี้คุณเคยใช้คอนโซลมอนิเตอร์ในหน่วยที่ 3
หากต้องการเปิดคอนโซลมอนิเตอร์ใน VEXcode EXP ให้เลือกไอคอนมอนิเตอร์ ตรวจสอบให้แน่ใจว่าแขน 6 แกนของคุณเชื่อมต่อกับ VEXcode EXP

ย้ายปลายแขน 6 แกนไปยังแต่ละเส้นทางด้วยตนเองและบันทึกพิกัด (x, y, z) ที่สอดคล้องกันในสมุดบันทึกวิศวกรรมของคุณ

ตอนนี้คุณมีพิกัดของแต่ละเส้นทางแล้วคุณต้องแก้ไขโครงการ VEXcode จากบทเรียนที่ 2
เปิดโปรเจกต์ของคุณใน VEXcode EXP. โปรเจกต์นี้ควรมีบล็อคต่อไปนี้แต่อาจมีค่าพิกัดที่แตกต่างกัน

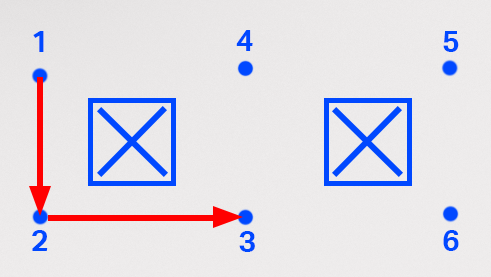
ป้อนพิกัดของทางจุดที่ 1, 2 และ 3 ลงในสาม ย้ายไปยังตำแหน่ง บล็อกตามลำดับ อย่าลืมใช้พิกัดของคุณ
หมายเหตุ: คุณสามารถแก้ไข C omment blocks ให้ตรงกับโปรเจกต์ได้โดยเลือกที่พักและพิมพ์

ดูบล็อก ในโปรเจกต์ คุณคิดว่าแขน 6 แกนจะทำอะไรเมื่อโครงการดำเนินการ? บันทึกการคาดการณ์ของคุณลงในสมุดบันทึกวิศวกรรมของคุณ

ตรวจสอบให้แน่ใจว่าแขน 6 แกนเชื่อมต่อกับ VEXcode แล้ว เรียกใช้โปรเจกต์ของคุณ
สังเกตพฤติกรรมของแขน 6 แกน มันเคลื่อนไหวตามที่คุณคาดการณ์ไว้หรือไม่?
หยุดโครงการเมื่อแขน 6 แกนเคลื่อนที่เสร็จแล้ว
แขน 6 แกนควรเคลื่อนจากจุดทางที่ 1 ไปยัง 2 และสิ้นสุดที่จุดทางที่ 3 หากไม่เป็นเช่นนั้นให้กลับไปตรวจสอบพิกัดที่คุณใส่ไว้ในโครงการ ตรวจสอบให้แน่ใจว่าพารามิเตอร์ x, y และ z ตรงกับพิกัดที่คุณรวบรวมไว้ในสมุดบันทึกวิศวกรรมของคุณ เรียกใช้โปรเจกต์อีกครั้งเพื่อทดสอบ
เมื่อคุณนำทางไปยังเส้นทางที่ 3 เรียบร้อยแล้วให้ไปยังขั้นตอนต่อไป

เพิ่ม ย้ายสามรายการไป ยังบล็อคตำแหน่งในกองซ้อนเพื่อให้คุณมีทั้งหมดหก – หนึ่งรายการสำหรับแต่ละเส้นทางรวมถึงตำแหน่งเริ่มต้นและสิ้นสุดของคุณ
สำหรับข้อมูลของคุณ
นอกจากนี้คุณยังสามารถเพิ่มบล็อกโดยการทำซ้ำสิ่งที่มีอยู่แล้วในสแต็ก หากต้องการทำซ้ำให้เปิดเมนูบริบทโดยคลิกขวาที่บล็อกที่คุณต้องการทำซ้ำ เมื่อทำซ้ำทุกบล็อกใต้บล็อกที่คุณเลือกจะถูกทำซ้ำ
ในโปรเจกต์นี้คุณสามารถเลือก บล็อก ย้ายไปยังตำแหน่งแรกเพื่อทำซ้ำทั้งสามบล็อกรวมเป็นหกบล็อก เมื่อเลือก 'ทำซ้ำ' แล้วบล็อกจะถูกคัดลอก (รวมถึงพารามิเตอร์) และคุณสามารถเพิ่มลงในด้านล่างของกองซ้อนได้
ในวิดีโอนี้ บล็อก ความคิดเห็นและบล็อก ย้ายไปยัง ตำแหน่งจะซ้ำกัน คุณสามารถแก้ไข บล็อก ความคิดเห็นในโปรเจกต์ของคุณเพื่อช่วยให้โปรเจกต์ของคุณเป็นระเบียบ

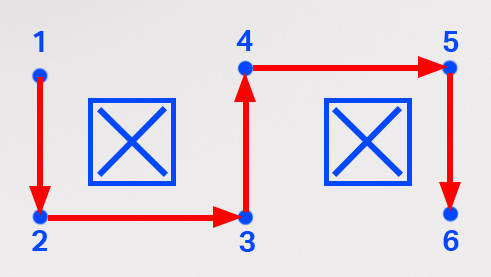
ป้อนพิกัดสำหรับจุดทางสามจุดสุดท้ายลงใน บล็อก ย้ายไปยังตำแหน่งสามจุดสุดท้าย อย่าลืมป้อนพิกัดจากสมุดบันทึกวิศวกรรมของคุณตามลำดับและลงท้ายด้วยตำแหน่งสุดท้าย
โปรดทราบว่าพิกัดของคุณจะแตกต่างจากที่แสดงที่นี่เนื่องจากขึ้นอยู่กับตำแหน่งที่แน่นอนของสิ่งกีดขวางและพิกัดที่คุณรวบรวมมา

ตรวจสอบให้แน่ใจว่าแขน 6 แกนเชื่อมต่อกับ VEXcode แล้ว เรียกใช้โปรเจกต์ของคุณ
สังเกตพฤติกรรมของแขน 6 แกน มันเคลื่อนไหวตามที่คุณคาดการณ์ไว้หรือไม่?
หยุดโครงการเมื่อแขน 6 แกนเคลื่อนที่เสร็จแล้ว
แขน 6 แกนควรเคลื่อนที่จากจุดทางที่ 1 ผ่านจุดทางที่ 2 ถึง 5 และสิ้นสุดที่จุดทางที่ 6 หากไม่เป็นเช่นนั้นให้กลับไปตรวจสอบพิกัดที่คุณใส่ไว้ในโครงการ ตรวจสอบให้แน่ใจว่าพารามิเตอร์ x, y และ z ตรงกับพิกัดที่คุณรวบรวมไว้ในสมุดบันทึกวิศวกรรมของคุณ เรียกใช้โปรเจกต์อีกครั้งเพื่อทดสอบ
เมื่อคุณนำทางไปยังเส้นทางที่ 6 เรียบร้อยแล้วให้ไปยังขั้นตอนต่อไป

เปลี่ยนชื่อและบันทึกโปรเจกต์ลงในอุปกรณ์ของคุณ
กิจกรรม
ตอนนี้คุณได้เรียนรู้วิธีหาจุดนำทางหลายจุดและตั้งรหัสแขน 6 แกนเพื่อนำทางไปยังเส้นทางแล้วคุณจะได้ฝึกฝนทักษะนี้ในกิจกรรม ในกิจกรรมนี้คุณจะต้องใส่รหัสแขน 6 แกนเพื่อเคลื่อนที่ไปตามเส้นทางที่กำหนดเพื่อหลีกเลี่ยงสิ่งกีดขวาง
- การตั้งค่า:
- วาดตำแหน่ง 'เก็บออก' สามตำแหน่งบนไทล์ดังที่แสดงในภาพนี้
- ติดป้ายตำแหน่งเริ่มต้นและสิ้นสุดของคุณ A และ B ตามที่แสดง

กิจกรรม:
- เขียนรหัสแขน 6 แกนเพื่อย้ายจากจุด A ไปยังจุด B ตามเส้นทางตามที่แสดงไว้ด้านบน
- บันทึกกระบวนการของคุณสำหรับการค้นหาจุดอ้างอิงในสมุดบันทึกวิศวกรรมของคุณ
- หลังจากสร้างและทดสอบโครงการของคุณแล้วให้ดำเนินการเพื่อให้แน่ใจว่าโครงการทำงานได้ตามที่ตั้งใจไว้
- เมื่อคุณทำกิจกรรมเสร็จแล้วให้เปลี่ยนชื่อและบันทึกโปรเจกต์ลงในอุปกรณ์ของคุณ
ตรวจสอบความเข้าใจของคุณ
ก่อนที่จะย้ายไปยังบทเรียนถัดไปตรวจสอบให้แน่ใจว่าท่านเข้าใจแนวคิดในบทเรียนนี้โดยตอบคำถามในเอกสารด้านล่างในสมุดบันทึกวิศวกรรมของท่าน
ตรวจสอบคำถามเกี่ยวกับความเข้าใจของ คุณ > ( Google Doc /.docx /.pdf)
เลือก ถัด > ไปเพื่อใช้ทักษะของคุณในกิจกรรม Putting It All Together