
레슨 3: 다중 웨이포인트
2과에서는 6축 로봇팔이 장애물을 피하기 위해 제어된 경로를 코딩하기 위한 경로점을 찾는 방법을 배웠습니다. 이 수업에서는 여러 장애물을 피하기 위한 경로점을 찾는 연습을 하게 됩니다. 이 수업을 마치면 찾은 경로점을 사용하여 6축 팔을 코딩하여 움직이고 장애물 사이에 경로를 그립니다.

여러 개의 웨이포인트
많은 상황과 산업 현장에서 로봇 팔은 여러 장애물을 피해 이동해야 합니다. 이전에 학습한 전략을 사용하여 이러한 경로점을 찾을 수 있습니다. 이를 연습하려면 다음 단계를 따르세요.
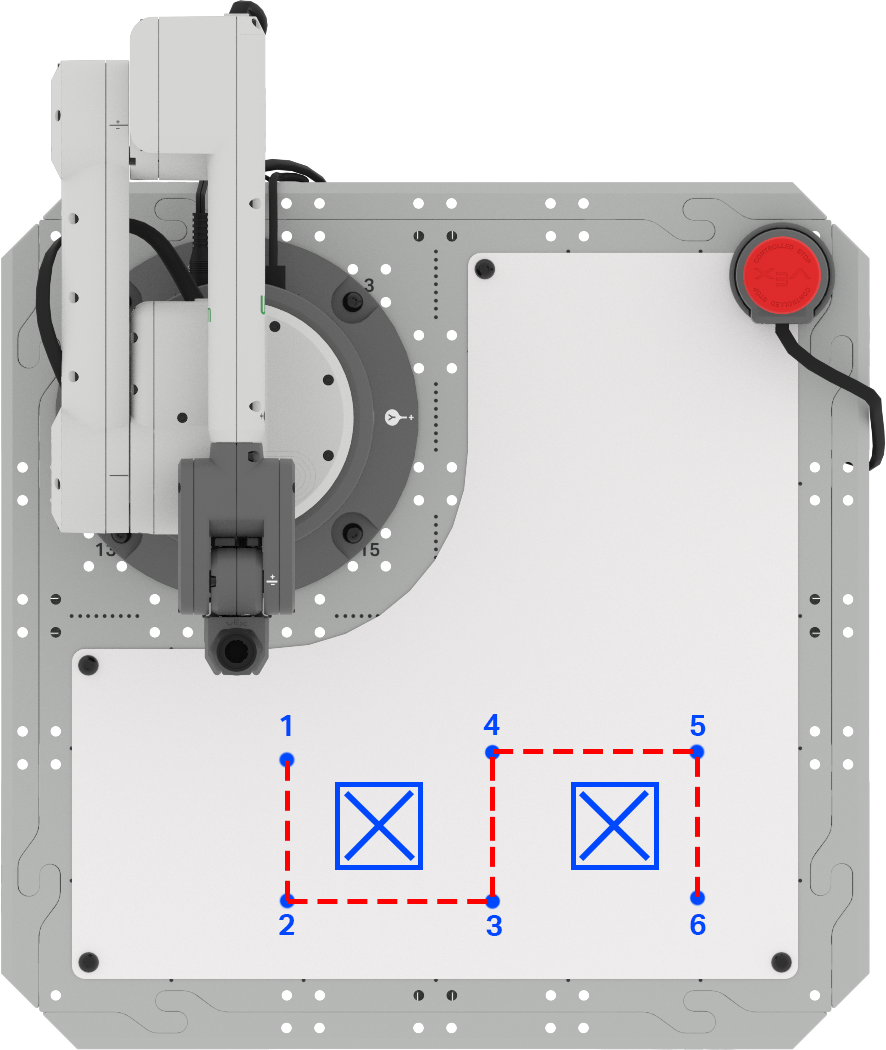
화이트보드 부착물에 화이트보드 마커를 사용하여 "출입 금지" 구역 두 개를 표시하여 공간을 설정하세요. 이 크기는 대략 큐브 정도여야 합니다.
엔지니어링 노트북에 이 레이아웃을 스케치하세요.

6축 암은 여기에 제공된 경로를 따라 선을 그려야 합니다. 엔지니어링 노트북에 경로를 기록하세요.

필요한 각 경유지를 화이트보드에 표시하세요. 엔지니어링 노트북에 이러한 경로점을 기록하세요.
다음 단계에서는 각 경유지의 (x, y, z) 좌표를 결정해야 합니다. 이 작업은 레슨 2의 공식을 사용하여 수행할 수도 있고, 모니터 콘솔을 사용하여 각 좌표를 수집할 수도 있습니다.
귀하의 정보를 위해
경로점의 알려지지 않은 좌표를 계산하기 위해 공식을 사용할 때, 6축 암이 축을 따라 이동해야 하는 방향이 중요합니다. 6축 암이 양의 x 또는 y 방향으로 움직이는 경우 ∆x 또는 ∆y 값은 양수가 됩니다. 6축 암이 음의 x 또는 y 방향으로 움직이는 경우 ∆x 또는 ∆y 값은 음수가 됩니다.
예를 들어, 웨이포인트 3에서 웨이포인트 4로 이동할 때 6축 암은 x축을 따라 음의 방향으로 이동합니다.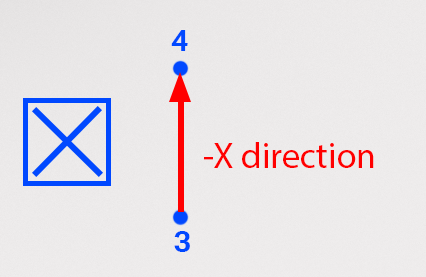
이 공식을 사용하면 ∆x 값은 음수가 됩니다. 이 예에서, 점 3의 x 좌표는 195mm이고, 점 3과 4 사이의 거리는 105mm로 측정되었습니다. 공식을 사용하면 여기에 표시된 것처럼 점 4의 x좌표를 90mm로 계산할 수 있습니다. 
이전에 3단원에서 모니터 콘솔을 사용했습니다.
VEXcode EXP에서 모니터 콘솔을 열려면 모니터 아이콘을 선택하세요. 6축 암이 VEX코드 EXP에 연결되어 있는지 확인하세요.

6축 암의 끝을 각 경로점으로 수동으로 이동하고 엔지니어링 노트북에 해당 좌표(x, y, z)를 기록합니다.

이제 각 경로점의 좌표를 알았으니, 2차시 수업에서 배운 VEXcode 프로젝트를 편집해야 합니다.
VEXcode EXP에서 프로젝트를 엽니다. 이 프로젝트에는 다음 블록이 포함되어야 하지만 좌표 값은 다를 수 있습니다.

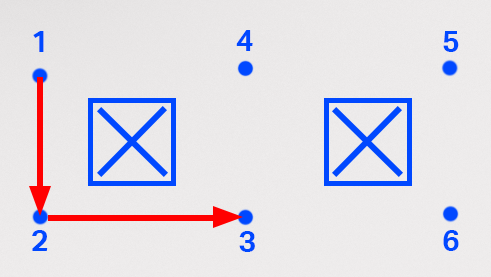
1, 2, 3의 경로점 좌표를 3개의 이동 위치 블록에 순서대로 입력합니다. 반드시 좌표를 사용하세요.
참고: 프로젝트에 맞게 Comment 블록을 편집하려면 공백을 선택하고 입력하세요.

프로젝트의 블록을 살펴보세요. 이 프로젝트가 실행되면 6축 암이 어떤 역할을 할 것으로 생각하시나요? 엔지니어링 노트북에 예측 내용을 기록하세요.

6축 암이 VEX코드에 연결되어 있는지 확인하세요. 프로젝트를 실행하세요.
6축 암의 동작을 관찰하세요. 예상한 대로 움직이나요?

6축 팔의 움직임이 끝나면 프로젝트를 중지합니다.
6축 암은 웨이포인트 1에서 웨이포인트 2로 이동하고 웨이포인트 3에서 끝나야 합니다. 그렇지 않은 경우, 돌아가서 프로젝트에 입력한 좌표를 확인하세요. x, y, z 매개변수가 엔지니어링 노트북에 수집한 좌표와 일치하는지 확인하세요. 프로젝트를 다시 실행하여 테스트해 보세요.
3번째 경로지점까지 성공적으로 이동했다면 다음 단계로 넘어가세요.
위치 이동 블록 3개를 스택에 추가하여 각 웨이포인트와 시작 및 종료 위치에 하나씩 총 6개가 됩니다.

귀하의 정보를 위해
이미 스택에 있는 것을 복제하여 블록을 추가할 수도 있습니다. 복제하려면 복제하려는 블록을 마우스 오른쪽 버튼으로 클릭하여 상황에 맞는 메뉴를 엽니다. 복제할 때, 선택한 블록 아래의 모든 블록이 복제됩니다.
이 프로젝트에서는 처음 블록을 선택하여 위치로 이동하여 3개를 모두 복제하여 총 6개를 만들 수 있습니다. '복제'를 선택하면 블록이 복사되고(매개변수도 포함) 스택의 맨 아래에 추가할 수 있습니다.
이 영상에서는 댓글 블록과 위치 으로 이동 블록을 마우스 오른쪽 버튼으로 클릭하여 컨텍스트 메뉴를 열고 맨 위의 옵션인 '복제'를 선택하여 복제합니다. 복제된 블록은 프로젝트 하단에 부착됩니다. 프로젝트를 체계적으로 정리하는 데 도움이 되도록 프로젝트에서 댓글 블록을 편집할 수 있습니다.
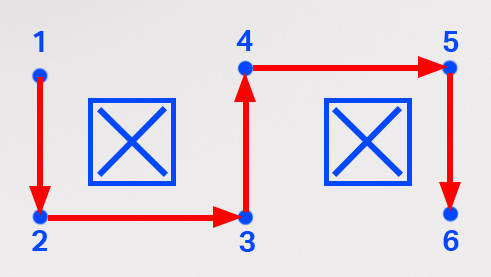
마지막 3개의 경로점에 대한 좌표를 마지막 3개의 블록에 입력하여 위치 로 이동합니다. 엔지니어링 노트북에서 좌표를 순서대로 입력하고, 최종 위치까지 입력하세요.
여기에 표시된 좌표는 장애물의 정확한 위치와 수집한 좌표를 기반으로 하므로 사용자의 좌표는 여기에 표시된 좌표와 다를 수 있습니다.

6축 암이 VEX코드에 연결되어 있는지 확인하세요. 프로젝트를 실행하세요.
6축 암의 동작을 관찰하세요. 예상한 대로 움직이나요?

6축 암이 움직임을 완료하면 프로젝트를 중지합니다.
6축 암은 경유지 1에서 출발하여 경유지 2~5를 거쳐 경유지 6에서 끝나야 합니다. 그렇지 않은 경우, 돌아가서 프로젝트에 입력한 좌표를 확인하세요. x, y, z 매개변수가 엔지니어링 노트북에 수집한 좌표와 일치하는지 확인하세요. 프로젝트를 다시 실행하여 테스트해 보세요.
6번 경로지점까지 성공적으로 이동했다면 다음 단계로 넘어가세요.
프로젝트의 이름을 바꾸고 장치에 저장합니다.

활동
이제 여러 경로점을 찾고 6축 팔을 코딩하여 경로를 탐색하는 방법을 배웠으므로 이 활동에서 이 기술을 연습해 보겠습니다. 이 활동에서는 6축 팔을 코딩하여 지정된 경로를 따라 이동하고 장애물을 피하도록 합니다.
- 설정:
- 이 이미지에 표시된 대로 타일에 '출입 금지' 위치 3개를 그립니다.
- 표시된 대로 시작 위치와 도착 위치를 A와 B로 표시합니다.

활동:
- 위에 표시된 경로를 따라 A 지점에서 B 지점으로 이동하도록 6축 팔을 코딩합니다.
- 엔지니어링 노트북에 경로점을 찾는 과정을 기록하세요.
- 프로젝트를 빌드하고 테스트한 후 실행하여 프로젝트가 의도한 대로 작동하는지 확인하세요.
- 활동을 완료한 후 프로젝트의 이름을 바꾸고 장치에 저장하세요.
이해도 확인
다음 수업으로 넘어가기 전에 엔지니어링 노트북에서 아래 문서의 질문에 답하여 이 수업의 개념을 이해했는지 확인하세요.
이해도 확인 질문 > (Google Doc / .docx / .pdf)
Putting It All Together 활동에서 여러분의 기술을 적용하려면 다음 > 선택하세요.