
Lección 2: Uso del sensor del ojo delantero con [Espere hasta]
En esta lección, crearás un proyecto utilizando el sensor del ojo frontal con el bloque [Esperar hasta] para navegar por el robot de realidad virtual a través del patio de recreo del laberinto de discos. Su proyecto indicará al robot de realidad virtual que gire a la derecha cuando se detecte un disco verde y a la izquierda cuando el sensor de ojo frontal detecte un disco azul. En el mini desafío, aplicarás estas habilidades para conducir el Robot VR a cada disco en el Disk Maze Playground y terminar en el disco rojo.

Resultados de aprendizaje
- Identifique que el bloque [Esperar hasta] se puede utilizar con el sensor ocular.
Nombrar y guardar el proyecto
Este proyecto utilizará el bloque [Esperar hasta] para indicarle al robot de realidad virtual que gire cuando el sensor de ojo frontal detecte el primer disco de color (verde) en el área de juegos del laberinto de discos.

-
Inicie un nuevo proyecto en VEXcode VR y nombre el proyecto Unit7Lesson2.

-
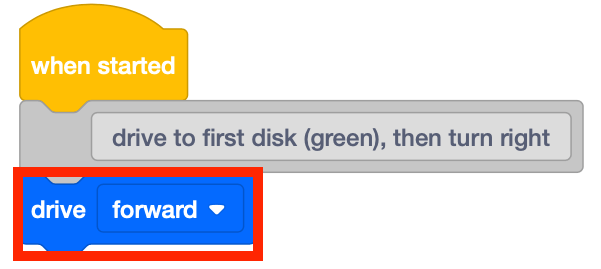
Para comenzar, el robot VR tendrá que conducir hacia el primer disco en el Disk Maze Playground. Arrastra el bloque [Drive] al espacio de trabajo. Recuerda que puedes usar bloques VEXcode, bloques Switch o una combinación de ambos tipos de bloques para crear tu proyecto.
-
Este proyecto de ejemplo utilizará bloques de comentarios para recordar al usuario cuál es la intención de los comportamientos del robot de realidad virtual durante la siguiente sección del proyecto.

-
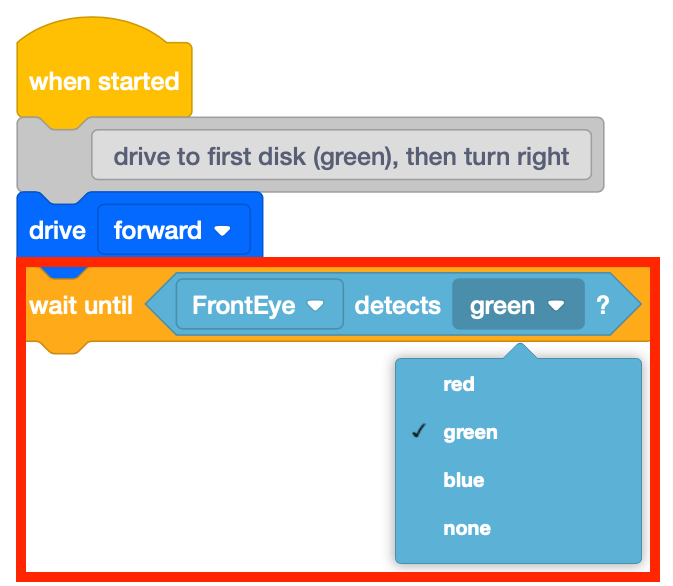
Añade el bloque [Esperar hasta] y coloca el <Color sensing> bloque dentro. El primer disco que encontrará el robot VR será verde. Seleccione ‘verde’ como el color a detectar.
-
Añada un bloque [Turn for] para indicarle al robot de realidad virtual que gire 90 grados a la derecha cuando detecte un disco verde.

- Abra el Disk Maze Playground si aún no está abierto y ejecute el proyecto.
-
Observa cómo el VR Robot avanza hasta el primer disco verde y luego gira a la derecha.

- Observe que el robot VR avanza hasta que la condición del <Color sensing> bloque se CONFIRMA. Luego, ejecuta el siguiente bloque en la pila, que es girar a la derecha 90 grados.
Seleccione el botón Siguiente para continuar con el resto de esta lección.