
Nella lezione 2, hai imparato come trovare un waypoint per codificare un percorso controllato per il braccio robotico a 6 assi per evitare un ostacolo. In questa lezione, ti eserciterai a trovare i waypoint per evitare molteplici ostacoli. Alla fine di questa lezione, utilizzerai i waypoint che hai trovato per codificare il braccio a 6 assi per muoverti e tracciare un percorso tra gli ostacoli.

Waypoint multipli
In molte situazioni e contesti industriali, i bracci robotici dovranno spostarsi e aggirare molteplici ostacoli. Puoi utilizzare strategie che hai imparato in precedenza per trovare questi waypoint. Per esercitarti, segui questi passaggi.

Inizia impostando il tuo spazio con due aree "tenere fuori" contrassegnate sull'allegato della lavagna con un pennarello per lavagna. Questi dovrebbero avere all'incirca le dimensioni di un cubo.
Disegna questo layout nel tuo quaderno di ingegneria.

Il braccio a 6 assi dovrà tracciare una linea per seguire il percorso fornito qui. Documenta il percorso nel tuo quaderno di ingegneria.
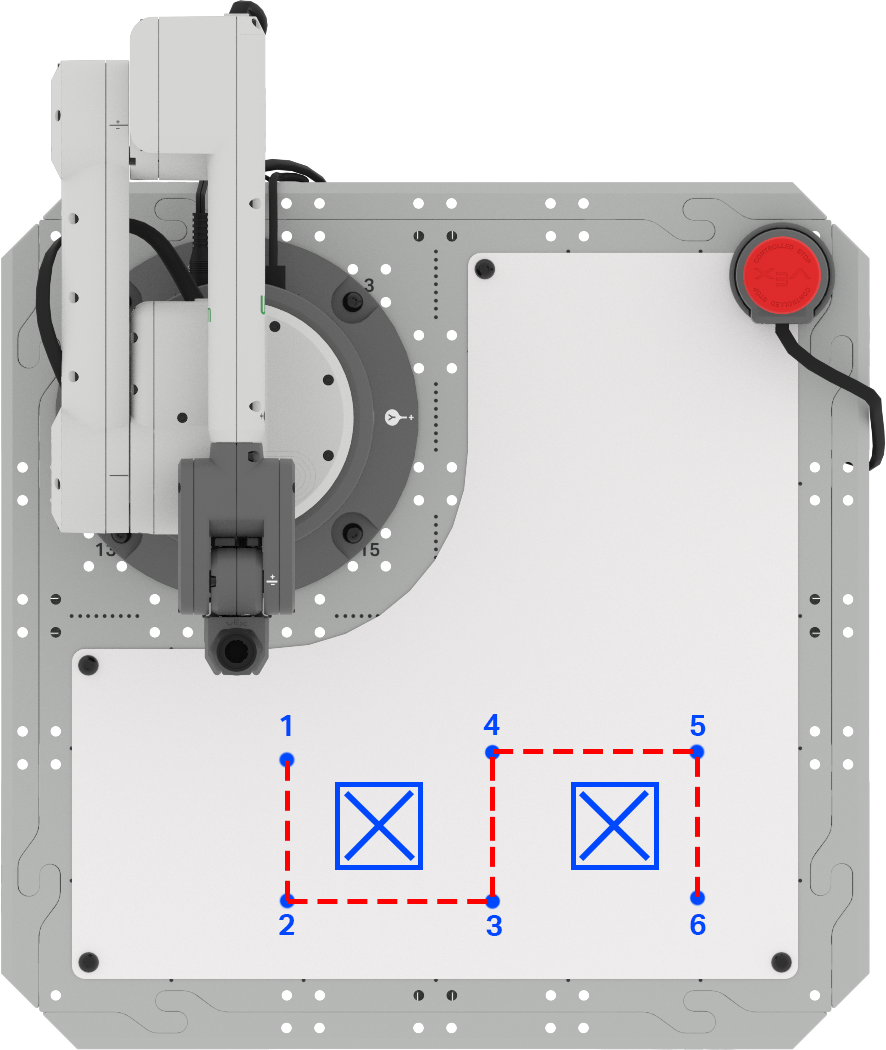
Etichettare ogni waypoint necessario sulla lavagna. Documenta questi waypoint nel tuo quaderno di ingegneria.
Nel passaggio successivo, dovrai determinare le coordinate (x, y, z) di ciascun waypoint. Questo può essere fatto utilizzando la formula della Lezione 2, oppure è possibile utilizzare la Console Monitor per raccogliere ciascuna di queste coordinate.
Per tua informazione
Quando si utilizza la formula per calcolare le coordinate sconosciute di un waypoint, la direzione in cui il braccio a 6 assi deve viaggiare lungo un asse è importante. Se il braccio a 6 assi si muoverà nella direzione positiva x o y, il valore di ∆x o ∆y sarà positivo. Se il braccio a 6 assi si muoverà nella direzione negativa x o y, il valore di ∆x o ∆y sarà negativo.
Ad esempio, quando ci si sposta dal waypoint 3 al waypoint 4, il braccio a 6 assi si
muoverà lungo l'asse x in direzione negativa.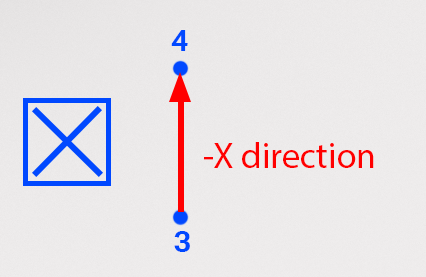
Quando si utilizza la formula, il valore di ∆x sarà negativo. In questo esempio, la
coordinata x del punto 3 è 195 mm e la distanza tra i punti 3 e 4 è stata misurata in
105 mm. Usando la formula, possiamo calcolare che la coordinata x del punto 4 sia 90 mm,
come mostrato qui. 

In precedenza hai utilizzato la console del monitor nell'unità 3.
Per aprire la Monitor Console in VEXcode EXP, selezionare l'icona Monitor. Assicurarsi che il braccio a 6 assi sia collegato a VEXcode EXP.

Spostare manualmente l'estremità del braccio a 6 assi su ciascun waypoint e registrare le coordinate corrispondenti (x, y, z) nel quaderno di ingegneria.

Ora che hai le tue coordinate per ogni waypoint, devi modificare il progetto VEXcode dalla Lezione 2.
Apri il tuo progetto in VEXcode EXP. Questo progetto dovrebbe includere i seguenti blocchi, ma potrebbe avere valori di coordinate diversi.

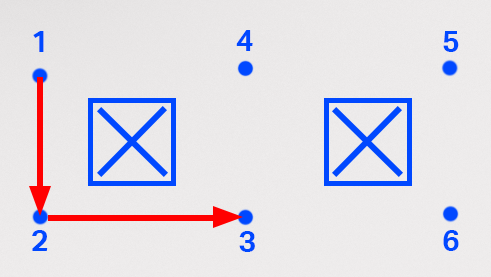
Inserire le coordinate dei waypoint 1, 2 e 3 nei tre blocchi Move to position in order. Assicurati di utilizzare le tue coordinate.
Nota: è possibile modificare i blocchi di Commento in modo che corrispondano al progetto, selezionando lo spazio e digitando.

Guarda i blocchi nel progetto. Cosa pensi che farà il braccio a 6 assi quando il progetto sarà in esecuzione? Documenta la tua previsione nel tuo quaderno di ingegneria.

Assicurarsi che il braccio a 6 assi sia collegato a VEXcode. Esegui il tuo progetto.
Osservare il comportamento del braccio a 6 assi. Si muove come avevi previsto?
Arrestare il progetto una volta che il braccio a 6 assi ha finito di muoversi.
Il braccio a 6 assi deve spostarsi dal waypoint 1, al waypoint 2 e terminare al waypoint 3. In caso contrario, torna indietro e controlla le coordinate che hai inserito nel progetto. Assicurati che i parametri x, y e z corrispondano alle coordinate che hai raccolto nel tuo quaderno di ingegneria. Eseguire nuovamente il progetto per testarlo.
Una volta che hai navigato con successo al waypoint 3, passa al passaggio successivo.

Aggiungi tre Sposta per posizionare i blocchi alla pila, in modo da avere un totale di sei – uno per ogni waypoint, così come la tua posizione iniziale e finale.
Per tua informazione
Puoi anche aggiungere blocchi duplicando ciò che è già in una pila. Per duplicare, apri il menu contestuale facendo clic con il pulsante destro del mouse sul blocco che desideri duplicare. Durante la duplicazione, ogni blocco al di sotto di quello selezionato verrà duplicato.
In questo progetto è possibile selezionare il primo blocco Move to position in modo da duplicare tutti e tre per un totale di sei. Una volta selezionato "Duplica", i blocchi verranno copiati (compresi i loro parametri) e potrai aggiungerli in fondo alla pila.
In questo video, i blocchi Comment e Move to position vengono duplicati. Puoi modificare i blocchi Commento nel tuo progetto per mantenerlo organizzato.

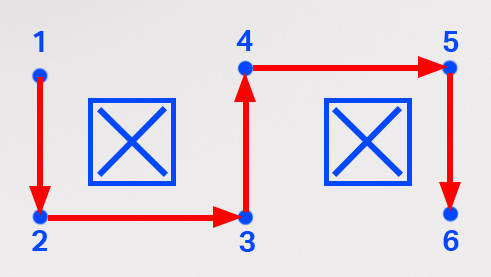
Inserisci le coordinate per gli ultimi tre waypoint negli ultimi tre blocchi Sposta in posizione. Assicurati di inserire le coordinate dal tuo quaderno di ingegneria in ordine, terminando con la posizione finale.
Tieni presente che le tue coordinate varieranno da quelle mostrate qui perché si basano sulla posizione esatta degli ostacoli e sulle coordinate che hai raccolto.

Assicurarsi che il braccio a 6 assi sia collegato a VEXcode. Esegui il tuo progetto.
Osservare il comportamento del braccio a 6 assi. Si muove come avevi previsto?
Arrestare il progetto una volta che il Braccio a 6 Assi ha completato i suoi movimenti.
Il braccio a 6 assi deve spostarsi dal waypoint 1, attraverso i waypoint da 2 a 5 e terminare al waypoint 6. In caso contrario, torna indietro e controlla le coordinate che hai inserito nel progetto. Assicurati che i parametri x, y e z corrispondano alle coordinate che hai raccolto nel tuo quaderno di ingegneria. Eseguire nuovamente il progetto per testarlo.
Una volta che hai navigato con successo al waypoint 6, passa al passaggio successivo.

Rinomina e salva il progetto sul tuo dispositivo.
Attività
Ora che hai imparato come trovare più waypoint e codificare il braccio a 6 assi per navigare in un percorso, praticherai questa abilità nell'attività. In questa attività, codificherai il braccio a 6 assi per muoverti lungo il percorso designato per evitare gli ostacoli.
- Configurazione:
- Disegna tre posizioni "keep out" sulla tessera come mostrato in questa immagine.
- Etichettare le posizioni di inizio e fine A e B come mostrato.

Attività:
- Codificare il Braccio a 6 Assi per spostarsi dal punto A al punto B lungo il percorso come mostrato sopra.
- Registra il tuo processo per trovare i waypoint nel tuo quaderno di ingegneria.
- Dopo aver costruito e testato il tuo progetto, eseguilo per assicurarti che funzioni come previsto.
- Una volta completata l'attività, rinomina e salva il tuo progetto sul tuo dispositivo.
Verifica la tua comprensione
Prima di passare alla lezione successiva, assicurati di comprendere i concetti di questa lezione rispondendo alle domande nel documento seguente nel tuo quaderno di ingegneria.
Domande sulla comprensione > (Google Doc / .docx / .pdf)
Seleziona Avanti > per applicare le tue abilità nell'attività Mettere tutto insieme.