
Compete
Now that you have practiced coding your robot to collect and score cubes autonomously, you are ready for the Coding for Cubes Challenge!
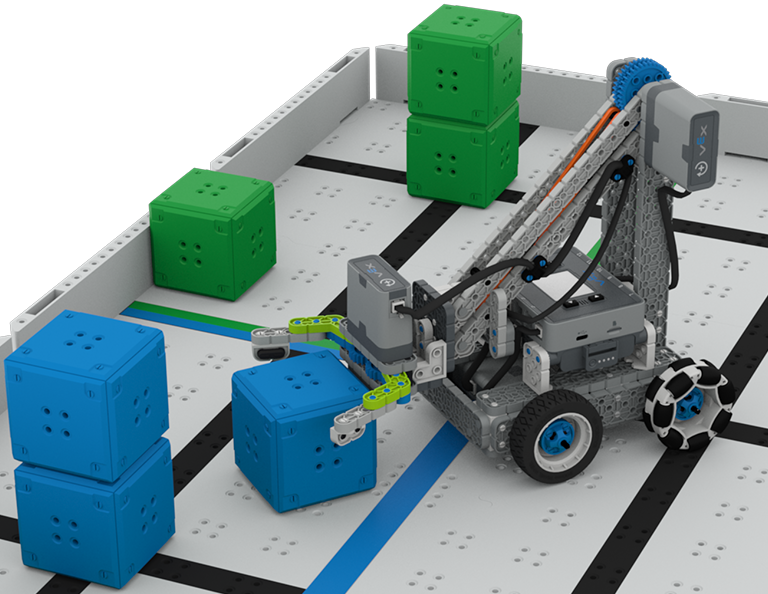
The goal of this challenge is to score both cubes in their correct scoring zones by stacking one and moving the other into the zone, in the fastest time possible. The animation below shows an example of how to set up the Field and begin the challenge. You will see the robot drive autonomously to score both cubes – one stacked and one moved into the scoring zone.
In the animation, a Clawbot starts at the far right wall of the Cube Collector Field with two cubes in front of it, one blue and one green. At the top of the video, there is a stopwatch and a Brain icon. After a countdown, the timer starts and the Clawbot drives forward, pushing the green cube forward into the green scoring zone. The robot grasps the blue cube with its claw, picks it up, and stacks it on the blue cube in the blue scoring zone on the left. Once the cube is placed, the timer stops.
Follow the steps in this document to complete the Coding for Cubes Challenge.
Google Doc / .docx / .pdf
Once you have completed the Coding for Cubes Challenge, check in with your teacher. Ensure you have documented the results of the challenge in your engineering notebook.
Wrap Up Reflection
Now that you have developed a strategy and coded your autonomous project for the Coding for Cubes Challenge, it is time to reflect on what you have learned and done in this Lesson. Start a new page in your engineering notebook to start your reflection.
Rate yourself as a novice, apprentice, or expert on each of the following concepts in your engineering notebook. Provide a brief explanation for why you gave yourself that rating for each concept:
- Using spin commands in VEXcode IQ to open and close the claw and raise and lower the arm of the Clawbot
- Planning a path in order to build a VEXcode IQ project that stacks and scores cubes effectively
- Collaborating with my team members to create a coding project to compete in the Coding for Cubes Challenge
Use this table to help you determine which category you fall under.
| Expert | I feel that I fully understood the concept and could teach this to someone else. |
| Apprentice | I feel that I understood the concept enough to compete in the challenge. |
| Novice | I feel that I did not understand the concept and do not know how to complete the challenge. |
What's Next?
In this Lesson, you learned about the importance of path planning, and how to use the spin commands to control the claw and arm motors. You also learned how to prepare for an autonomous challenge by planning, building and iterating on a VEXcode IQ project to stack and score cubes in the Coding for Cubes Challenge.
In the next Lesson, you will:
- Learn about customizing driver controls
- Use the Controller with VEXcode IQ to optimize your driver strategy
- Develop an autonomous and a driver control strategy to compete in the Split Decision Challenge
Select < Return to Lessons to go back to the Lesson Overview.
Select Next Lesson > to continue to Lesson 4 to learn about customizing driver controls.