
ก่อนหน้านี้ในหน่วยนี้คุณได้เรียนรู้วิธีการ:
- ระบุความสำคัญของพาเลทในโลจิสติกส์การขนส่ง
- ป้อนรหัสแขน 6 แกนเพื่อหยิบและวางหลายลูกบาศก์ บนพาเลทที่สัมพันธ์กับตำแหน่งคงที่
- ใช้ตัวแปรเพื่อจัดเก็บจำนวนลูกบาศก์ที่ย้ายในโครงการ VEXcode
คุณเริ่มต้นหน่วยนี้ด้วยการแนะนำว่าแขนหุ่นยนต์มีปฏิสัมพันธ์กับพาเลทอย่างไรและความสำคัญของพาเลทในการขนส่งผลิตภัณฑ์อย่างมีประสิทธิภาพ จากนั้นคุณได้เรียนรู้วิธีเขียนรหัสแขน 6 แกนเพื่อหยิบและวางลูกบาศก์บนพาเลทโดยใช้แม่เหล็ก หลังจากนั้นคุณได้เรียนรู้วิธีใช้การเคลื่อนที่สัมพัทธ์พร้อมกับตัวแปรเพื่อเขียนรหัสแขน 6 แกนเพื่อเลือกและวางลูกบาศก์หลายก้อนในตำแหน่งบนพาเลทที่สัมพันธ์กับตำแหน่งคงที่ ตอนนี้คุณจะรวมทุกสิ่งที่คุณได้เรียนรู้เพื่อสร้างโปรเจกต์เพื่อรับและวางลูกบาศก์แปดก้อนบนพาเลทสองพาเลท
การรวมกิจกรรมทั้งหมดเข้าด้วยกัน
ในกิจกรรมนี้คุณจะต้องใส่รหัสแขน 6 แกนเพื่อย้ายลูกบาศก์แปดลูกไปยังพาเลท ดูภาพเคลื่อนไหวนี้เพื่อดูวิธีหนึ่งที่แขน 6 แกนสามารถเคลื่อนที่ได้เพื่อทำกิจกรรมให้เสร็จสมบูรณ์
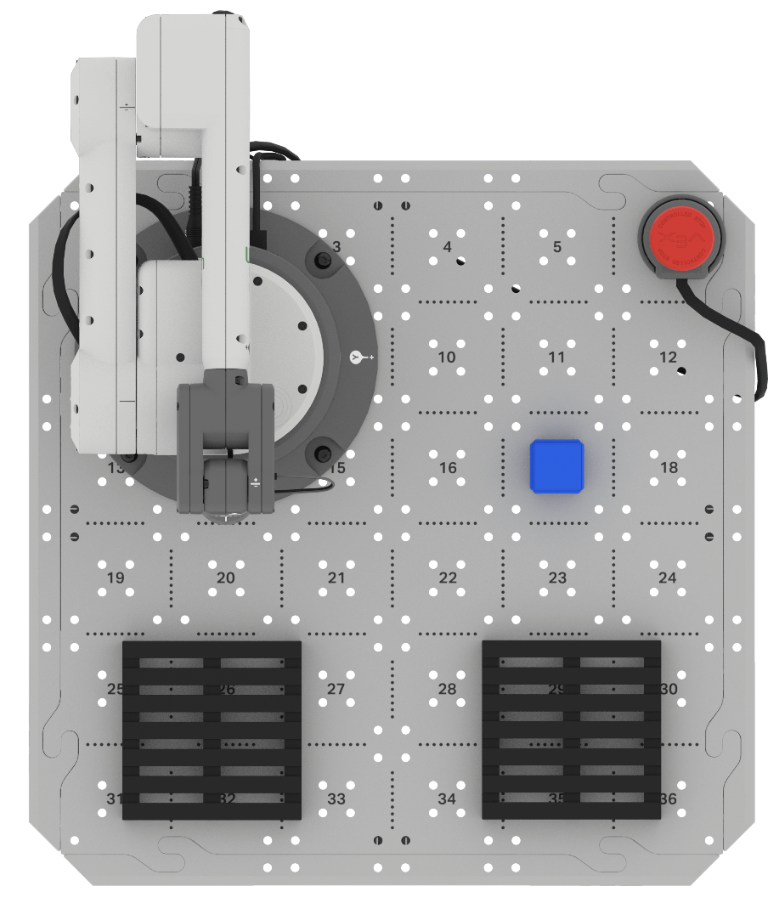
ตั้งค่า: วางลูกบาศก์หนึ่งอันที่โซนโหลด โซนโหลดตั้งอยู่ที่ตำแหน่งกระเบื้อง 17
กิจกรรม: สร้างโครงการ VEXcode สำหรับแขน 6 แกนเพื่อใช้แม่เหล็กเพื่อย้ายลูกบาศก์แปดก้อนจากโซนโหลดไปยังพาเลททั้งสอง
- วางแผนโครงการของคุณกับกลุ่มของคุณในสมุดบันทึกวิศวกรรมของคุณ ทำรายการของแต่ละพฤติกรรมแขน
6 แกนจะต้องเสร็จสมบูรณ์เพื่อย้าย ลูกบาศก์ทั้งแปดไปยังพาเลททั้งสอง
- ในขณะที่คุณวางแผนโครงการของคุณโปรดจำไว้ว่าการเคลื่อนไหวสัมพัทธ์จะขึ้นอยู่กับสถานที่เริ่มต้นหนึ่งชุด ท่านอาจนำรหัสบางส่วนจาก โปรเจกต์บทที่ 3 กลับมาใช้ใหม่ได้
- สร้างโปรเจกต์ของคุณใน VEXcode EXP.
- สำหรับกิจกรรมนี้คุณสามารถปรับเปลี่ยนโปรเจกต์จากยูนิตนี้หรือเริ่มต้นด้วยโปรเจกต์บล็อก ใหม่ หากคุณเลือกที่จะแก้ไขโปรเจกต์ที่มีอยู่แล้วอย่าลืมเปลี่ยนชื่อและบันทึกโปรเจกต์ก่อนที่คุณจะเริ่มแก้ไข
- เรียกใช้โปรเจกต์ของคุณเพื่อทดสอบ
- หลังจากรับลูกบาศก์แต่ละก้อนแล้วให้วางลูกบาศก์เพิ่มเติมที่โซนโหลด ทำสิ่งนี้ในขณะที่โปรเจกต์กำลังทำงานตามที่แสดงในภาพเคลื่อนไหวด้านบน
- หลังจากที่โครงการเสร็จสิ้นแล้วให้ไตร่ตรองถึงสิ่งที่เกิดขึ้น แขน 6 แกนย้าย ลูกบาศก์ทั้งแปดไปยังพาเลทได้สำเร็จหรือไม่? หากไม่ใช่ ให้แก้ไขโปรเจกต์ของคุณแล้วลองอีกครั้ง
- หลังจากทำกิจกรรมเสร็จแล้วให้ตั้งชื่อและบันทึกโปรเจกต์ลงในอุปกรณ์ของคุณ
- บันทึกกระบวนการของคุณลงในสมุดบันทึกวิศวกรรมของคุณ อย่าลืมบันทึกการเปลี่ยนแปลงแต่ละครั้งที่คุณทำกับโปรเจกต์ของคุณ
สรุปการไตร่ตรอง
ตอนนี้คุณได้กำหนดรหัสแขน 6 แกนเพื่อเลือกและวางลูกบาศก์แปดก้อนบนพาเลทถึงเวลาที่จะทบทวนสิ่งที่คุณได้เรียนรู้และทำในหน่วยนี้แล้ว
ให้คะแนนตัวเองว่าเป็นมือใหม่ฝึกหัดหรือผู้เชี่ยวชาญในแต่ละแนวคิดต่อไปนี้ในสมุดบันทึกวิศวกรรมของคุณ ให้คำอธิบายสั้นๆเกี่ยวกับเหตุผลที่คุณให้คะแนนตัวเองสำหรับแต่ละแนวคิด:
- การระบุความสำคัญของพาเลทในโลจิสติกส์การขนส่ง
- การเข้ารหัสแขน 6 แกนโดยใช้แม่เหล็กเพื่อหยิบและวางลูกบาศก์ บนพาเลท
- การเข้ารหัสแขน 6 แกนโดยใช้แม่เหล็กเพื่อหยิบและวางลูกบาศก์หลายอันบนพาเลทสองอันโดยสัมพันธ์กับตำแหน่งเริ่มต้น
ใช้ตารางนี้เพื่อช่วยคุณกำหนดว่าคุณอยู่ในหมวดหมู่ใด
|
ผู้เชี่ยวชาญ |
ฉันรู้สึกว่าฉันเข้าใจแนวคิดนี้อย่างถ่องแท้และสามารถสอนเรื่องนี้ให้กับคนอื่นได้ |
| เด็กฝึกงาน | ฉันรู้สึกว่าฉันเข้าใจแนวคิดมากพอที่จะทำกิจกรรม ให้เสร็จสมบูรณ์ |
| มือใหม่ | ฉันรู้สึกว่าฉันไม่เข้าใจแนวคิดและไม่รู้ว่าจะทำกิจกรรมให้เสร็จได้อย่างไร |
จากนั้นทบทวนเป้าหมายการเรียนรู้ที่ท่านร่วมสร้างกับครูของท่านสำหรับหน่วยนี้ คุณได้เรียนรู้สิ่งที่คุณตั้งเป้าหมายที่จะเรียนรู้หรือไม่? เหตุใดจึงรู้สึกเช่นนั้น? คุณประสบความสำเร็จมากที่สุดในเรื่องใด? เพราะเหตุใด? คุณคิดว่าคุณจะต่อยอดความก้าวหน้าของคุณไปข้างหน้าได้อย่างไร?
แต่ละคนในกลุ่มของคุณควรทบทวนตนเองให้เสร็จสมบูรณ์ในสมุดบันทึกวิศวกรรมของพวกเขา เมื่อทุกคนในกลุ่มของคุณพิจารณาตนเองเสร็จแล้วให้เช็คอินกับครูของคุณและแจ้งให้พวกเขาทราบว่าคุณพร้อมสำหรับการสนทนาเพื่อซักถามแล้ว
การสนทนาสรุป

เลือก < กลับไปที่ยูนิต เพื่อกลับไปที่ยูนิตทั้งหมด