
പാഠം 2: [വരെ കാത്തിരിക്കുക] ഉപയോഗിച്ച് ഫ്രണ്ട് ഐ സെൻസർ ഉപയോഗിക്കുക
ഈ പാഠത്തിൽ, ഡിസ്ക് മേസ് പ്ലേഗ്രൗണ്ട്ലൂടെ VR റോബോട്ടിനെ നാവിഗേറ്റ് ചെയ്യുന്നതിന് [Wait until] ബ്ലോക്ക് ഉപയോഗിച്ച് ഫ്രണ്ട് ഐ സെൻസർ ഉപയോഗിച്ച് നിങ്ങൾ ഒരു പ്രോജക്റ്റ് സൃഷ്ടിക്കും. പച്ച ഡിസ്ക് കണ്ടെത്തുമ്പോൾ വലത്തേക്ക് തിരിയാനും ഫ്രണ്ട് ഐ സെൻസർ നീല ഡിസ്ക് കണ്ടെത്തുമ്പോൾ ഇടത്തേക്ക് തിരിയാനും നിങ്ങളുടെ പ്രോജക്റ്റ് VR റോബോട്ടിനോട് നിർദ്ദേശിക്കും. മിനി ചലഞ്ചിൽ, ഡിസ്ക് മേസ് പ്ലേഗ്രൗണ്ട് ലെ ഓരോ ഡിസ്കിലേക്കും VR റോബോട്ടിനെ ഓടിക്കാൻ നിങ്ങൾ ഈ കഴിവുകൾ പ്രയോഗിക്കുകയും ചുവന്ന ഡിസ്കിൽ പൂർത്തിയാക്കുകയും ചെയ്യും.

പഠന ഫലങ്ങൾ
- [കാത്തിരിക്കുക വരെ] ബ്ലോക്ക് ഐ സെൻസറിനൊപ്പം ഉപയോഗിക്കാൻ കഴിയുമെന്ന് തിരിച്ചറിയുക.
പ്രോജക്റ്റിന് പേര് നൽകി സംരക്ഷിക്കുക
ഡിസ്ക് മേസ് പ്ലേഗ്രൗണ്ട്ലെ ആദ്യത്തെ (പച്ച) നിറമുള്ള ഡിസ്ക് ഫ്രണ്ട് ഐ സെൻസർ കണ്ടെത്തുമ്പോൾ വിആർ റോബോട്ടിനോട് തിരിയാൻ നിർദ്ദേശിക്കുന്നതിന് ഈ പ്രോജക്റ്റ് [വരെ കാത്തിരിക്കുക] ബ്ലോക്ക് ഉപയോഗിക്കും.

-
VEXcode VR-ൽ ഒരു പുതിയ പ്രോജക്റ്റ് ആരംഭിച്ച് പ്രോജക്റ്റിന് എന്ന് പേരിടുക Unit7Lesson2.

-
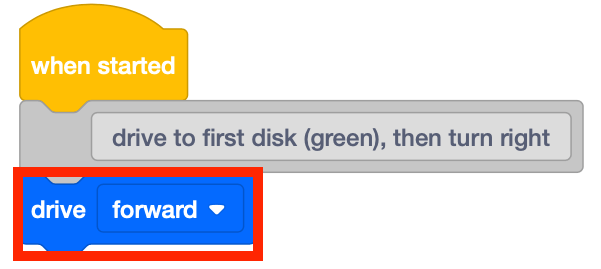
ആരംഭിക്കുന്നതിന്, VR റോബോട്ട് ഡിസ്ക് മെയ്സ് പ്ലേഗ്രൗണ്ട്ലെ ആദ്യത്തെ ഡിസ്കിലേക്ക് ഡ്രൈവ് ചെയ്യേണ്ടതുണ്ട്. [ഡ്രൈവ്] ബ്ലോക്ക് വർക്ക് സ്പെയ്സിലേക്ക് വലിച്ചിടുക. നിങ്ങളുടെ പ്രോജക്റ്റ് നിർമ്മിക്കുന്നതിന് നിങ്ങൾക്ക് VEXcode ബ്ലോക്കുകൾ, സ്വിച്ച് ബ്ലോക്കുകൾ അല്ലെങ്കിൽ രണ്ട് ബ്ലോക്ക് തരങ്ങളുടെയും സംയോജനം ഉപയോഗിക്കാമെന്ന് ഓർമ്മിക്കുക.
-
പ്രോജക്റ്റിന്റെ തുടർന്നുള്ള വിഭാഗത്തിൽ VR റോബോട്ടിന്റെ പെരുമാറ്റരീതികളുടെ ഉദ്ദേശ്യം എന്താണെന്ന് ഉപയോക്താവിനെ ഓർമ്മിപ്പിക്കുന്നതിന് ഈ ഉദാഹരണ പ്രോജക്റ്റ് കമന്റ് ബ്ലോക്കുകൾ ഉപയോഗിക്കും.

-
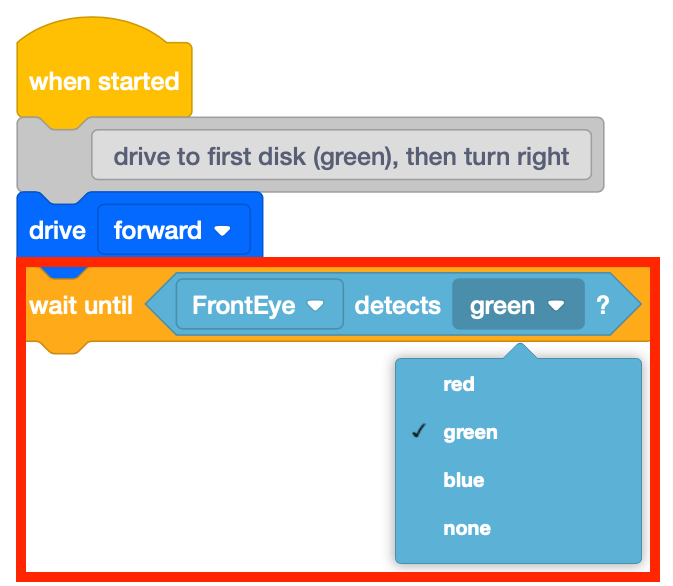
[Wait until] ബ്ലോക്ക് ചേർത്ത് <Color sensing> ബ്ലോക്ക് ഉള്ളിൽ വയ്ക്കുക. വിആർ റോബോട്ട് ആദ്യം നേരിടുന്ന ഡിസ്ക് പച്ചയായിരിക്കും. കണ്ടെത്തേണ്ട നിറമായി 'പച്ച' തിരഞ്ഞെടുക്കുക.
-
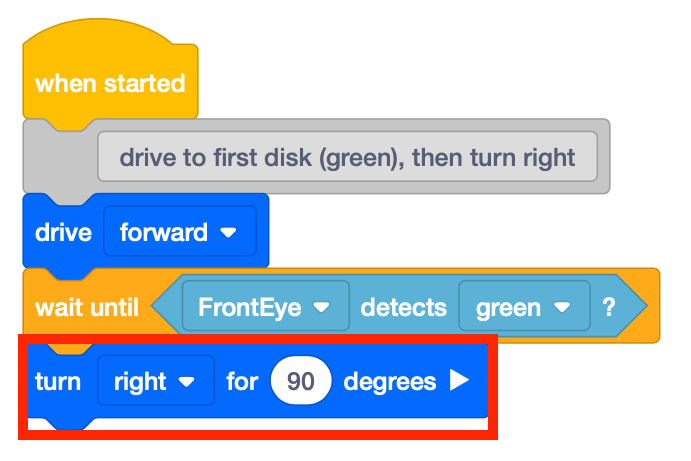
ഒരു പച്ച ഡിസ്ക് കണ്ടെത്തുമ്പോൾ VR റോബോട്ടിനോട് 90 ഡിഗ്രി വലത്തേക്ക് തിരിയാൻ നിർദ്ദേശിക്കാൻ ഒരു [ടേൺ ഫോർ] ബ്ലോക്ക് ചേർക്കുക.
- ഡിസ്ക് മേസ് പ്ലേഗ്രൗണ്ട് തുറന്നിട്ടില്ലെങ്കിൽ അത് തുറന്ന് പ്രോജക്റ്റ് പ്രവർത്തിപ്പിക്കുക.
-
ആദ്യത്തെ പച്ച ഡിസ്കിലേക്ക് VR റോബോട്ട് മുന്നോട്ട് പോകുന്നത് കാണുക, തുടർന്ന് വലത്തേക്ക് തിരിയുക.

- <Color sensing> ബ്ലോക്കിന്റെ അവസ്ഥ ശരിയാണെന്ന് റിപ്പോർട്ട് ചെയ്യുന്നതുവരെ VR റോബോട്ട് മുന്നോട്ട് നീങ്ങുന്നത് ശ്രദ്ധിക്കുക. പിന്നെ, അത് സ്റ്റാക്കിലെ അടുത്ത ബ്ലോക്ക് എക്സിക്യൂട്ട് ചെയ്യുന്നു, അതായത് 90 ഡിഗ്രി വലത്തേക്ക് തിരിയുക.
ഈ പാഠത്തിന്റെ ബാക്കി ഭാഗം തുടരാൻ അടുത്തത് ബട്ടൺ തിരഞ്ഞെടുക്കുക.