
บทเรียนที่ 2: ใช้เซนเซอร์ตรวจจับดวงตาด้านหน้ากับ [รอจนกว่า]
ในบทเรียนนี้คุณจะสร้างโครงการโดยใช้เซ็นเซอร์ดวงตาด้านหน้าที่มีบล็อก [รอจนกว่า] เพื่อนำทางหุ่นยนต์ VR ผ่านทาง Disk MazePlayground โครงการของคุณจะสั่งให้หุ่นยนต์ VR เลี้ยวขวาเมื่อตรวจพบดิสก์สีเขียวและเลี้ยวซ้ายเมื่อตรวจพบดิสก์สีน้ำเงินโดยเซ็นเซอร์ดวงตาด้านหน้า ในการท้าทายขนาดเล็กคุณจะใช้ทักษะเหล่านี้เพื่อขับหุ่นยนต์ VR ไปยังแต่ละดิสก์ใน Disk Maze Playground และจบที่ดิสก์สีแดง

ผลการเรียนรู้
- ระบุว่าบล็อก [รอจนกว่า] สามารถใช้กับเซ็นเซอร์ตรวจจับดวงตาได้
ตั้งชื่อและบันทึกโครงการ
โครงการนี้จะใช้บล็อก [รอจนกว่า] เพื่อสั่งให้ VR Robot หมุนเมื่อ Front Eye Sensor ตรวจพบดิสก์สีแรก (สีเขียว) บน Disk MazePlayground

-
เริ่มโครงการใหม่ใน VEXcode VR และตั้งชื่อ โครงการUnit7Lesson2

-
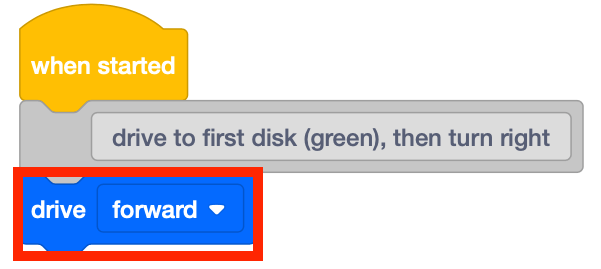
ในการเริ่มต้นหุ่นยนต์ VR จะต้องขับไปยังดิสก์แรกบน Disk MazePlayground ลากบล็อค [Drive] เข้าไปในพื้นที่ทำงาน โปรดทราบว่าคุณสามารถใช้บล็อก VEXcode สลับบล็อกหรือการรวมกันของทั้งสองประเภทบล็อกเพื่อสร้างโปรเจกต์ของคุณได้
-
โครงการตัวอย่างนี้จะใช้บล็อกความคิดเห็นเพื่อเตือนผู้ใช้ว่าเจตนาสำหรับพฤติกรรมของหุ่นยนต์ VR คืออะไรในส่วนต่อไปนี้ของโครงการ

-
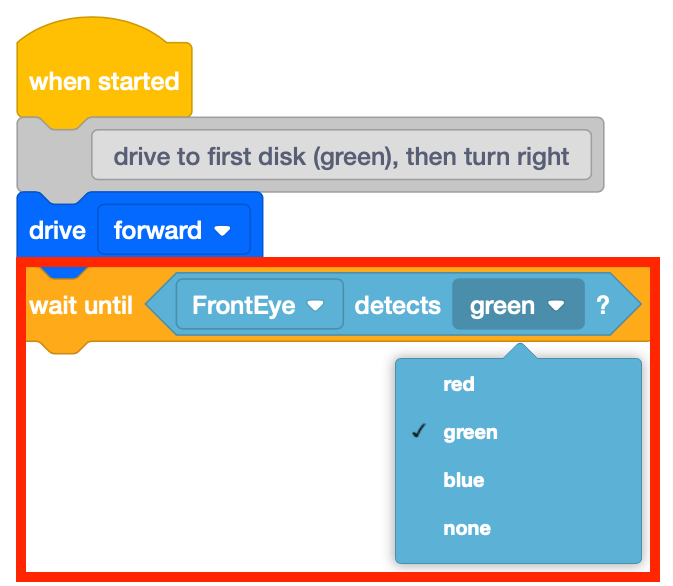
เพิ่มบล็อค [รอจนกว่าจะถึง] และวาง <Color sensing> บล็อคไว้ข้างใน ดิสก์ตัวแรกที่หุ่นยนต์ VR จะพบจะเป็นสีเขียว เลือก ‘สีเขียว’ เป็นสีที่จะตรวจพบ
-
เพิ่มบล็อค [Turn for] เพื่อสั่งให้หุ่นยนต์ VR เลี้ยวขวา 90 องศาเมื่อตรวจพบดิสก์สีเขียว

- เปิด Disk Maze Playground หากยังไม่ได้เปิดและเรียกใช้โครงการ
-
ดูหุ่นยนต์ VR ขับไปข้างหน้าไปยังดิสก์สีเขียวอันแรกแล้วเลี้ยวขวา

- สังเกตว่าหุ่นยนต์ VR ขับเคลื่อนไปข้างหน้าจนกว่าสภาพของ <Color sensing> บล็อกจะรายงานเป็นจริง จากนั้นจะดำเนินการบล็อกถัดไปในกองซ้อนซึ่งจะเลี้ยวขวาเป็นเวลา 90 องศา
เลือกปุ่ม ถัดไป เพื่อดำเนินการกับบทเรียนส่วนที่เหลือนี้ต่อไป