
แข่งขัน
ตอนนี้คุณได้เรียนรู้วิธีการเขียนโค้ดให้หุ่นยนต์ผลักลูกบาศก์ออกจากสนามที่ยกสูงได้โดยอัตโนมัติแล้ว คุณก็พร้อมสำหรับการท้าทาย Sweep the Field แล้ว
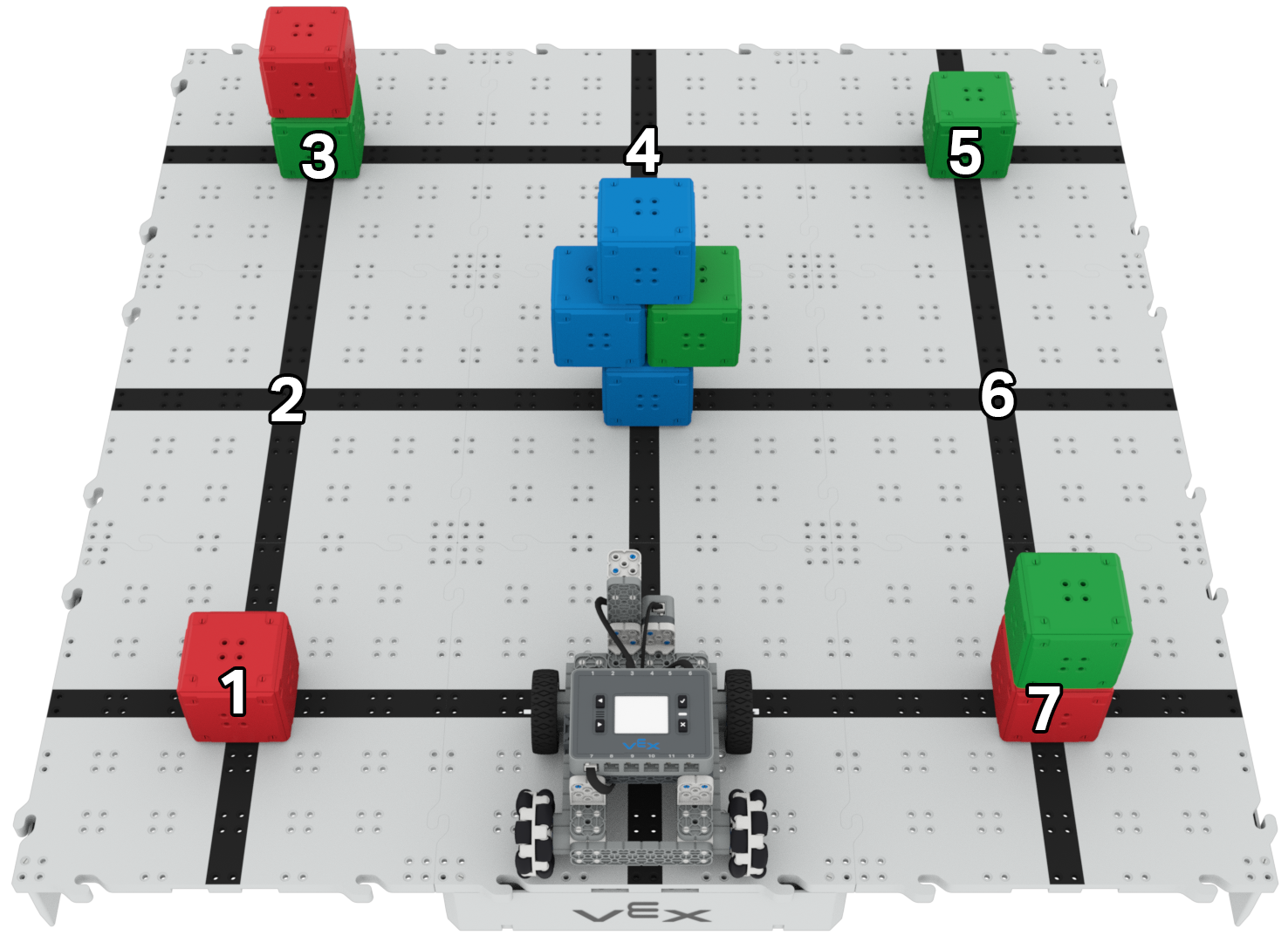
เป้าหมายของความท้าทายนี้คือการเคลียร์ลูกบาศก์ 4 ลูกจากสนามให้ได้เร็วที่สุด แอนิเมชั่นด้านล่างนี้แสดงให้เห็นการตั้งค่าสนามโดยมีลูกบาศก์สี่ลูกอยู่รอบหุ่นยนต์ตรงกลาง และมีเส้นทางที่เป็นไปได้หนึ่งเส้นทางในการเคลียร์ลูกบาศก์ออกจากสนาม หุ่นยนต์ที่เคลียร์ลูกบาศก์ได้เร็วที่สุดจะเป็นผู้ชนะ
ทำตามขั้นตอนในเอกสารนี้เพื่อทำภารกิจ Sweep the Field Challenge ให้เสร็จสิ้น
เมื่อคุณทำ Sweep the Field Challenge เสร็จแล้ว ให้ไปติดต่อครูของคุณ ให้แน่ใจว่าคุณได้บันทึกผลลัพธ์ของความท้าทายไว้ในสมุดบันทึกวิศวกรรมของคุณแล้ว
สรุปการสะท้อนความคิด
ตอนนี้คุณได้สร้างกลยุทธ์และแข่งขันใน Sweep the Field Challenge แล้ว ถึงเวลาที่จะทบทวนสิ่งที่คุณได้เรียนรู้และได้ทำในบทเรียนนี้ เริ่มหน้าใหม่ในสมุดบันทึกวิศวกรรมของคุณเพื่อเริ่มต้นการสะท้อนความคิดของคุณ
ให้คะแนนตัวเองในฐานะมือใหม่ ผู้ฝึกหัด หรือผู้เชี่ยวชาญในแต่ละแนวคิดต่อไปนี้ในสมุดบันทึกวิศวกรรมของคุณ ให้คำอธิบายสั้นๆ ว่าเหตุใดคุณจึงให้คะแนนตัวเองในแต่ละแนวคิดดังนี้:
- การใช้เซ็นเซอร์ในโครงการ VEXcode IQ
- การสร้างอัลกอริทึมโดยใช้เซ็นเซอร์ระยะทางและออปติคัล
- ร่วมมือกับสมาชิกในทีมเพื่อปรับปรุงประสิทธิภาพของหุ่นยนต์ในการแข่งขัน Sweep the Field Challenge
ใช้ตารางนี้เพื่อช่วยคุณกำหนดว่าคุณอยู่ในหมวดหมู่ใด
| ผู้เชี่ยวชาญ | ฉันคิดว่าฉันเข้าใจแนวคิดนี้เป็นอย่างดีและสามารถสอนเรื่องนี้ให้กับคนอื่นได้ |
| ลูกจ้างฝึกงาน | ฉันรู้สึกว่าตนเองเข้าใจแนวคิดเพียงพอที่จะแข่งขันความท้าทายนี้ได้ |
| สามเณร | ฉันรู้สึกว่าฉันไม่เข้าใจคอนเซปต์และไม่รู้ว่าจะทำความท้าทายนี้ให้สำเร็จได้อย่างไร |
ต่อไปจะเป็นอะไร?
ในบทเรียนนี้ คุณได้เพิ่มเซนเซอร์ออปติคัลให้กับหุ่นยนต์ของคุณและเขียนโค้ดอัลกอริทึมเพื่อเคลียร์ลูกบาศก์ออกจากสนาม ตอนนี้ถึงเวลาเข้าแข่งขัน Castle Crasher Competition แล้ว!
ในบทเรียนถัดไป คุณจะ:
- ทบทวนกฎกติกาการแข่งขัน
- พัฒนากลยุทธ์เกม
- เข้าร่วมการแข่งขัน Castle Crasher!
เลือก < กลับไปที่บทเรียน เพื่อกลับไปยังภาพรวมบทเรียน
เลือก ถัดไป บทเรียน > เพื่อไปต่อที่บทเรียนที่ 5 และเรียนรู้วิธีการเข้าร่วมการแข่งขัน Castle Crasher!