
2과: [대기까지]를 사용하여 전면 눈 센서 사용하기
이 수업에서는 [대기까지] 블록과 함께 전면 눈 센서를 사용하여 VR 로봇을 디스크 미로 놀이터로 이동시키는 프로젝트를 만듭니다. 귀하의 프로젝트에서는 VR 로봇이 전면 눈 센서에 녹색 디스크가 감지되면 오른쪽으로 회전하고, 파란색 디스크가 감지되면 왼쪽으로 회전하도록 지시합니다. 미니 챌린지에서는 이러한 기술을 적용하여 VR 로봇을 디스크 미로 놀이터 의 각 디스크로 운전하고 빨간색 디스크에서 마무리하게 됩니다.

학습 성과
- [대기까지] 블록이 Eye Sensor와 함께 사용될 수 있음을 확인합니다.
프로젝트 이름 지정 및 저장
이 프로젝트에서는 [대기까지] 블록을 사용하여 전방 눈 센서가 Disk Maze Playground에서 첫 번째(녹색) 색상의 Disk를 감지하면 VR 로봇이 회전하도록 지시합니다.

-
VEXcode VR에서 새 프로젝트를 시작하고 프로젝트 이름을 Unit7Lesson2로 지정합니다.

-
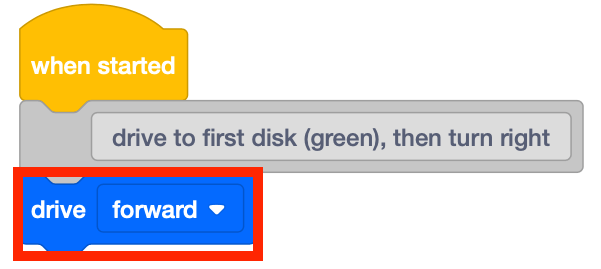
시작하려면 VR 로봇이 디스크 미로 놀이터의 첫 번째 디스크를 향해 주행해야 합니다. [드라이브] 블록을 작업 공간으로 끌어다 놓습니다. 프로젝트를 빌드할 때 VEXcode 블록, Switch 블록 또는 두 가지 블록 유형을 조합하여 사용할 수 있다는 점을 기억하세요.
-
이 예제 프로젝트에서는 주석 블록을 사용하여 프로젝트의 다음 섹션에서 VR 로봇의 동작에 대한 의도가 무엇인지 사용자에게 상기시킵니다.

-
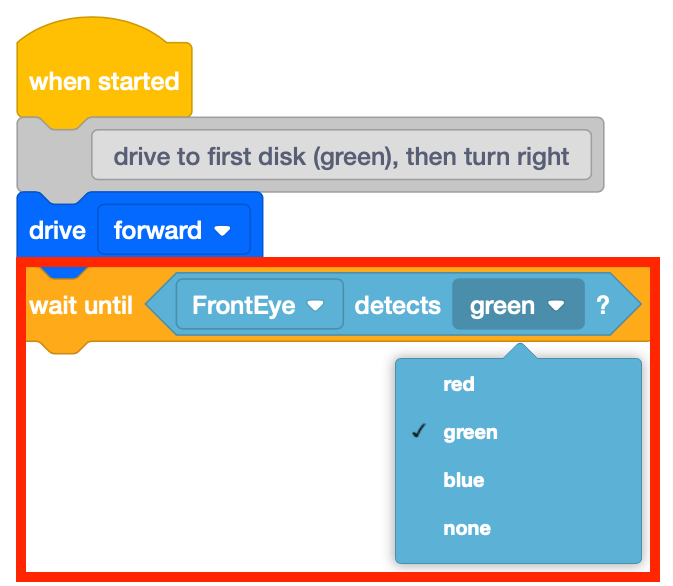
[Wait until] 블록을 추가하고 그 안에 <Color sensing> 블록을 넣습니다. VR 로봇이 처음 접하는 디스크는 녹색입니다. 감지할 색상으로 '녹색'을 선택하세요.
-
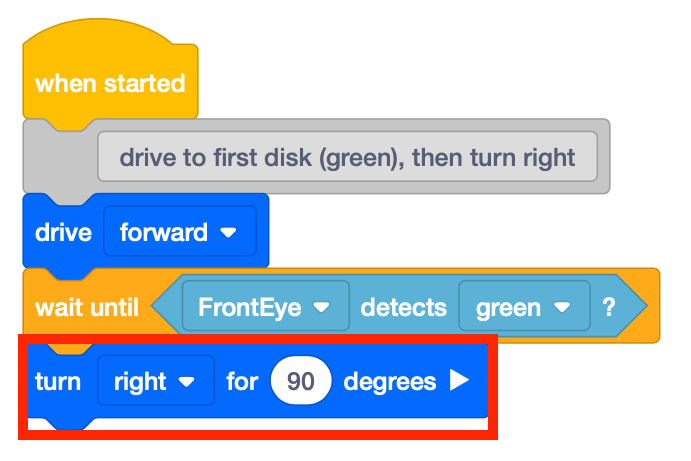
VR 로봇이 녹색 디스크를 감지하면 오른쪽으로 90도 회전하도록 지시하는 [회전] 블록을 추가합니다.
- 아직 열려 있지 않으면 Disk Maze Playground 을 열고 프로젝트를 실행합니다.
-
VR 로봇이 첫 번째 녹색 디스크를 향해 앞으로 주행한 다음 오른쪽으로 회전하는 모습을 지켜보세요.

- VR 로봇은 <Color sensing> 블록의 조건이 TRUE를 보고할 때까지 앞으로 이동합니다. 그런 다음 스택의 다음 블록을 실행하는데, 이는 오른쪽으로 90도 회전하는 것입니다.
이 강의의 나머지 부분을 계속하려면 다음 버튼을 선택하세요.