
Introduction
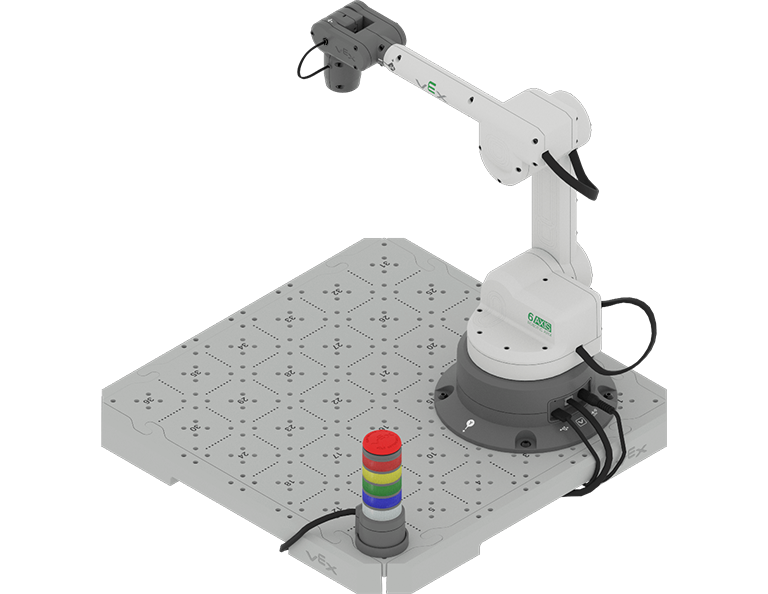
Dans ce cours, vous serez initié au monde des robots industriels avec le kit CTE Workcell. Vous en apprendrez davantage sur l’automatisation des usines et le rôle de la robotique industrielle au sein de celle-ci. Vous découvrirez le bras robotique à 6 axes CTE et comment le connecter à votre ordinateur, afin que vous puissiez commencer à explorer les mouvements manuels.
Regardez la vidéo d’introduction suivante pour avoir un aperçu de ce que vous apprendrez dans cette unité.
Configuration de votre cahier d'ingénierie
Tout au long de ce cours, vous utiliserez un cahier d’ingénierie pour documenter vos notes, votre apprentissage, vos projets et vos réflexions. Dans chaque unité, vous serez invité à enregistrer des informations, des objectifs d'apprentissage, des réponses aux questions de vérification de votre compréhension et plus encore dans votre cahier d'ingénierie. Il est important d'utiliser votre carnet de manière cohérente, afin de pouvoir le parcourir et utiliser les informations que vous avez enregistrées pour vous aider dans les activités du cours, les réflexions de clôture et pour poser et répondre à des questions liées à vos objectifs d' .
Regardez la vidéo ci-dessous pour en savoir plus sur la configuration de votre carnet d'ingénierie et la manière dont vous pouvez le personnaliser.
Votre carnet d'ingénierie numérique
Vous aurez besoin de votre propre cahier d'ingénierie, que vous enrichirez continuellement
tout au long du cours. Le cahier d'ingénierie numérique du CTE est disponible sous forme de
diapositives Google ou de Microsoft PowerPoint. Si vous utilisez la version Google
Slides, vous devrez en faire une copie lors de l'ouverture du lien.
Sélectionnez Faire une copie lorsque vous y êtes invité, comme
indiqué ici.
- Faites une copie modèle de cahier d'ingénierie numérique du CTE. Ce sera votre cahier d'ingénierie pour tout le cours. Sélectionnez soit le lien Google Slides, soit le lien Microsoft PowerPoint ci-dessous.
- Faites une copie des parties numériques du CTE. Ce diaporama vous donnera des images que vous pourrez utiliser pour créer des pages personnalisées dans votre cahier d'ingénierie numérique pour répondre à vos besoins tout au long du cours. Sélectionnez le lien Google Slides OU le lien Microsoft PowerPoint ci-dessous.
- Faites une copie instructions d'utilisation du cahier d'ingénierie numérique CTE. Ce diaporama vous donnera des informations utiles pour utiliser votre cahier, ainsi que des trucs et astuces pour tirer le meilleur parti de votre cahier d'ingénierie numérique tout au long du cours. Sélectionnez soit le lien Google Slides, soit le lien Microsoft PowerPoint ci-dessous.
- Ajoutez votre nom aux noms de fichier de chacun des fichiers CTE Digital Engineering Notebook que vous venez de télécharger. Assurez-vous de pouvoir accéder facilement à votre cahier numérique sur votre appareil, car vous utiliserez le même cahier d'ingénierie pendant tout le cours.
Co-créer des objectifs d'apprentissage
Maintenant que vous avez regardé la vidéo et que vous savez que vous allez en apprendre davantage sur l'automatisation industrielle et la robotique industrielle, vous commencerez par en apprendre davantage sur le bras robotique à 6 axes et comment le connecter à votre appareil. Vous découvrirez également le système de coordonnées du bras à 6 axes et comment collecter des coordonnées à l’aide de mouvements manuels. À la fin de cette unité, vous serez en mesure de collecter les coordonnées d’emplacements spécifiques sur la tuile CTE avec le bras à 6 axes. Il est temps de réfléchir à ce que vous devrez apprendre et savoir pour accomplir ces .
Vous co-créerez des objectifs d'apprentissage avec votre groupe et votre enseignant pour capturer ces objectifs, afin que vous ayez une compréhension commune de vos objectifs d'apprentissage pour l'unité. Vous écrirez vos objectifs d'apprentissage dans votre cahier d'ingénierie afin de pouvoir vous y référer tout au long de l' .
Il est utile de formuler les objectifs d'apprentissage sous la forme de « Je peux » affirmations. Des exemples d’objectifs d’apprentissage pour cette unité pourraient inclure :
- Je peux identifier les 6 axes sur le bras 6 axes.
- Je peux connecter le bras 6 axes à mon ordinateur.
- Je peux décrire comment le bras à 6 axes se déplace le long de l'axe x.
- Je peux enregistrer les coordonnées x, y et z d’un emplacement dans mon carnet d’ingénierie.
Pour créer vos objectifs d'apprentissage, réfléchissez d'abord à ce que vous devrez savoir pour pouvoir réaliser les activités présentées dans la vidéo ci-dessus. Faites une liste dans votre carnet d'ingénierie de ce que vous devrez savoir, apprendre et faire, comme ceci :
- Identifiez les 6 axes sur le bras 6 axes.
- Connectez le bras 6 axes à votre appareil.
- Décrivez le mouvement du bras à 6 axes le long des axes x, y et z.
- Rassemblez les coordonnées , y et z à l'aide du pendentif d'enseignement.
- Utilisez mon cahier d’ingénierie pour enregistrer les coordonnées x, y et z d’une position spécifique.
- Organiser le travail de notre groupe afin que nous réalisions l’activité de manière collaborative.
Ensuite, co-créez des objectifs d'apprentissage en fonction de votre liste. Réfléchissez à la manière dont chacune des choses que vous avez répertoriées peut être intégrée dans un objectif d'apprentissage, en utilisant des déclarations du type « Je peux ». Vous pouvez utiliser ce modèle pour vous aider à écrire vos objectifs d’apprentissage dans votre cahier d’ingénierie. (Google Doc / .docx / .pdf)
Par exemple, l'élément de liste « Identifier les 6 axes sur le bras à 6 axes » peut être décalé vers la cible d'apprentissage de «Je peux identifier les 6 axes sur le bras à 6 axes ».
Le tableau suivant montre un exemple de la manière dont l'organisateur d'objectifs d'apprentissage de votre cahier d'ingénierie pourrait être rempli.
| Catégorie d'objectif d'apprentissage | Objectifs d'apprentissage |
|---|---|
|
Objectifs de connaissances Que dois-je savoir et comprendre pour réussir l’unité ? |
|
|
Objectifs de raisonnement Que puis-je faire avec ce que je sais et comprends pour réussir dans l’Unité ? |
|
|
Objectifs de compétences Que puis-je démontrer pour montrer que je comprends les concepts et les compétences nécessaires pour réussir l'unité ? |
|
Partagez vos objectifs d’apprentissage avec votre enseignant. Ajustez-les selon vos besoins afin que vous, votre groupe et votre enseignant soyez tous d’accord.
Vocabulaire
Dans cette unité, vous serez initié aux concepts de la robotique industrielle, en utilisant des éléments du kit CTE Workcell et de VEXcode EXP. Cette liste de vocabulaire est là pour fournir une référence pour tous les nouveaux termes que vous pourriez rencontrer. Enregistrez ce vocabulaire dans votre cahier d'ingénierie. Utilisez cette liste comme référence lorsque vous travaillez sur l’unité et rencontrez des mots que vous ne connaissez peut-être pas.
- Bras robotisé à 6 axes
- Un type de robot industriel avec six points de rotation ou de mouvement, offrant une large gamme de mouvements et de flexibilité dans les tâches.
- Système de coordonnées cartésiennes
- Un système basé sur une grille utilisé pour localiser des emplacements dans l'espace à l'aide de coordonnées (x, y, z) pour décrire les positions précises de points ou d'objets.
- Automatisation industrielle
- L'automatisation industrielle est l'utilisation de la technologie et des machines pour rationaliser et améliorer les processus de fabrication et de production dans les usines, garantissant ainsi l'efficacité, la cohérence et la sécurité.
- Robots industriels
- Machines automatisées capables d’effectuer des tâches dans divers environnements industriels, souvent avec plus de précision et d’endurance que les travailleurs humains.
- Mouvement manuel
- Le processus de déplacement physique du bras à 6 axes pour collecter des données de coordonnées ou effectuer des tâches spécifiques sans programmation automatique.
- Origine
- L'emplacement à partir duquel toutes les valeurs de coordonnées cartésiennes commencent, (0,0,0).
- Pendentif d'enseignement
- Un appareil utilisé pour contrôler manuellement les actions d'un bras robotisé.
- Point central de l'outil (TCP)
- Le point à l'extrémité d'un bras de robot ou d'un outil utilisé comme référence pour les mouvements et les coordonnées.
- Cellule de travail
- Un agencement efficace d’équipements et de machines conçu pour optimiser les processus de production.
- Code VEX EXP
- Le logiciel utilisé pour le codage et le contrôle du bras à 6 axes.
| Quantité | Matériel nécessaire |
|---|---|
| 1 par groupe |
Kit de cellule de travail VEX CTE |
| 1 par groupe |
Ordinateur |
| 1 par groupe |
Code VEX EXP |
| 1 par élève |
Cahier d'ingénierie |
Sélectionnez Suivant > à pour en savoir plus sur la robotique industrielle.