
Lektion 2: Verwenden des Vorderaugensensors mit [Warten bis]
In dieser Lektion erstellen Sie ein Projekt mit dem Front Eye Sensor mit dem Block [Warten bis], um den VR-Roboter durch den Disk Maze Playground zu navigieren. Ihr Projekt weist den VR-Roboter an, sich nach rechts zu drehen, wenn eine grüne Scheibe erkannt wird, und nach links, wenn eine blaue Scheibe vom Front Eye Sensor erkannt wird. In der Mini-Challenge wendest du diese Fähigkeiten an, um den VR-Roboter auf jede Festplatte im Disk Maze Playground zu fahren und auf der roten Festplatte zu beenden.

Lernergebnisse
- Stellen Sie sicher, dass der Block [Warten bis] mit dem Augensensor verwendet werden kann.
Projekt benennen und speichern
Dieses Projekt verwendet den Block [Warten bis], um den VR-Roboter anzuweisen, sich zu drehen, wenn der Front Eye Sensor die erste (grüne) farbige Festplatte auf dem Disk Maze Playground erkennt.

-
Starten Sie ein neues Projekt in VEXcode VR und benennen Sie das Projekt Unit7Lesson2.

-
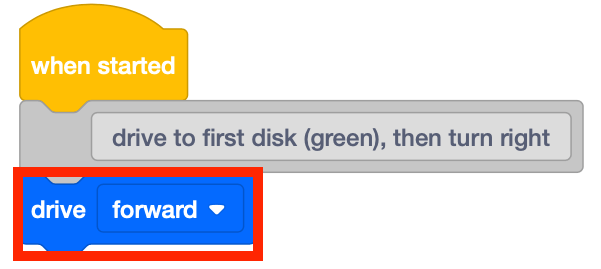
Zu Beginn muss der VR-Roboter zur ersten Festplatte auf dem Disk Maze Playground fahren. Ziehen Sie den [Drive] -Block in den Arbeitsbereich. Denken Sie daran, dass Sie VEXcode-Blöcke, Switch-Blöcke oder eine Kombination aus beiden Blocktypen verwenden können, um Ihr Projekt zu erstellen.
-
Dieses Beispielprojekt verwendet Kommentarblöcke, um den Benutzer daran zu erinnern, was die Absicht für das Verhalten des VR-Roboters im folgenden Abschnitt des Projekts ist.

-
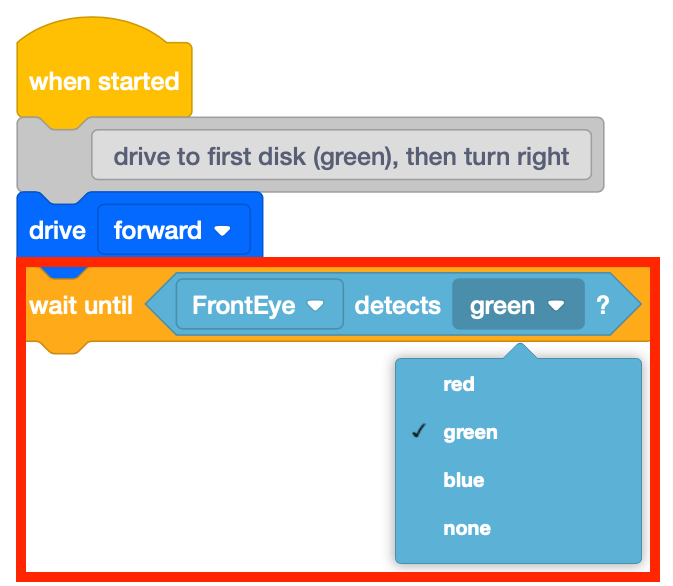
Fügen Sie den Block [Warten bis] hinzu und platzieren Sie den <Color sensing> Block darin. Die erste Festplatte, auf die der VR-Roboter trifft, ist grün. Wählen Sie "Grün" als die Farbe, die erkannt werden soll.
-
Fügen Sie einen [Drehen für] -Block hinzu, um den VR-Roboter anzuweisen, sich um 90 Grad nach rechts zu drehen, wenn er eine grüne Scheibe erkennt.

- Öffnen Sie den Disk Maze Playground , wenn er noch nicht geöffnet ist, und führen Sie das Projekt aus.
-
Beobachten Sie, wie der VR-Roboter vorwärts zur ersten grünen Scheibe fährt und dann nach rechts abbiegt.

- Beachten Sie, dass der VR-Roboter vorwärts fährt, bis der Zustand des <Color sensing> Blocks als WAHR gemeldet wird. Dann führt es den nächsten Block im Stapel aus, der um 90 Grad nach rechts abbiegen soll.
Wählen Sie die Schaltfläche Weiter um mit dem Rest dieser Lektion fortzufahren.