
পাঠ ২: [অপেক্ষা করুন] এর সাথে ফ্রন্ট আই সেন্সর ব্যবহার করা
এই পাঠে, আপনি [অপেক্ষা করুন] ব্লকের সাহায্যে ফ্রন্ট আই সেন্সর ব্যবহার করে একটি প্রকল্প তৈরি করবেন যাতে ডিস্ক মেজ প্লেগ্রাউন্ডমাধ্যমে ভিআর রোবট নেভিগেট করা যায়। আপনার প্রকল্পটি VR রোবটকে নির্দেশ দেবে যে যখন একটি সবুজ ডিস্ক সনাক্ত করা হবে তখন ডানদিকে ঘুরতে হবে এবং যখন একটি নীল ডিস্ক ফ্রন্ট আই সেন্সর দ্বারা সনাক্ত করা হবে তখন বাম দিকে ঘুরতে হবে। মিনি চ্যালেঞ্জে, আপনি এই দক্ষতাগুলি প্রয়োগ করে ডিস্ক মেজ প্লেগ্রাউন্ড এর প্রতিটি ডিস্কে VR রোবট চালাবেন এবং লাল ডিস্কে শেষ করবেন।

শেখার ফলাফল
- [অপেক্ষা করুন] ব্লকটি আই সেন্সরের সাথে ব্যবহার করা যেতে পারে কিনা তা চিহ্নিত করুন।
প্রকল্পের নাম দিন এবং সংরক্ষণ করুন
এই প্রকল্পটি [অপেক্ষা করুন] ব্লক ব্যবহার করে VR রোবটকে নির্দেশ দেবে যখন ফ্রন্ট আই সেন্সর ডিস্ক মেজ প্লেগ্রাউন্ড-এ প্রথম (সবুজ) রঙের ডিস্কটি সনাক্ত করবে।

-
VEXcode VR-এ একটি নতুন প্রকল্প শুরু করুন এবং প্রকল্পটির নাম দিন Unit7Lesson2।

-
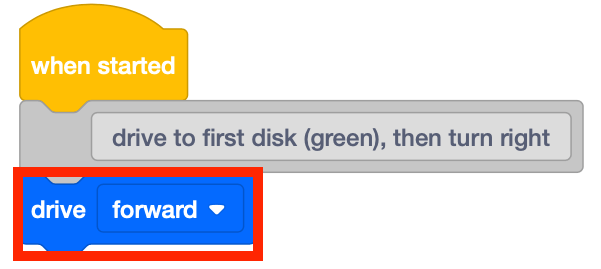
শুরু করার জন্য, VR রোবটটিকে Disk Maze Playgroundএর প্রথম ডিস্কের দিকে গাড়ি চালাতে হবে। [ড্রাইভ] ব্লকটি কাজের জায়গায় টেনে আনুন। মনে রাখবেন যে আপনি আপনার প্রকল্পটি তৈরি করতে VEXcode ব্লক, সুইচ ব্লক, অথবা উভয় ধরণের ব্লকের সংমিশ্রণ ব্যবহার করতে পারেন।
-
এই উদাহরণ প্রকল্পটি ব্যবহারকারীকে মনে করিয়ে দেওয়ার জন্য মন্তব্য ব্লক ব্যবহার করবে যে প্রকল্পের নিম্নলিখিত বিভাগে ভিআর রোবটের আচরণের জন্য উদ্দেশ্য কী।

-
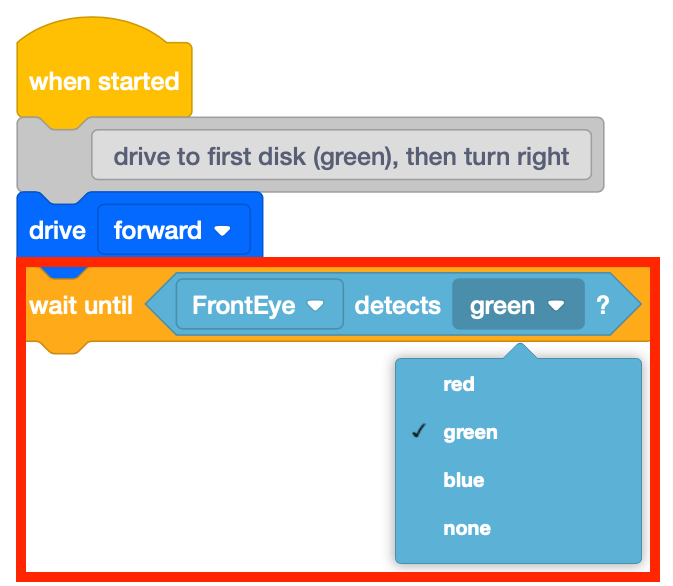
[অপেক্ষা করুন] ব্লক যোগ করুন এবং ভিতরে <Color sensing> ব্লক রাখুন। VR রোবট যে প্রথম ডিস্কের মুখোমুখি হবে তা সবুজ হবে। সনাক্ত করা রঙ হিসাবে 'সবুজ' নির্বাচন করুন.
-
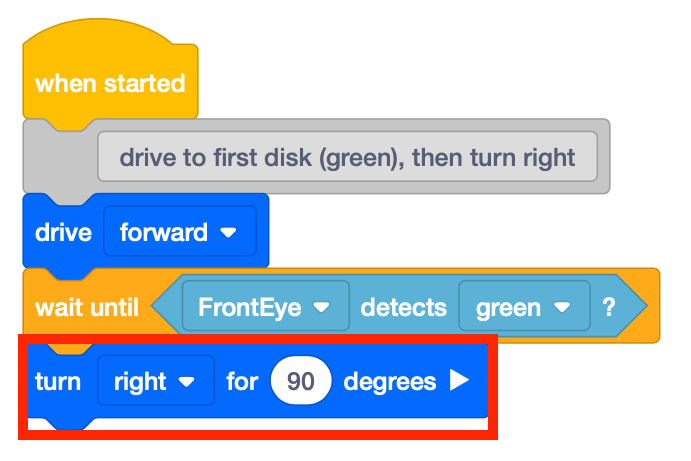
VR রোবট যখন একটি সবুজ ডিস্ক সনাক্ত করে তখন ডানদিকে 90 ডিগ্রি ঘুরতে নির্দেশ দেওয়ার জন্য একটি [টার্ন ফর] ব্লক যোগ করুন।
- ডিস্ক মেজ প্লেগ্রাউন্ড খুলুন যদি এটি ইতিমধ্যে খোলা না থাকে এবং প্রকল্পটি চালান।
-
VR রোবটটিকে প্রথম সবুজ ডিস্কের দিকে এগিয়ে দেখুন তারপর ডানদিকে ঘুরুন।

- লক্ষ্য করুন যে VR রোবটটি <Color sensing> ব্লকের অবস্থা সত্য না হওয়া পর্যন্ত এগিয়ে চলে। তারপর, এটি স্ট্যাকের পরবর্তী ব্লকটি কার্যকর করে, যা 90 ডিগ্রির জন্য ডানদিকে ঘুরতে হয়।
এই পাঠের বাকি অংশটি চালিয়ে যেতে পরবর্তী বোতামটি নির্বাচন করুন।