
Previously in this Unit, you have learned the following:
- How robotic arms are used in manufacturing contexts.
- How to get started with VEXcode EXP.
- How the Cartesian coordinate system is used with the 6-Axis Robotic Arm.
- How to gather (x, y, z) coordinates of Tile locations using the Teach Pendant.
You will complete one additional activity in this Unit with the 6-Axis Arm putting all of these skills together.
Putting It All Together Activity
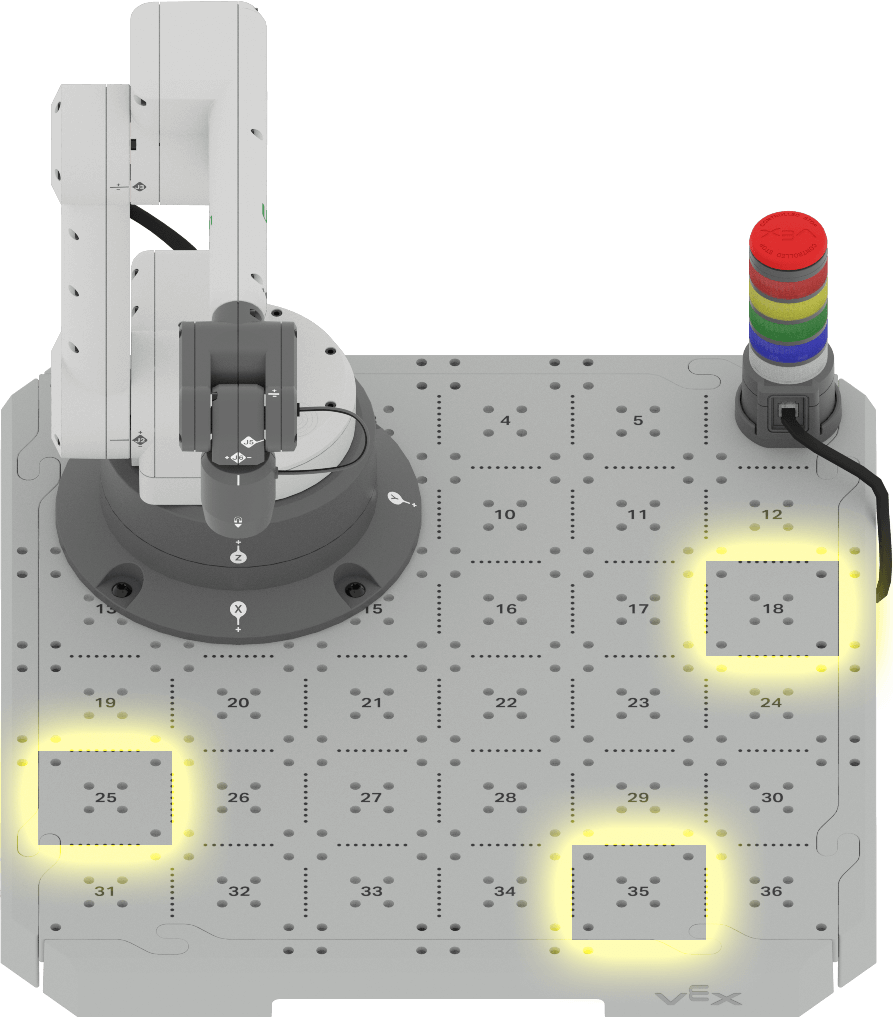
- Estimate the (x, y, z) coordinates of the following Tile locations. Assume that the 6-Axis Arm is touching each Tile location and the z-coordinate is 0 mm.
- Tile location 18
- Tile location 25
- Tile location 35
- Record these coordinate estimates in your engineering notebook. Explain how you determined each estimate.
- Manually move the 6-Axis Arm and record the (x, y, z) coordinates of the same Tile locations from Step 1 in your engineering notebook. Ensure the 6-Axis Arm is connected and manual movement is enabled before moving the 6-Axis Arm to each location.
- Compare your gathered coordinates to your estimates in your engineering notebook. How close were your estimates?
Wrap Up Reflection
Now that you have used the Teach Pendant to gather (x, y, z) coordinates of multiple Tile locations, it is time to reflect on what you have learned and done in this Unit.
Rate yourself as a novice, apprentice, or expert on each of the following concepts in your engineering notebook. Provide a brief explanation for why you gave yourself that rating for each concept:
- Identifying what industrial robots are and where they can be found in everyday life.
- Connecting the 6-Axis Arm to a device with VEXcode EXP.
- Estimating (x, y, z) coordinates of Tile locations based on the distance from the origin to the TCP of the 6-Axis Arm.
- Gathering (x, y, z) coordinates using manual movements.
Use this table to help you determine which category you fall under.
| Expert | I feel that I fully understood the concept and could teach this to someone else. |
| Apprentice | I feel that I understood the concept enough to complete the activity. |
| Novice | I feel that I did not understand the concept and do not know how to complete the activity. |
Then, reflect on the learning targets you co-created with your teacher for this Unit. Have you learned what you set out to learn? Why or why not? What were you most successful with? Why? How do you think you can build on your progress moving forward?
Each person in your group should complete their self-reflections in their engineering notebooks. Once everyone in your group has completed their self-reflections, check-in with your teacher and let them know you are ready for your debrief conversation.
Debrief Conversation
Now that you have completed the activities of the Unit, it is time to reflect on your learning and progress throughout the Unit. During this conversation, you and your teacher will discuss your progress towards the learning targets you co-created at the start of the Unit, as well as your self-assessment on the Debrief Conversation Rubric below, and your experience working collaboratively with your group. You will use evidence from your notes and reflections in your engineering notebook to support your ratings and answer questions during the discussion.
Using your reflections and notes in your engineering notebook, rate yourself on the Debrief Conversation Rubric linked here (Google Doc / .docx / .pdf). For each of the topics, rate yourself as Expert, Apprentice, or Novice.
Ask your instructor if you need any clarification on what is expected of you during this self-assessment.

Select < Return to Units to go back to all Units.