
Dans la leçon 2, vous avez appris à trouver un point de cheminement pour coder un chemin contrôlé pour le bras robotique à 6 axes afin d'éviter un obstacle. Dans cette leçon, vous vous entraînerez à trouver des points de cheminement pour éviter de multiples obstacles. À la fin de cette leçon, vous utiliserez les points de cheminement que vous avez trouvés pour coder le bras à 6 axes pour vous déplacer et tracer un chemin entre les obstacles.

Plusieurs points de cheminement
Dans de nombreuses situations et dans de nombreux contextes industriels, les bras robotisés devront se déplacer et contourner de multiples obstacles. Vous pouvez utiliser des stratégies que vous avez précédemment apprises afin de trouver ces points de cheminement. Pour vous entraîner, suivez ces étapes.

Commencez par configurer votre espace avec deux zones « à éviter » marquées sur la pièce jointe du tableau blanc avec un marqueur de tableau blanc. Ceux-ci devraient avoir à peu près la taille d'un Cube.
Esquissez cette mise en page dans votre cahier d'ingénierie.

Votre bras à 6 axes devra tracer une ligne pour suivre le chemin fourni ici. Documentez le chemin dans votre cahier d'ingénierie.
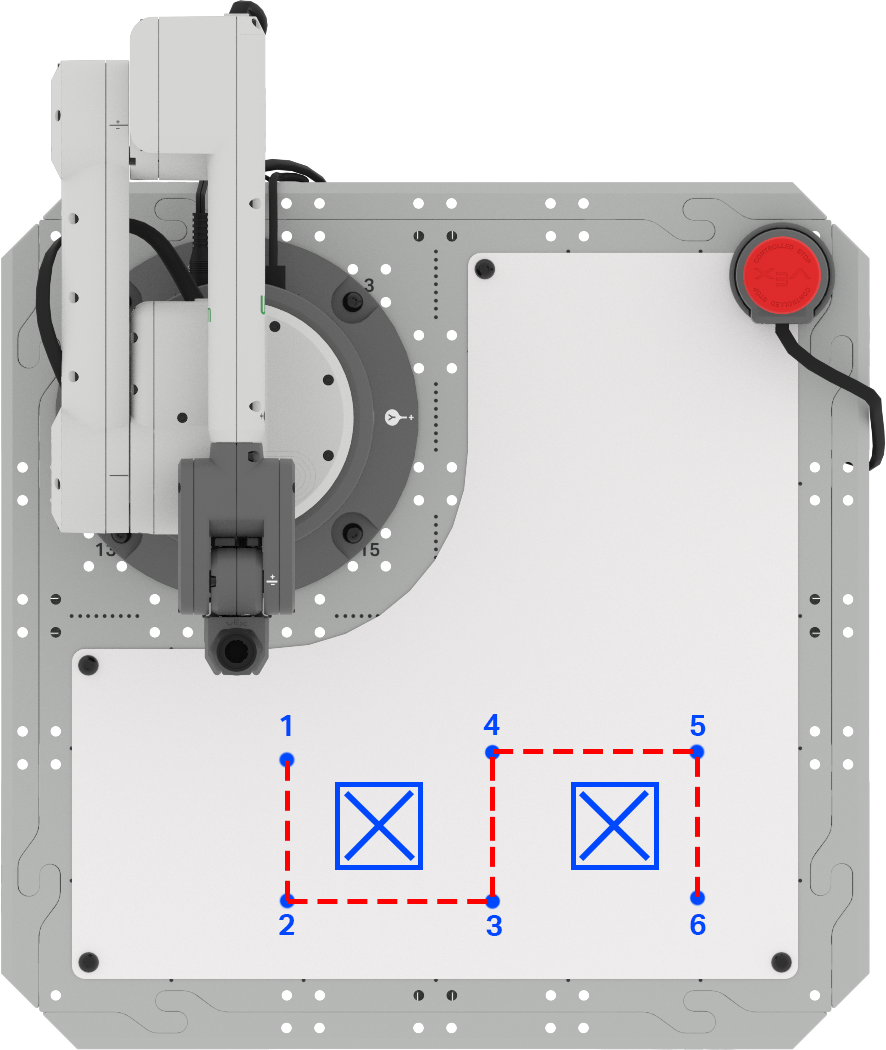
Étiquetez chaque point de cheminement nécessaire sur votre tableau blanc. Documentez ces points de cheminement dans votre cahier d'ingénierie.
À l'étape suivante, vous devrez déterminer les coordonnées (x, y, z) de chaque point de cheminement. Cela peut être fait en utilisant la formule de la leçon 2, ou vous pouvez utiliser la console de surveillance pour collecter chacune de ces coordonnées.
Pour votre information
Lors de l'utilisation de la formule pour calculer les coordonnées inconnues d'un point de cheminement, la direction dans laquelle le bras à 6 axes doit se déplacer le long d'un axe est importante. Si le bras à 6 axes se déplace dans la direction positive x ou y, la valeur de ∆x ou ∆y sera positive. Si le bras à 6 axes se déplace dans la direction négative x ou y, la valeur de ∆x ou ∆y sera négative.
Par exemple, lorsque vous vous déplacez du point de cheminement 3 au point de cheminement
4, le bras à 6 axes se déplacera le long de l'axe des x dans la direction négative.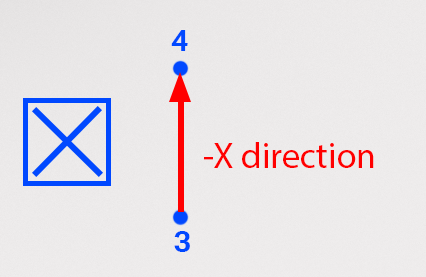
Lors de l'utilisation de la formule, la valeur de ∆x sera négative. Dans cet
exemple, la coordonnée x du point 3 est de 195 mm et la distance entre les points 3 et 4
a été mesurée à 105 mm. À l'aide de la formule, nous pouvons calculer que la coordonnée
x du point 4 est de 90 mm, comme indiqué ici. 

Vous avez déjà utilisé la console de moniteur dans l'unité 3.
Pour ouvrir la console de moniteur dans VEXcode EXP, sélectionnez l'icône Moniteur. Assurez-vous que votre bras à 6 axes est connecté à VEXcode EXP.

Déplacez manuellement l'extrémité du bras à 6 axes à chaque point de cheminement et enregistrez les coordonnées (x, y, z) correspondantes dans votre cahier d'ingénierie.

Maintenant que vous avez vos coordonnées pour chaque point de cheminement, vous devez modifier le projet VEXcode à partir de la leçon 2.
Ouvrez votre projet dans VEXcode EXP. Ce projet doit inclure les blocs suivants, mais peut avoir des valeurs de coordonnées différentes.

Entrez les coordonnées des points de cheminement 1, 2 et 3 dans les trois Déplacer pour positionner les blocs dans l'ordre. Assurez-vous d'utiliser vos coordonnées.
Remarque : Vous pouvez modifier les blocs Comment pour qu'ils correspondent au projet, en sélectionnant l'espace et en tapant.

Regardez les blocs dans le projet. Que pensez-vous que le bras à 6 axes fera lorsque le projet sera exécuté ? Documentez votre prévision dans votre cahier d'ingénierie.

Assurez-vous que le bras à 6 axes est connecté à VEXcode. Exécutez votre projet.
Observez le comportement du bras à 6 axes. Est-ce qu'il bouge comme vous l'aviez prédit ?
Arrêtez le projet une fois que le bras à 6 axes a fini de bouger.
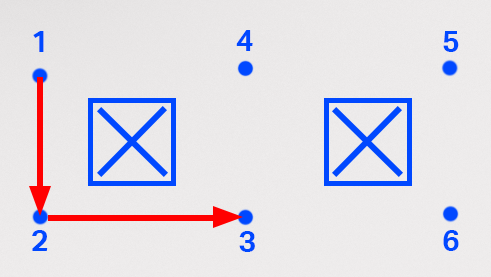
Le bras à 6 axes doit passer du point de cheminement 1 au point de cheminement 2 et se terminer au point de cheminement 3. Si ce n'est pas le cas, revenez en arrière et vérifiez les coordonnées que vous avez mises dans le projet. Assurez-vous que les paramètres x, y et z correspondent aux coordonnées que vous avez recueillies dans votre cahier d'ingénierie. Exécutez à nouveau le projet pour le tester.
Une fois que vous avez réussi à naviguer jusqu'au point de cheminement 3, passez à l'étape suivante.

Ajoutez trois blocs Déplacer pour positionner à la pile, de sorte que vous avez un total de six – un pour chaque point de cheminement, ainsi que votre emplacement de départ et d'arrivée.
Pour votre information
Vous pouvez également ajouter des blocs en dupliquant ce qui se trouve déjà dans une pile. Pour dupliquer, ouvrez le menu contextuel en cliquant avec le bouton droit de la souris sur le bloc que vous souhaitez dupliquer. Lors de la duplication, chaque bloc sous celui que vous sélectionnez sera dupliqué.
Dans ce projet, vous pouvez sélectionner le premier bloc Déplacer vers la position afin de dupliquer les trois pour un total de six. Une fois que « Dupliquer » a été sélectionné, les blocs seront copiés (y compris leurs paramètres) et vous pouvez les ajouter au bas de la pile.
Dans cette vidéo, les blocs de commentaires et les blocs de déplacement vers la position sont dupliqués. Vous pouvez modifier les blocs de commentaires dans votre projet pour l'aider à rester organisé.

Entrez les coordonnées des trois derniers points de cheminement dans les trois derniers blocs Move to position. Assurez-vous de saisir les coordonnées de votre cahier d'ingénierie dans l'ordre, en terminant par l'emplacement final.
Notez que vos coordonnées différeront de celles indiquées ici car elles sont basées sur l'emplacement exact de vos obstacles et les coordonnées que vous avez recueillies.

Assurez-vous que le bras à 6 axes est connecté à VEXcode. Exécutez votre projet.
Observez le comportement du bras à 6 axes. Est-ce qu'il bouge comme vous l'aviez prédit ?
Arrêtez le projet une fois que le bras à 6 axes a terminé ses mouvements.
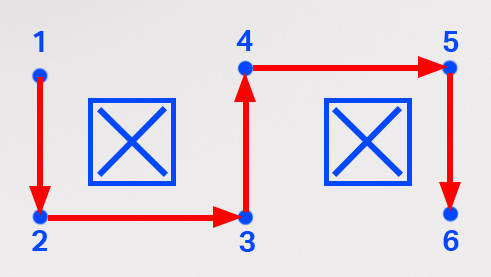
Le bras à 6 axes doit se déplacer du point de cheminement 1, en passant par les points de cheminement 2 à 5, et se terminer au point de cheminement 6. Si ce n'est pas le cas, revenez en arrière et vérifiez les coordonnées que vous avez mises dans le projet. Assurez-vous que les paramètres x, y et z correspondent aux coordonnées que vous avez recueillies dans votre cahier d'ingénierie. Exécutez à nouveau le projet pour le tester.
Une fois que vous avez réussi à naviguer jusqu'au point de cheminement 6, passez à l'étape suivante.

Renommez et enregistrez le projet sur votre appareil.
Activité
Maintenant que vous avez appris à trouver plusieurs points de cheminement et à coder le bras à 6 axes pour naviguer sur un chemin, vous allez pratiquer cette compétence dans l'activité. Dans cette activité, vous allez coder le bras à 6 axes pour qu'il se déplace le long du chemin désigné afin d'éviter les obstacles.
- Configuration :
- Dessinez trois emplacements « à garder à l'écart » sur la tuile comme indiqué dans cette image.
- Étiquetez vos emplacements de départ et d'arrivée A et B comme indiqué.

Activité :
- Codez le bras à 6 axes pour qu'il se déplace du point A au point B le long du chemin comme indiqué ci-dessus.
- Enregistrez votre processus de recherche de points de cheminement dans votre carnet d'ingénierie.
- Après avoir construit et testé votre projet, exécutez-le pour vous assurer qu'il fonctionne comme prévu.
- Une fois l'activité terminée, renommez et enregistrez votre projet sur votre appareil.
Vérifiez votre compréhension
Avant de passer à la leçon suivante, assurez-vous de comprendre les concepts de cette leçon en répondant aux questions du document ci-dessous dans votre cahier d'ingénierie.
Vérifiez votre compréhension des questions > (Google Doc / .docx / .pdf)
Sélectionnez Suivant > pour appliquer vos compétences dans l'activité Tout mettre ensemble.