
Introduzione
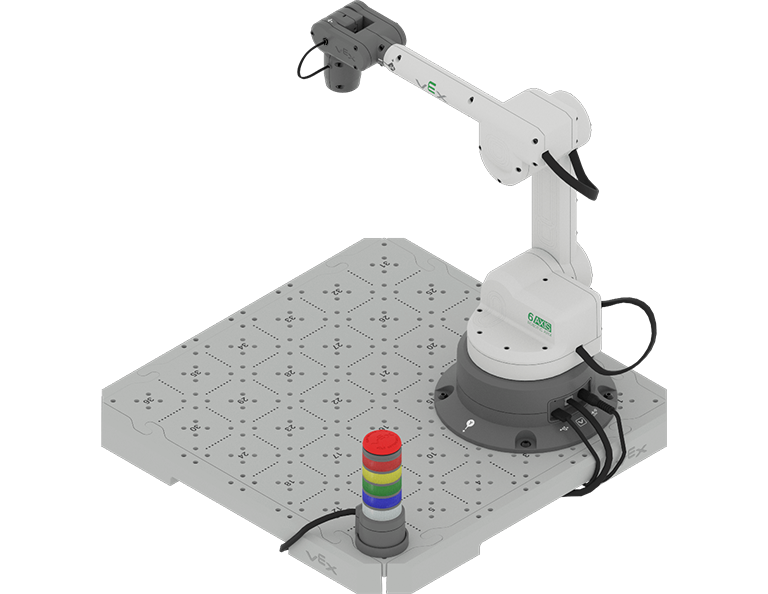
In questo corso verrai introdotto al mondo dei robot industriali con il kit CTE Workcell. Imparerai a conoscere l'automazione di fabbrica e il ruolo della robotica industriale al suo interno. Ti verrà presentato il braccio robotico a 6 assi CTE e ti verrà spiegato come collegarlo al computer, così potrai iniziare a esplorare i movimenti manuali.
Guarda il seguente video introduttivo per una panoramica di ciò che apprenderai in questa Unità.
Impostazione del tuo quaderno di ingegneria
Durante questo corso utilizzerai un quaderno di ingegneria per documentare i tuoi appunti, l'apprendimento, i progetti e le riflessioni. In ogni Unità ti verrà chiesto di registrare informazioni, obiettivi di apprendimento, risposte alle domande di Verifica della comprensione e altro ancora nel tuo quaderno di ingegneria. È importante utilizzare il tuo quaderno in modo coerente, in modo da poterlo consultare e utilizzare le informazioni registrate per aiutarti con le attività del corso, le riflessioni conclusive e per porre e rispondere a domande relative ai obiettivi di apprendimento.
Guarda il video qui sotto per scoprire come impostare il tuo notebook di ingegneria e come puoi renderlo unico per te.
Il tuo quaderno di ingegneria digitale
Avrai bisogno di un tuo quaderno di appunti di ingegneria, che arricchirai costantemente
durante il corso. Il CTE Digital Engineering Notebook è disponibile come Google Slides o
Microsoft PowerPoint. Se utilizzi la versione Google Slides, ti verrà richiesto di
crearne una copia quando apri il collegamento. Selezionare Crea una
copia quando richiesto, come mostrato qui.
- Crea una copia del del quaderno di ingegneria digitale CTE. Questo sarà il tuo quaderno di ingegneria per l'intero corso. Selezionare il collegamento Google Slides OPPURE il collegamento Microsoft PowerPoint qui sotto.
- Crea una copia delle parti CTE digitali. Questa presentazione ti fornirà immagini che potrai utilizzare per creare pagine personalizzate nel tuo quaderno di ingegneria digitale in base alle tue esigenze durante il corso. Selezionare il collegamento Google Slides OPPURE il collegamento Microsoft PowerPoint qui sotto.
- Fare una copia delle istruzioni su come utilizzare il CTE Digital Engineering Notebook. Questa presentazione ti fornirà informazioni utili per utilizzare il tuo notebook, nonché suggerimenti e trucchi per sfruttare al meglio il tuo notebook di ingegneria digitale durante il corso. Selezionare il collegamento Google Slides OPPURE il collegamento Microsoft PowerPoint qui sotto.
- Aggiungi il tuo nome al nome di ciascuno dei file del CTE Digital Engineering Notebook appena scaricati. Assicurati di poter accedere facilmente al tuo quaderno digitale sul tuo dispositivo, poiché utilizzerai lo stesso quaderno di ingegneria per l'intero corso.
Co-creare obiettivi di apprendimento
Ora che hai guardato il video e sai che imparerai l'automazione di fabbrica e la robotica industriale, inizierai imparando a conoscere il braccio robotico a 6 assi e come collegarlo al tuo dispositivo. Imparerai anche a conoscere il sistema di coordinate del braccio a 6 assi e come raccogliere le coordinate utilizzando movimenti manuali. Al termine di questa unità, sarai in grado di raccogliere le coordinate di posizioni specifiche sul CTE Tile con il braccio a 6 assi. È tempo di pensare a cosa dovrai imparare e sapere per portare a termine questi .
Insieme al tuo gruppo e al tuo insegnante creerai obiettivi di apprendimento per definire questi obiettivi, in modo da avere una comprensione condivisa dei tuoi obiettivi di apprendimento per l'Unità. Scriverai i tuoi obiettivi di apprendimento nel tuo quaderno di ingegneria in modo da poterli consultare durante l' .
È utile formulare gli obiettivi di apprendimento sotto forma di affermazioni del tipo "Io posso" . Esempi di obiettivi di apprendimento per questa Unità potrebbero includere:
- Riesco a identificare i 6 assi del braccio a 6 assi.
- Posso collegare il braccio a 6 assi al mio computer.
- Posso descrivere come il braccio a 6 assi si muove lungo l'asse x.
- Posso registrare le coordinate x, y e z di un luogo nel mio quaderno di ingegneria.
Per creare i tuoi obiettivi di apprendimento, fai prima un brainstorming su ciò che dovrai sapere per poter completare le attività mostrate nel video sopra. Fai un elenco nel tuo quaderno di ingegneria di ciò che dovrai sapere, imparare e fare, in questo modo:
- Identificare i 6 assi sul braccio a 6 assi.
- Collega il braccio a 6 assi al tuo dispositivo.
- Descrivere il movimento del braccio a 6 assi lungo gli assi x, y e z.
- Raccogli coordinate x, y e z utilizzando il Teach Pendant.
- Utilizzo il mio quaderno di ingegneria per registrare le coordinate x, y e z di una posizione specifica.
- Organizzare il lavoro del nostro gruppo in modo da completare l'attività in modo collaborativo.
Successivamente, crea insieme degli obiettivi di apprendimento basati sul tuo elenco. Pensa a come ciascuna delle cose che hai elencato può essere inquadrata in un obiettivo di apprendimento, utilizzando affermazioni del tipo "Io posso". Puoi usare questo modello per aiutarti a scrivere i tuoi obiettivi di apprendimento nel tuo quaderno di ingegneria.. (Google Doc / .docx / .pdf)
Ad esempio, la voce di elenco "Identifica i 6 assi sul braccio a 6 assi" può essere spostata sull'obiettivo di apprendimento "Posso identificare i 6 assi sul braccio a 6 assi".
La tabella seguente mostra un esempio di come compilare l'Organizzatore degli obiettivi di apprendimento nel tuo quaderno di progettazione.
| Categoria di obiettivi di apprendimento | Obiettivi di apprendimento |
|---|---|
|
Obiettivi di conoscenza Cosa devo sapere e capire per avere successo nell'Unità? |
|
|
Obiettivi di ragionamento Cosa posso fare con ciò che so e capisco per avere successo nell'Unità? |
|
|
Obiettivi di abilità Cosa posso dimostrare di aver compreso i concetti e le competenze necessarie per avere successo nell'Unità? |
|
Condividi i tuoi obiettivi di apprendimento con il tuo insegnante. Adattali secondo necessità in modo che tu, il tuo gruppo e il tuo insegnante siate tutti d'accordo.
Vocabolario
In questa unità, ti verranno presentati i concetti della robotica industriale, utilizzando elementi del kit CTE Workcell e VEXcode EXP. Questo elenco di vocabolario è qui per fornire un riferimento per eventuali nuovi termini che potresti incontrare. Registra questo vocabolario nel tuo quaderno di ingegneria. Utilizza questo elenco come riferimento mentre svolgi l'Unità e incontri parole che potrebbero non esserti familiari.
- Braccio robotico a 6 assi
- Un tipo di robot industriale con sei punti di rotazione o movimento, che offre un'ampia gamma di movimento e flessibilità nei compiti.
- Sistema di coordinate cartesiane
- Un sistema basato su griglia utilizzato per individuare posizioni nello spazio utilizzando coordinate (x, y, z) per descrivere posizioni precise di punti o oggetti.
- Automazione industriale
- L'automazione industriale è l'uso di tecnologie e macchine per semplificare e migliorare i processi di produzione e fabbricazione nelle fabbriche, garantendo efficienza, coerenza e sicurezza.
- Robot industriali
- Macchine automatizzate in grado di svolgere compiti in vari ambienti industriali, spesso con maggiore precisione e resistenza rispetto ai lavoratori umani.
- Movimento manuale
- Il processo di spostamento fisico del braccio a 6 assi per raccogliere dati di coordinate o eseguire attività specifiche senza programmazione automatica.
- Origine
- La posizione da cui partono tutti i valori delle coordinate cartesiane, (0,0,0).
- Insegnare ciondolo
- Un dispositivo utilizzato per controllare le azioni di un braccio robotico.
- Punto centrale dell'utensile (TCP)
- Il punto all'estremità di un braccio robotico o di un utensile utilizzato come riferimento per movimenti e coordinate.
- Cella di lavoro
- Una disposizione efficiente di attrezzature e macchinari progettata per ottimizzare i processi di produzione.
- Codice VEX EXP
- Il software utilizzato per la codifica e il controllo del braccio a 6 assi.
| Quantità | Materiali necessari |
|---|---|
| 1 per gruppo |
Kit cella di lavoro VEX CTE |
| 1 per gruppo |
Computer |
| 1 per gruppo |
Codice VEX EXP |
| 1 per studente |
Quaderno di ingegneria |
Seleziona Avanti > a Scopri di più sulla robotica industriale.