
Les 3: Meerdere waypoints
In les 2 hebt u geleerd hoe u een waypoint kunt vinden om een gecontroleerd pad te coderen voor de 6-assige robotarm om een obstakel te vermijden. In deze les oefent u het vinden van waypoints om verschillende obstakels te vermijden. Aan het einde van deze les gebruikt u de gevonden waypoints om de 6-assige arm te programmeren, zodat deze tussen obstakels kan bewegen en een pad kan tekenen.

Meerdere waypoints
In veel situaties en industriële omgevingen moeten robotarmen langs meerdere obstakels kunnen rijden en bewegen. Om deze waypoints te vinden, kunt u strategieën gebruiken die u eerder hebt geleerd. Om dit te oefenen, volgt u deze stappen.
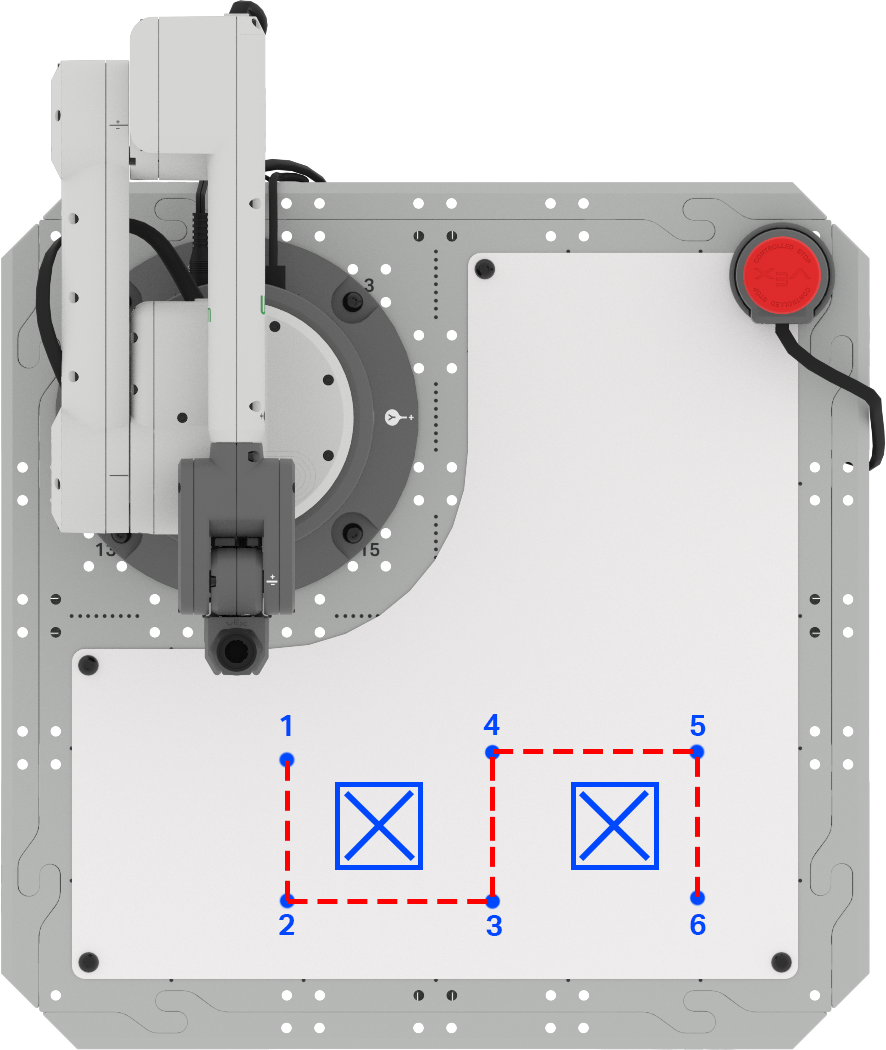
Begin met het inrichten van uw ruimte door twee "verboden" gebieden te markeren op de whiteboardbevestiging met een whiteboardmarker. Deze moeten ongeveer de grootte van een kubus hebben.
Maak een schets van deze indeling in uw technisch notitieboekje.

Uw 6-assige arm moet een lijn tekenen die het hier aangegeven pad volgt. Leg het pad vast in uw technisch notitieboekje.

Geef elk waypoint dat u nodig hebt een label op uw whiteboard. Noteer deze waypoints in uw technisch notitieboekje.
In de volgende stap moet u de (x, y, z)-coördinaten van elk waypoint bepalen. U kunt dit doen met behulp van de formule uit Les 2, of u kunt de Monitor Console gebruiken om elk van deze coördinaten te verzamelen.
Ter informatie
Bij het gebruiken van de formule om de onbekende coördinaten van een waypoint te berekenen, is de richting waarin de 6-assige arm langs een as moet bewegen van belang. Als de 6-assige arm in de positieve x- of y-richting beweegt, zal de waarde van ∆x of ∆y positief zijn. Als de 6-assige arm in de negatieve x- of y-richting beweegt, zal de waarde van ∆x of ∆y negatief zijn.
Wanneer u bijvoorbeeld van waypoint 3 naar waypoint 4 beweegt, beweegt de 6-assige arm langs de x-as in negatieve richting.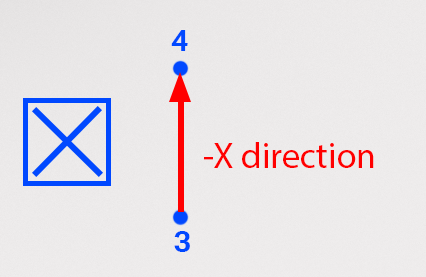
Wanneer u de formule gebruikt, zal de waarde voor ∆x negatief zijn. In dit voorbeeld is de x-coördinaat van punt 3 195 mm en de afstand tussen punt 3 en 4 is gemeten op 105 mm. Met behulp van de formule kunnen we berekenen dat de x-coördinaat van punt 4 90 mm bedraagt, zoals hier weergegeven. 
U hebt de Monitor Console al eerder gebruikt in Unit 3.
Om de Monitor Console in VEXcode EXP te openen, selecteert u het Monitor-pictogram. Zorg ervoor dat uw 6-assige arm is aangesloten op VEXcode EXP.

Verplaats het uiteinde van de 6-assige arm handmatig naar elk waypoint en noteer de bijbehorende (x, y, z) coördinaten in uw technisch notitieboekje.

Nu u de coördinaten voor elk waypoint hebt, moet u het VEXcode-project uit Les 2 bewerken.
Open uw project in VEXcode EXP. Dit project moet de volgende blokken bevatten, maar kan andere coördinaatwaarden hebben.

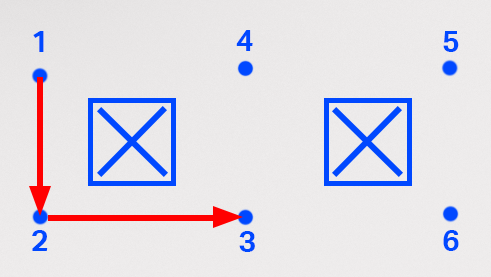
Voer de coördinaten van de waypoints 1, 2 en 3 in de drie blokken in in de juiste volgorde. Zorg ervoor dat u uw coördinaten gebruikt.
Let op: U kunt de blokken Comment bewerken zodat ze overeenkomen met het project, door de spatie te selecteren en te typen.

Kijk naar de blokken in het project. Wat denkt u dat de 6-assige arm zal doen als het project wordt uitgevoerd? Noteer uw voorspelling in uw technisch notitieboekje.

Zorg ervoor dat de 6-assige arm is aangesloten op VEXcode. Voer uw project uit.
Observeer het gedrag van de 6-assige arm. Beweegt het zoals je voorspeld had?

Stop het project zodra de 6-assige arm klaar is met bewegen.
De 6-assige arm moet van waypoint 1 naar waypoint 2 bewegen en eindigen bij waypoint 3. Als dat niet het geval is, controleer dan de coördinaten die u in het project hebt ingevoerd. Zorg ervoor dat de x-, y- en z-parameters overeenkomen met de coördinaten die u in uw technisch notitieboekje hebt verzameld. Voer het project opnieuw uit om het te testen.
Zodra u succesvol naar waypoint 3 bent genavigeerd, gaat u door naar de volgende stap.
Voeg drie Verplaats naar positie blokken toe aan de stapel, zodat je in totaal zes hebt: één voor elk waypoint, plus je start- en eindlocatie.

Ter informatie
Je kunt ook blokken toevoegen door te dupliceren wat er al in een stapel zit. Om te dupliceren, opent u het contextmenu door met de rechtermuisknop op het blok te klikken dat u wilt dupliceren. Bij dupliceren wordt elk blok onder het geselecteerde blok gedupliceerd.
In dit project kunt u het eerste Verplaats naar positie blok selecteren om alle drie te dupliceren voor een totaal van zes. Zodra u 'Dupliceren' selecteert, worden de blokken gekopieerd (inclusief hun parameters) en kunt u ze onderaan de stapel toevoegen.
In deze video worden de blokken Commentaar en Verplaats naar positie gedupliceerd door met de rechtermuisknop te klikken om het contextmenu te openen en de bovenste optie 'dupliceren' te selecteren. De gedupliceerde blokken worden onderaan het project bevestigd. U kunt de blokken Reactie in uw project bewerken om uw project georganiseerd te houden.
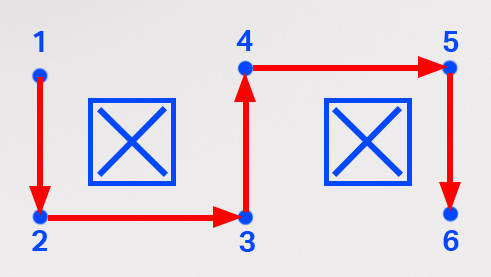
Voer de coördinaten voor de laatste drie waypoints in de laatste drie Verplaats naar positie blokken in. Zorg ervoor dat u de coördinaten uit uw technisch notitieboekje in de juiste volgorde invoert, eindigend met de eindlocatie.
Houd er rekening mee dat uw coördinaten kunnen afwijken van de hier getoonde coördinaten, omdat ze gebaseerd zijn op de exacte locatie van uw obstakels en de coördinaten die u hebt verzameld.

Zorg ervoor dat de 6-assige arm is aangesloten op VEXcode. Voer uw project uit.
Observeer het gedrag van de 6-assige arm. Beweegt het zoals je voorspeld had?

Stop het project zodra de 6-assige arm zijn bewegingen heeft voltooid.
De 6-assige arm moet van waypoint 1, via waypoints 2 tot en met 5, bewegen en eindigen bij waypoint 6. Als dat niet het geval is, controleer dan de coördinaten die u in het project hebt ingevoerd. Zorg ervoor dat de x-, y- en z-parameters overeenkomen met de coördinaten die u in uw technisch notitieboekje hebt verzameld. Voer het project opnieuw uit om het te testen.
Zodra u succesvol naar waypoint 6 bent genavigeerd, gaat u door naar de volgende stap.
Geef het project een nieuwe naam en sla het op op uw apparaat.

Activiteit
Nu u hebt geleerd hoe u meerdere waypoints kunt vinden en de 6-assige arm kunt programmeren om een pad te navigeren, gaat u deze vaardigheid in de activiteit oefenen. In deze activiteit programmeert u de 6-assige arm zodanig dat deze langs het aangegeven pad beweegt om obstakels te vermijden.
- Instellen:
- Teken drie 'verboden' locaties op de tegel, zoals in deze afbeelding.
- Markeer uw start- en eindpunt met A en B zoals afgebeeld.

Activiteit:
- Programmeer de 6-assige arm zodat deze van punt A naar punt B beweegt langs het pad zoals hierboven weergegeven.
- Noteer uw proces voor het vinden van waypoints in uw technisch notitieboekje.
- Nadat u uw project hebt gebouwd en getest, voert u het uit om te controleren of het werkt zoals bedoeld.
- Zodra u de activiteit hebt voltooid, geeft u het project een nieuwe naam en slaat u het op op uw apparaat.
Controleer uw begrip
Voordat u doorgaat naar de volgende les, moet u ervoor zorgen dat u de concepten in deze les begrijpt door de vragen in het onderstaande document in uw technische notitieboekje te beantwoorden.
Controleer uw begrip vragen > (Google Doc / .docx / .pdf)
Selecteer Volgende > om je vaardigheden toe te passen in de activiteit Alles bij elkaar brengen.