
Lição 2: Usando o Sensor do Olho Frontal com [Aguarde até]
Nesta lição, você criará um projeto usando o Sensor de Olho Frontal com o bloco [Aguarde até] para navegar o Robô de RV pelo Playground do Labirinto de Disco. Seu projeto instruirá o Robô VR a virar à direita quando um disco verde for detectado e à esquerda quando um disco azul for detectado pelo Sensor de Olho Frontal. No mini desafio, você aplicará essas habilidades para conduzir o robô VR para cada disco no Disk Maze Playground e terminar no disco vermelho.

Resultados de Aprendizagem
- Identifique se o bloco [Aguarde até] pode ser usado com o sensor ocular.
Nomeie e guarde o projeto
Este projeto usará o bloco [Aguarde até] para instruir o Robô VR a girar quando o Sensor de Olho Frontal detectar o primeiro Disco colorido (verde) no Playground do Labirinto de Discos.

-
Inicie um novo projeto no VEXcode VR e nomeie o projeto Unit7Lesson2.

-
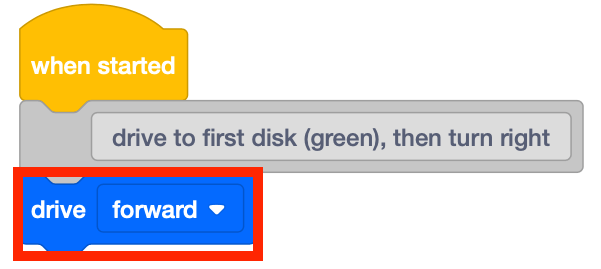
Para começar, o robô VR precisará dirigir-se para o primeiro disco no Disk Maze Playground. Arraste o bloco [Drive] para o espaço de trabalho. Lembre-se de que você pode usar blocos VEXcode, blocos Switch ou uma combinação de ambos os tipos de blocos para criar seu projeto.
-
Este projeto de exemplo usará blocos de comentários para lembrar ao utilizador qual é a intenção para os comportamentos do Robô VR durante a secção seguinte do projeto.

-
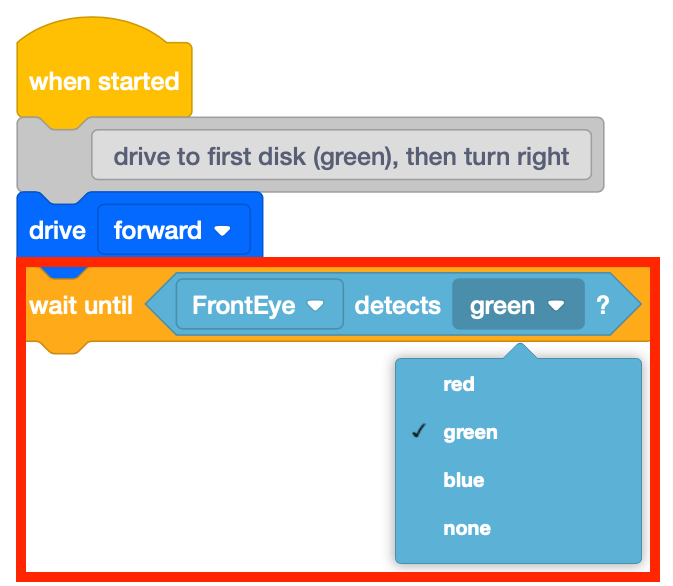
Adicione o bloco [Aguarde até] e coloque o <Color sensing> bloco dentro. O primeiro disco que o Robô VR encontrar estará verde. Selecione "verde" como a cor a ser detetada.
-
Adicione um bloco [Turn for] para instruir o Robô VR a virar à direita 90 graus quando detectar um disco verde.

- Abra o Disk Maze Playground, se ainda não estiver aberto, e execute o projeto.
-
Observe o robô VR avançar para o primeiro disco verde e, em seguida, vire à direita.

- Observe que o Robô VR avança até que a condição do <Color sensing> bloco seja relatada como VERDADEIRA. Em seguida, ele executa o próximo bloco na pilha, que é virar à direita por 90 graus.
Selecione o botão Seguinte para continuar com o resto desta lição.