
Phạm vi chuyển động
![]()
Phạm vi chuyển động
Robot thường bao gồm một số hệ thống cơ khí như cánh tay, móng vuốt và hệ thống truyền động. Các hệ thống cơ học này tạo ra nhiều loại chuyển động khác nhau, cho phép robot hoàn thành các nhiệm vụ khác nhau. Mỗi hệ thống con có phạm vi chuyển động riêng,là thuật ngữ dùng để mô tả phạm vi quay hoặc trượt trước khi đạt đến một giới hạn nào đó.
Các hệ thống con như hệ thống truyền động thường có phạm vi chuyển động đầy đủ, vì động cơ, bánh răng và bánh xe có thể quay tự do liên tục mà không đạt đến bất kỳ giới hạn nào. Điều này rất quan trọng vì robot có thể cần phải di chuyển một khoảng cách đáng kể để hoàn thành nhiệm vụ.
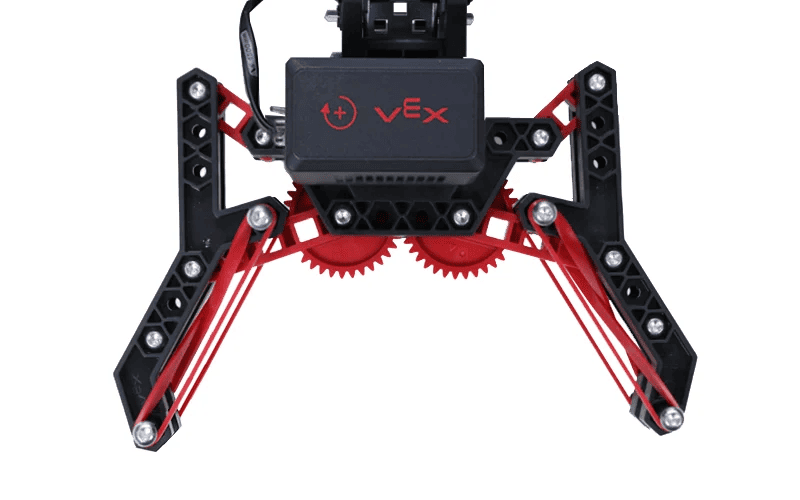
Các hệ thống con như móng vuốt hoặc cánh tay thường có phạm vi chuyển động hạn chế, khiến chúng không thể quay liên tục. Móng vuốt chỉ có thể mở hoặc đóng đến một mức nhất định trước khi đạt đến giới hạn cơ học. Tương tự như vậy, phạm vi chuyển động của cánh tay thường bị giới hạn bởi mặt đất hoặc thân của chính robot. Khi làm việc với các hệ thống con có phạm vi chuyển động hạn chế, điều rất quan trọng là phải giữ trong phạm vi đó, bất kể bạn đang điều khiển robot từ xa hay lập trình để nó di chuyển tự động. Việc tiếp tục cung cấp điện cho động cơ khi hệ thống con đã đạt đến giới hạn sẽ gây ra áp lực không cần thiết cho động cơ và bất kỳ bộ phận nào được kết nối.
![]() Hộp công cụ giáo viên
Hộp công cụ giáo viên
Khi lần đầu lập trình tay và móng vuốt, học sinh thường sẽ đạt đến giới hạn cơ học của thiết bị và không hiểu tại sao dự án dường như dừng lại ở điểm đó và không tiến triển. Điều này xảy ra vì dự án không thể xoay động cơ theo số cụ thể. Nếu số vòng quay vượt quá giới hạn về mặt vật lý của động cơ, dự án sẽ tiếp tục chờ động cơ đạt đến số đó.