![]() 老師提示
老師提示
-
請學生使用尺或米尺來測量他們提議的路徑。 然後,讓學生在繼續開發他們的專案之前評估他們的偽代碼。
-
指導學生在專案中使用偽代碼作為註釋,以幫助組織、流程和故障排除。
-
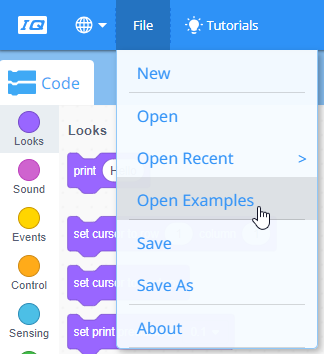
有關 [Comment] 塊的更多信息,請訪問 VEXcode IQ 中的幫助功能。 有關使用 VEXcode IQ 中的幫助工具的更多信息, 按此處。
-
指導您的學生在使用 VEXcode IQ 程式設計之前評估他們的偽代碼。 您可以透過點擊以下任何連結下載偽代碼標題 (Google Doc/.docx/.pdf)
-
請學生在工程筆記本中記錄整個規劃、實施、測試、迭代和最終解決方案,可用於評估學生的進度。 如果學生單獨使用筆記本,請使用工程筆記本個人 Rubric (Google Doc/.docx/.pdf) 進行評估。 或者,使用工程筆記本團隊反思 Rubric (Google Doc/.docx/.pdf) 評估小組/團隊工程筆記本。 請務必在學生開始工作之前與他們分享這些規則。
建立專案時請依照下列步驟操作:
-
使用繪圖和偽代碼規劃您想要對機器人進行程式設計的路徑 (Google Doc / .docx / .pdf)。
-
使用您在「播放」部分中建立的偽代碼來使用區塊開發您的專案。
-
經常測試您的項目,並使用您從測試中學到的知識對其進行迭代。
![]() 教師工具箱
-
偽代碼解決方案範例
教師工具箱
-
偽代碼解決方案範例
這裡 是學生收集包裹的偽代碼的範例 (Google Doc/.docx/.pdf)。 可以使用相同的格式來擴展偽代碼以取得多個包。
如果你想對他們的偽代碼進行評分,這裡有一個評分標準(Google Doc/.docx/.pdf)。 如果您打算使用此評估準則或任何評估準則,建議您在開始工作之前向學生展示該評估準則或給他們一份副本。
請注意,此範例以通用方式命名配置,以簡單的語言列出解決方案的各個部分和程序的後續部分,並以箭頭指示這些部分的順序。 這些都是該標題中逐項列出的功能。 此外,但不必要的是,此範例將三個包裹位置按照計劃的取貨順序進行了編號,並且該編號出現在 Clawbot 將接近的鋁罐側面。
如果您在入門時遇到困難,請查看 VEXcode IQ 中的以下範例項目:
-
向前(英吋或毫米)
-
向後(英吋或毫米)
-
左轉(度)
-
右轉(度)
-
爪子和手臂
-
使用利爪
-
使用手臂