
Bewegingsbereik
![]()
Bewegingsbereik
Robots bestaan vaak uit verschillende mechanische subsystemen, zoals armen, klauwen en aandrijflijnen. Deze mechanische subsystemen creëren verschillende soorten bewegingen, waardoor de robot verschillende taken kan uitvoeren. Elk subsysteem heeft zijn eigen bewegingsbereik.is de term die wordt gebruikt om aan te geven hoe ver het kan draaien of glijden voordat het een bepaalde limiet bereikt.
Subsystemen zoals de aandrijflijn hebben doorgaans een volledig bewegingsbereik, omdat de motoren, tandwielen en wielen continu vrij kunnen draaien zonder dat ze een limiet bereiken. Dit is belangrijk, omdat de robot soms grote afstanden moet afleggen om een taak uit te voeren.
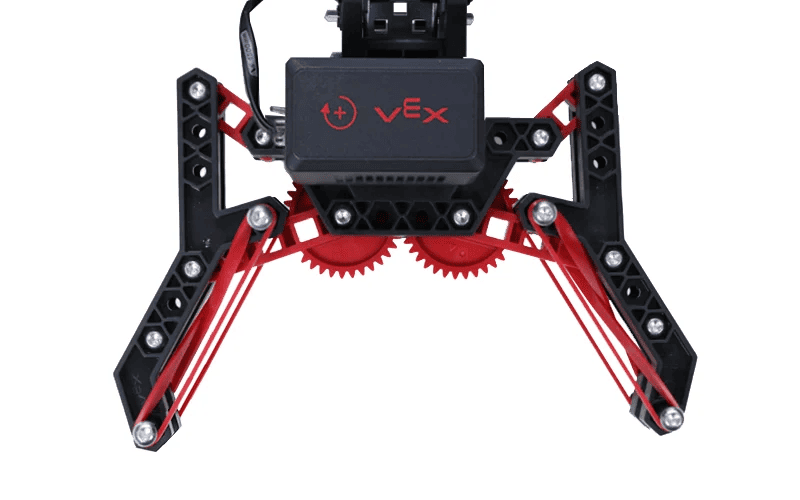
Subsystemen zoals klauwen of armen hebben doorgaans een beperkte bewegingsvrijheid, waardoor ze niet continu kunnen ronddraaien. Klauwen kunnen slechts een bepaalde mate van openen of sluiten voordat ze een mechanische limiet bereiken. Ook de bewegingsvrijheid van een arm wordt vaak beperkt door de grond of het lichaam van de robot zelf. Bij het werken met subsystemen met een beperkt bewegingsbereik is het erg belangrijk om binnen dat bereik te blijven, ongeacht of u de robot op afstand bestuurt of programmeert om autonoom te bewegen. Als u de motoren blijft voeden terwijl een subsysteem een limiet heeft bereikt, ontstaat er onnodige belasting op de motor en alle aangesloten componenten.
![]() Toolbox voor leraren
Toolbox voor leraren
Wanneer studenten voor het eerst armen en klauwen programmeren, bereiken ze vaak de mechanische limiet van hun apparaat en begrijpen ze niet waarom het project op dat punt lijkt te stoppen en niet verdergaat. Dit gebeurt omdat het project de motor niet naar het specifieke aantal kan draaien. Als een rotatienummer de limiet overschrijdt van wat fysiek beschikbaar is van een motor, blijft het project wachten totdat de motor dat nummer bereikt.