
الدرس 2: استخدام مستشعر العين الأمامي مع [انتظر حتى]
في هذا الدرس، ستنشئ مشروعًا باستخدام مستشعر العين الأمامي مع كتلة [انتظر حتى] للتنقل في روبوت الواقع الافتراضي عبر ملعب متاهة القرص. سيوجه مشروعك روبوت الواقع الافتراضي للانعطاف يمينًا عند اكتشاف قرص أخضر، واليسار عند اكتشاف قرص أزرق بواسطة مستشعر العين الأمامي. في التحدي المصغر، ستطبق هذه المهارات لقيادة روبوت الواقع الافتراضي على كل قرص في ملعب متاهة القرص وتنتهي عند القرص الأحمر.

مخرجات التعلم
- حدد أنه يمكن استخدام كتلة [انتظر حتى] مع مستشعر العين.
اسم المشروع وحفظه
سيستخدم هذا المشروع كتلة [انتظر حتى] لإرشاد روبوت الواقع الافتراضي للتدوير عندما يكتشف مستشعر العين الأمامي أول قرص ملون (أخضر) على ملعب متاهة القرص.

-
ابدأ مشروعًا جديدًا في VEXcode VR واسم المشروع Unit7Lesson2.

-
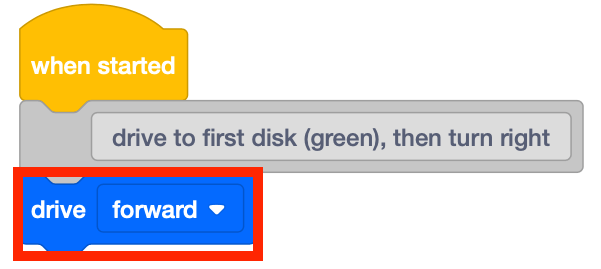
للبدء، سيحتاج روبوت الواقع الافتراضي إلى القيادة نحو القرص الأول على Disk Maze Playground. اسحب كتلة [Drive] إلى مساحة العمل. تذكر أنه يمكنك استخدام كتل VEXcode أو كتل Switch أو مزيج من كلا النوعين من الكتل لبناء مشروعك.
-
سيستخدم هذا المشروع التوضيحي كتل التعليقات لتذكير المستخدم بالهدف من سلوكيات روبوت الواقع الافتراضي خلال القسم التالي من المشروع.

-
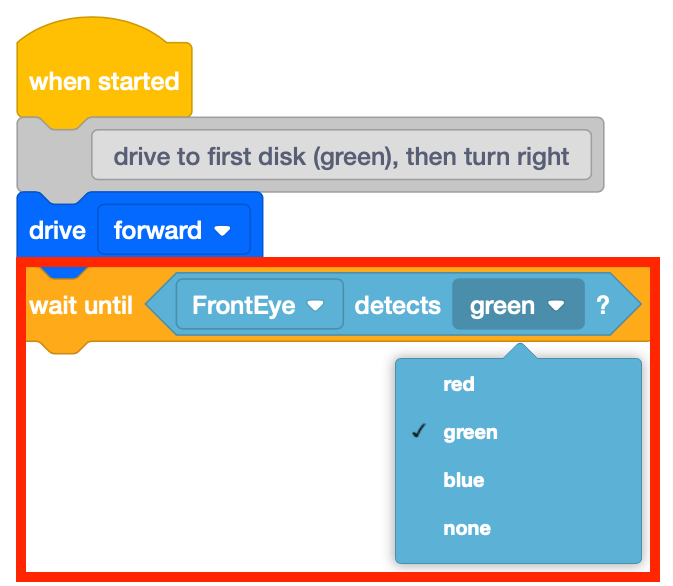
أضف كتلة [انتظر حتى] وضع <Color sensing> الكتلة في الداخل. سيكون القرص الأول الذي سيواجهه روبوت الواقع الافتراضي باللون الأخضر. حدد "أخضر" كاللون المراد اكتشافه.
-
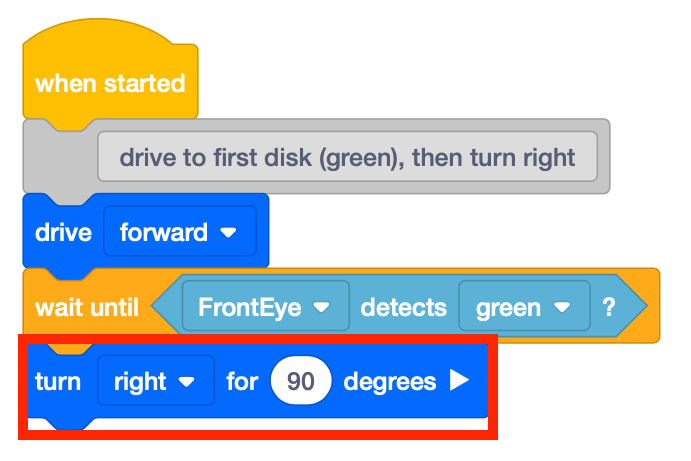
أضف كتلة [Turn for] لتوجيه روبوت الواقع الافتراضي للانعطاف يمينًا 90 درجة عندما يكتشف قرصًا أخضر.
- افتح Disk Maze Playground إذا لم يكن مفتوحًا بالفعل، وقم بتشغيل المشروع.
-
راقب روبوت الواقع الافتراضي وهو يتقدم إلى القرص الأخضر الأول ثم انعطف يمينًا.

- لاحظ أن روبوت الواقع الافتراضي يتحرك للأمام حتى تصبح حالة <Color sensing> الكتلة صحيحة. بعد ذلك، يقوم بتنفيذ الكتلة التالية في المكدس، وهي الانعطاف يمينًا لمدة 90 درجة.
قم بتحديد زر التالي للمتابعة مع بقية هذا الدرس.