
Pelajaran 3: Beberapa Titik Jalan
Dalam Pelajaran 2, Anda mempelajari cara menemukan titik arah untuk membuat kode jalur terkendali bagi Lengan Robot 6-Sumbu untuk menghindari rintangan. Dalam Pelajaran ini, Anda akan berlatih menemukan titik arah untuk menghindari berbagai rintangan. Di akhir Pelajaran ini, Anda akan menggunakan titik arah yang Anda temukan untuk mengkodekan Lengan 6-Sumbu untuk bergerak dan menggambar jalur di antara rintangan.

Beberapa Titik Jalan
Dalam banyak situasi dan lingkungan industri, lengan robotik perlu bergerak dan menghindari berbagai rintangan. Anda dapat menggunakan strategi yang telah Anda pelajari sebelumnya untuk menemukan titik jalan ini. Untuk mempraktikkannya, ikuti langkah-langkah berikut.
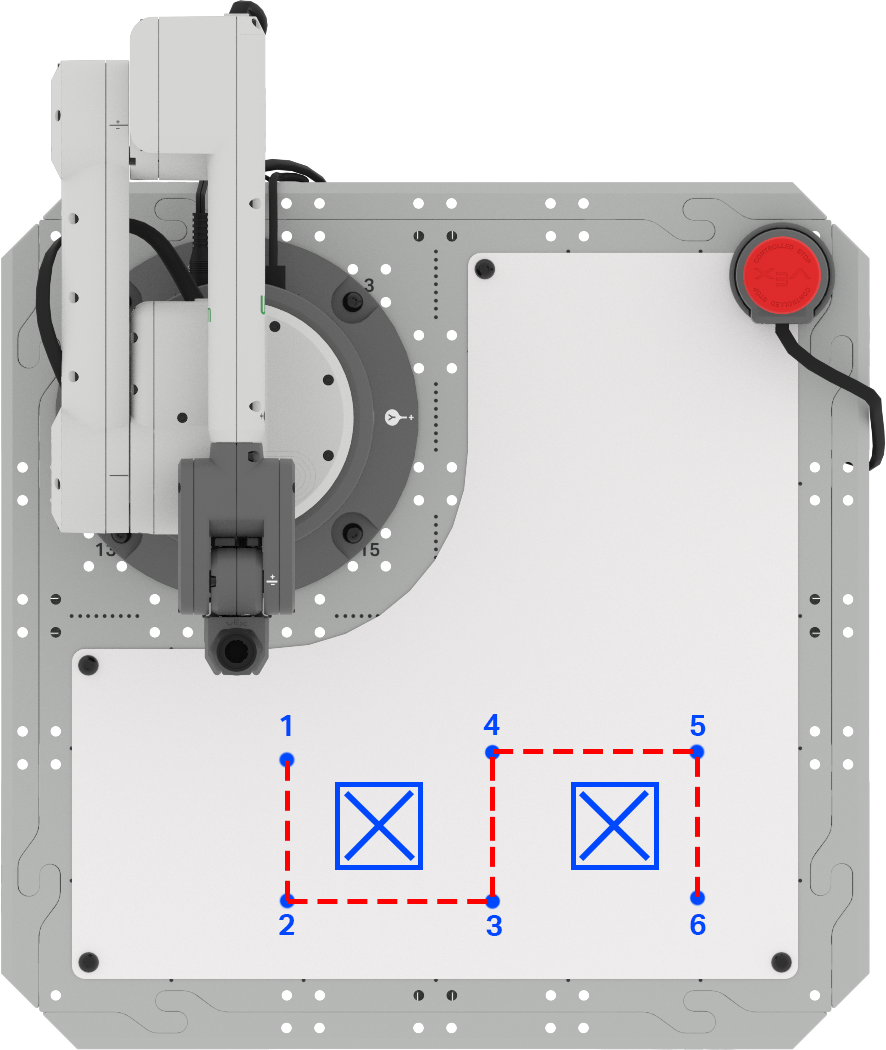
Mulailah dengan menyiapkan ruang Anda dengan dua area "dilarang masuk" yang ditandai pada Lampiran Papan Tulis dengan spidol papan tulis. Ukurannya kira-kira harus sebesar Kubus.
Buat sketsa tata letak ini di buku catatan teknik Anda.

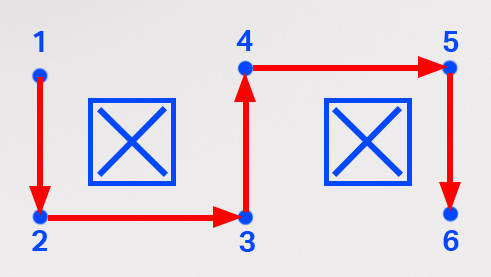
Lengan 6-Sumbu Anda perlu menggambar garis untuk mengikuti jalur yang disediakan di sini. Dokumentasikan jalur tersebut di buku catatan teknik Anda.

Beri label pada setiap titik jalan yang diperlukan pada Papan Tulis Anda. Dokumentasikan titik-titik jalan ini di buku catatan teknik Anda.
Pada langkah berikutnya, Anda perlu menentukan koordinat (x, y, z) setiap titik jalan. Ini dapat dilakukan dengan menggunakan rumus dari Pelajaran 2, atau Anda dapat menggunakan Monitor Console untuk mengumpulkan setiap koordinat ini.
Untuk Informasi Anda
Saat menggunakan rumus untuk menghitung koordinat titik arah yang tidak diketahui, arah yang harus ditempuh Lengan 6-Sumbu di sepanjang sumbu adalah penting. Jika Lengan 6-Sumbu akan bergerak dalam arah x atau y positif, nilai ∆x atau ∆y akan positif. Jika Lengan 6-Sumbu bergerak dalam arah x atau y negatif, nilai ∆x atau ∆y akan negatif.
Misalnya, saat bergerak dari titik arah 3 ke titik arah 4, Lengan 6-Sumbu akan bergerak sepanjang sumbu x dalam arah negatif.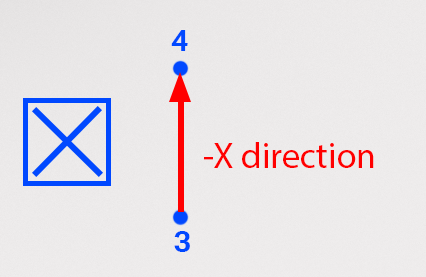
Saat menggunakan rumus, nilai ∆x akan negatif. Dalam contoh ini, koordinat x titik 3 adalah 195 mm, dan jarak antara titik 3 dan 4 diukur sebesar 105 mm. Dengan menggunakan rumus, kita dapat menghitung koordinat x titik 4 menjadi 90mm, seperti yang ditunjukkan di sini. 
Anda sebelumnya menggunakan Monitor Console di Unit 3.
Untuk membuka Monitor Console di VEXcode EXP, pilih ikon Monitor. Pastikan Lengan 6-Sumbu Anda terhubung ke VEXcode EXP.

Pindahkan ujung Lengan 6-Sumbu secara manual ke setiap titik arah dan catat koordinat (x, y, z) yang sesuai di buku catatan teknik Anda.

Sekarang setelah Anda memiliki koordinat untuk setiap titik jalan, Anda perlu mengedit proyek VEXcode dari Pelajaran 2.
Buka proyek Anda di VEXcode EXP. Proyek ini harus menyertakan blok berikut, tetapi mungkin memiliki nilai koordinat yang berbeda.

Masukkan koordinat titik arah 1, 2, dan 3 ke dalam tiga blok Pindah ke posisi secara berurutan. Pastikan untuk menggunakan koordinat Anda.
Catatan: Anda dapat mengedit blok Ckomentar agar sesuai dengan proyek, dengan memilih spasi dan mengetik.

Lihatlah blok-blok dalam proyek tersebut. Menurut Anda apa fungsi Lengan 6-Sumbu saat proyek dijalankan? Dokumentasikan prediksi Anda di buku catatan teknik Anda.

Pastikan Lengan 6-Sumbu terhubung ke VEXcode. Jalankan proyek Anda.
Amati perilaku Lengan 6-Sumbu. Apakah gerakannya sesuai dengan prediksi Anda?

Hentikan proyek setelah lengan 6-Sumbu selesai bergerak.
Lengan 6-Sumbu harus bergerak dari titik arah 1 ke titik arah 2 dan berakhir di titik arah 3. Jika tidak, kembali dan periksa koordinat yang Anda masukkan ke dalam proyek. Pastikan parameter x, y, dan z sesuai dengan koordinat yang Anda kumpulkan di buku catatan teknik Anda. Jalankan proyek lagi untuk mengujinya.
Setelah Anda berhasil menavigasi ke titik arah 3, lanjutkan ke langkah berikutnya.

Tambahkan tiga blok Pindahkan ke posisi ke tumpukan, sehingga Anda memiliki total enam – satu untuk setiap titik arah, serta lokasi awal dan akhir Anda.

Untuk Informasi Anda
Anda juga dapat menambahkan blok dengan menduplikasi apa yang sudah ada dalam tumpukan. Untuk menduplikasi, buka Menu Konteks dengan mengklik kanan pada blok yang ingin Anda duplikat. Saat menduplikasi, setiap blok di bawah blok yang Anda pilih akan diduplikasi.
Dalam proyek ini, Anda dapat memilih Pindahkan ke posisi blok pertama untuk menduplikasi ketiganya sehingga totalnya menjadi enam. Setelah 'Duplikat' dipilih, blok akan disalin (termasuk parameternya) dan Anda dapat menambahkannya ke bagian bawah tumpukan.
Dalam video ini, blok Komentar dan blok Pindah ke posisi diduplikasi dengan cara klik kanan untuk membuka menu konteks, lalu pilih opsi teratas, 'duplikat'. Blok yang diduplikasi ditempelkan di bagian bawah proyek. Anda dapat mengedit blok Komentar di proyek Anda untuk membantu menjaga proyek Anda tetap terorganisir.
Masukkan koordinat untuk tiga titik arah terakhir ke dalam tiga blok terakhir Pindah ke posisi. Pastikan untuk memasukkan koordinat dari buku catatan teknik Anda secara berurutan, diakhiri dengan lokasi akhir.
Perhatikan bahwa koordinat Anda akan bervariasi dari yang ditampilkan di sini karena koordinat tersebut didasarkan pada lokasi pasti rintangan dan koordinat yang Anda kumpulkan.

Pastikan Lengan 6-Sumbu terhubung ke VEXcode. Jalankan proyek Anda.
Amati perilaku Lengan 6-Sumbu. Apakah gerakannya sesuai dengan prediksi Anda?

Hentikan proyek setelah Lengan 6-Sumbu menyelesaikan pergerakannya.
Lengan 6-Sumbu harus bergerak dari titik arah 1, melalui titik arah 2 hingga 5, dan berakhir di titik arah 6. Jika tidak, kembali dan periksa koordinat yang Anda masukkan ke dalam proyek. Pastikan parameter x, y, dan z sesuai dengan koordinat yang Anda kumpulkan di buku catatan teknik Anda. Jalankan proyek lagi untuk mengujinya.
Setelah Anda berhasil menavigasi ke titik arah 6, lanjutkan ke langkah berikutnya.
Ganti nama dan simpan proyek ke perangkat Anda.

Aktivitas
Sekarang setelah Anda mempelajari cara menemukan beberapa titik arah dan membuat kode Lengan 6-Sumbu untuk menavigasi jalur, Anda akan melatih keterampilan ini dalam aktivitas. Dalam aktivitas ini, Anda akan mengkode Lengan 6-Sumbu untuk bergerak sepanjang jalur yang ditentukan untuk menghindari rintangan.
- Pengaturan:
- Gambarlah tiga lokasi 'dilarang masuk' pada Ubin seperti yang ditunjukkan pada gambar ini.
- Beri label lokasi awal dan akhir A dan B seperti yang ditunjukkan.

Aktivitas:
- Kodekan Lengan 6-Sumbu untuk bergerak dari titik A ke titik B sepanjang lintasan seperti yang ditunjukkan di atas.
- Catat proses Anda untuk menemukan titik arah di buku catatan teknik Anda.
- Setelah membangun dan menguji proyek Anda, jalankan untuk memastikan proyek berjalan sebagaimana mestinya.
- Setelah Anda menyelesaikan aktivitas, ganti nama dan simpan proyek Anda ke perangkat Anda.
Periksa Pemahaman Anda
Sebelum melanjutkan ke Pelajaran berikutnya, pastikan Anda memahami konsep dalam Pelajaran ini dengan menjawab pertanyaan dalam dokumen di bawah ini di buku catatan teknik Anda.
Pertanyaan Periksa Pemahaman Anda > (Google Doc / .docx / .pdf)
Pilih Berikutnya > untuk menerapkan keterampilan Anda dalam aktivitas Menyatukan Semuanya.