
練習する
「学習」セクションでは、動作を分解してロボットがたどる経路を計画する方法を学びました。 また、VEXcode IQ の [Spin] ブロックと [Spin for] ブロックを使用してロボットのアームと爪をコーディングする方法も学びました。 この実践セクションでは、その学習を自律動作の実践アクティビティに適用し始めます。
このアクティビティでは、VEXcode IQ プロジェクトを作成して、1 つの IQ キューブを別の IQ キューブの上に積み重ね、得点ゾーンで追加のキューブを得点します。 以下のビデオに従って、アクティビティの動作を分解してください。 次に、これらの動作を使用して、自律動作の練習アクティビティ用のプロジェクトの作成を開始できます。
次は、あなたが自律動作の練習アクティビティを完了する番です。
このアニメーションでは、ロボットは最初のキューブまで運転してそれを拾い上げ、次に一致する得点ゾーンまで運転してフィールドに固定されたキューブ上にキューブを置きます。 次に、ロボットはもう一方のキューブを得点ゾーンに移動します。 このアニメーションは、自律動作の実践アクティビティを完了するためにプロジェクトを作成する方法の一例にすぎません。
この文書を参考として使用して、練習アクティビティを完了してください。 Google ドキュメント / .docx / .pdf
自律移動アクティビティを完了したら、プロジェクトとテストをエンジニアリング ノートブックに文書化します。
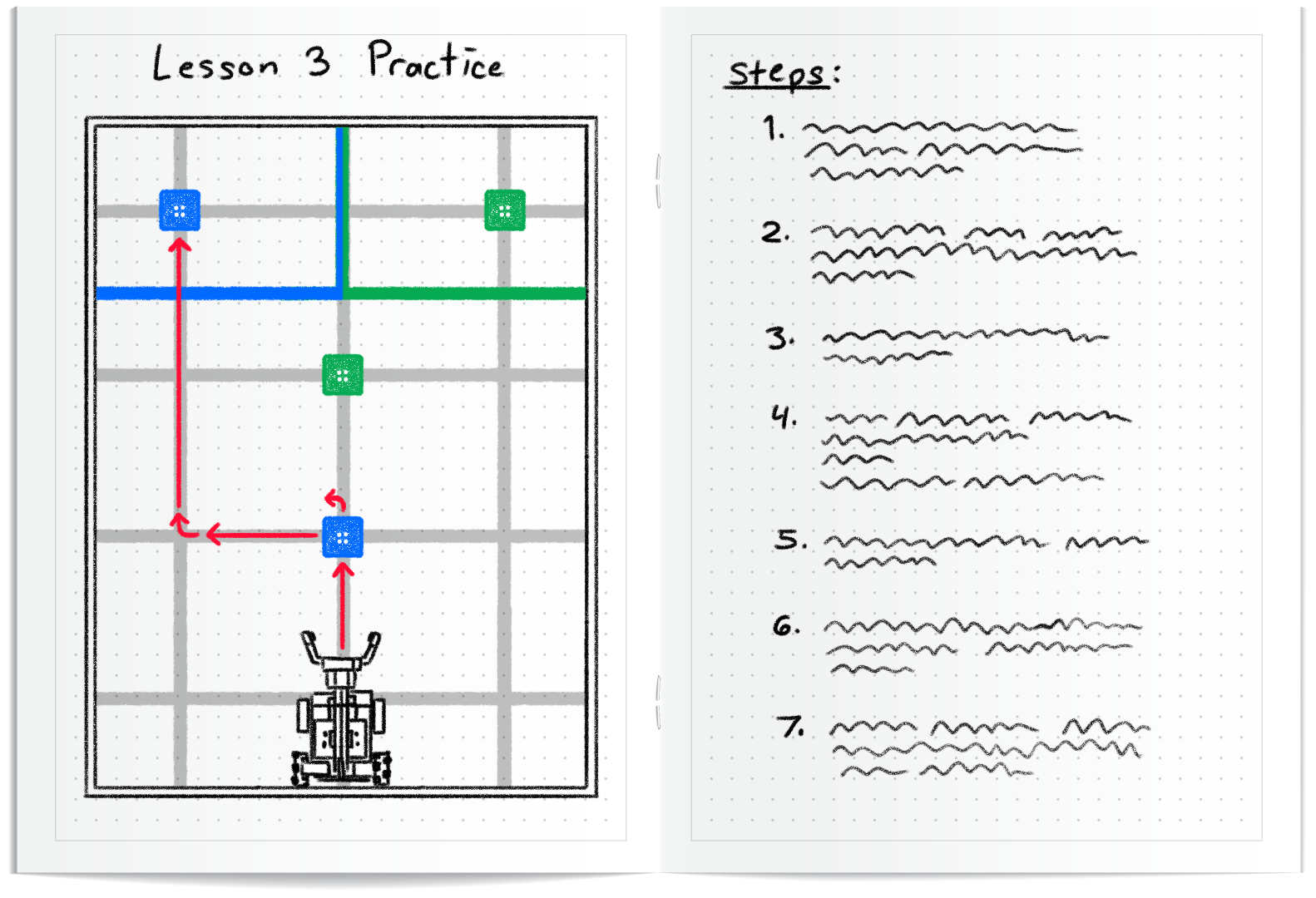
- スケッチを描いて、アクティビティを完了するためにロボットがどのように動くべきかを示します
- スケッチに基づいてプロジェクトを作成するために必要な手順をリストします。
- 各反復後に加えた変更を文書化する
プロジェクトのアイデアとテストを記録する方法の例については、左側の画像を参照してください。
チャレンジの準備をする
Compete (次のページ) では、Coding for Cubes Challenge で 1 つのキューブを積み上げ、別のキューブを得点するようにロボットをコーディングします。 一番速いタイムが勝ちです! チャレンジで競争する方法を学び、理解を確認してから、チャレンジに向けて練習します。
このチャレンジの目標は、得点エリアにあるキューブを 1 つ積み上げて、両方を最速の時間で得点することです。
このアニメーションを見て、Clawbot が両方のキューブを正常にスコアリングする例を確認してください。
このチャレンジを完了する方法の詳細については、このドキュメントの手順に従ってください。 Googleドキュメント / .docx / .pdf
理解を確認してください
チャレンジを開始する前に、エンジニアリング ノートブック内の以下の文書の質問に答えて、チャレンジのルールと設定を理解していることを確認してください。
理解度を確認するための質問 Google ドキュメント / .docx / .pdf
問題を完了したら、課題を練習してみてください。
Next > を選択して、「 for Cubes」チャレンジに参加します。