
पाठ 2: कंप्यूटर विज्ञान की बुनियादी बातें
इस पाठ में, आप कंप्यूटर विज्ञान के मूल सिद्धांतों के बारे में जानेंगे, जिनमें शामिल हैं:
- प्रोग्रामिंग भाषा क्या है?
- रोबोट का व्यवहार कैसा है?
- रोबोट के व्यवहार को कैसे संशोधित करें?
इस पाठ के अंत में, आप 6-अक्ष रोबोटिक भुजा के व्यवहारों की पहचान करने के लिए सीखे गए कौशल को लागू करेंगे, जैसे कि नीचे दिए गए वीडियो में देखा गया है, साथ ही प्रत्येक व्यवहार के अनुरूप VEXcode ब्लॉक भी। नीचे दिए गए वीडियो क्लिप में, 6-एक्सिस आर्म सुरक्षित स्थिति से शुरू होता है, फिर टाइल स्थान 32 को छूने के लिए आगे बढ़ता है। इसके बाद यह टाइल के साथ आगे बढ़ता है और टाइल के निचले दाएं कोने में टाइल स्थान 36 और 36 पर रुकता है। इसके बाद 6-अक्षीय भुजा सिग्नल टॉवर की ओर बढ़ती है, टाइल स्थान 24 पर रुकती है, तथा सिग्नल टॉवर के बगल में टाइल स्थान 12 पर रुकती है, जो परियोजना के चलने के दौरान हरे रंग में चमक रहा होता है।
प्रोग्रामिंग भाषाओं को समझना
प्रोग्रामिंग भाषा नियमों का एक समूह है जिसमें प्रतीक क्रियाओं का प्रतिनिधित्व करते हैं। प्रोग्रामिंग भाषाएं चरण-दर-चरण निर्देशों का पालन करती हैं जिन्हें कंप्यूटर किसी परियोजना को चलाने के लिए निष्पादित करता है।
VEXcode 6-एक्सिस आर्म के लिए प्रोग्रामिंग भाषा है।
रोबोट व्यवहार
व्यवहाररोबोट द्वारा की गई या की जाने वाली क्रियाएं हैं। अक्ष पर ऊपर-नीचे चलना, रुकना, तथा सिग्नल टॉवर पर लगी लाइटों को चालू या बंद करना - ये सभी व्यवहार हैं। व्यवहार प्रोग्रामिंग भाषा द्वारा परिभाषित किये जाते हैं।
6-अक्ष आर्म के व्यवहार को बदलने के लिए, आप किसी प्रोजेक्ट में ब्लॉक बदल सकते हैं। इन प्रोग्रामिंग ब्लॉकों कोकमांडभी कहा जाता है। आपने पिछले पाठ में गतिविधि में सिग्नल टॉवर की लाइटों का रंग बदलते समय कमांड संपादित किए थे।
आप VEXcode के बाईं ओर स्थित टूलबॉक्स में 6-एक्सिस आर्म और सिग्नल टॉवर के साथ उपयोग करने के लिए उपलब्ध सभी ब्लॉक पा सकते हैं।
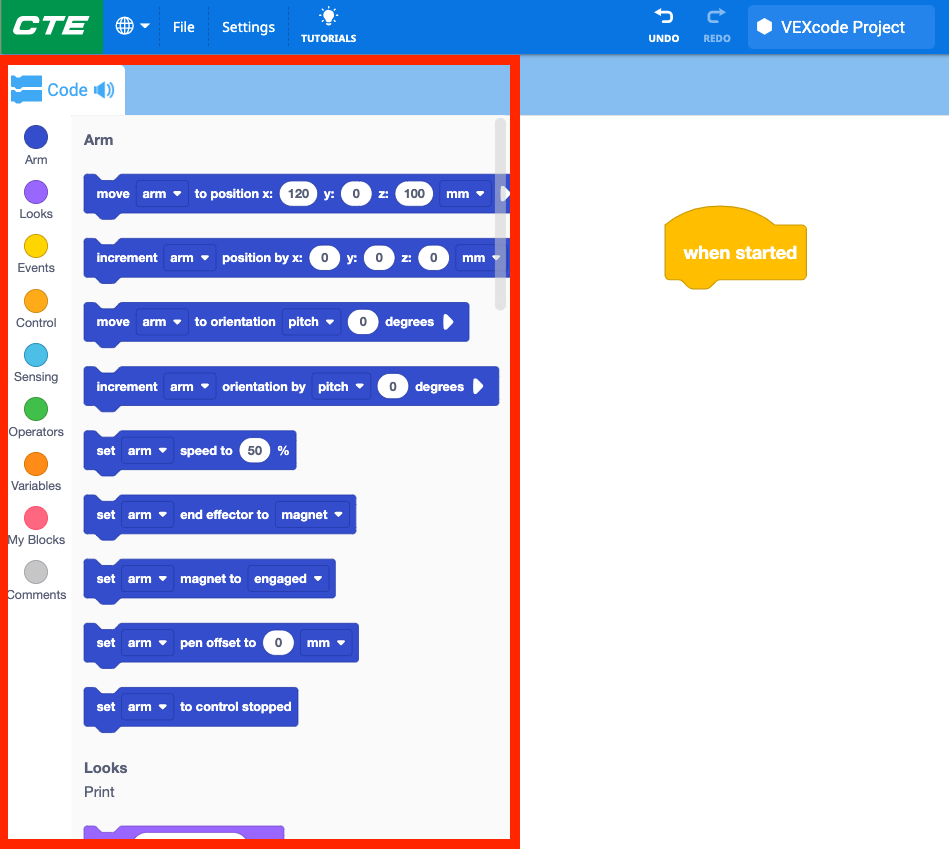
आप टूलबॉक्स में स्क्रॉल करके कमांड की पूरी सूची तक पहुंच सकते हैं, जैसा कि इस वीडियो में दिखाया गया है। वीडियो क्लिप में, टूलबॉक्स को स्क्रॉल करके प्रोजेक्ट में उपयोग के लिए उपलब्ध विभिन्न कमांड्स को दिखाया गया है।
आपकी जानकारी के लिए
आप सहायता खोलकर किसी भी ब्लॉक के बारे में अधिक जानकारी प्राप्त कर सकते हैं। सहायता में बताया गया है कि ब्लॉक क्या करता है और किसी परियोजना में इसका उपयोग कैसे किया जाता है। सहायता विंडो खोलने के लिए, सहायता आइकन का चयन करें, फिर उस ब्लॉक का चयन करें जिसके बारे में आप अधिक जानना चाहते हैं, जैसा कि नीचे दिए गए वीडियो में दिखाया गया है। इस वीडियो क्लिप में, VEXcode के दाईं ओर स्थित प्रश्न चिह्न सहायता आइकन का चयन किया जाता है, तो सहायता विंडो खुल जाती है। इसके बाद, प्रोजेक्ट में सेट सिग्नल टावर ब्लॉक का चयन किया जाता है और उस ब्लॉक के लिए सहायता जानकारी दिखाई जाती है।
रोबोट व्यवहार में संशोधन
किसी प्रोजेक्ट में ब्लॉक या कमांड बदलने से रोबोट का व्यवहार बदल जाएगा। किसी प्रोजेक्ट में पैरामीटर्स को संशोधित करना, ब्लॉक्स को जोड़ना, हटाना या व्यवस्थित करना, ये सभी रोबोट के व्यवहार को संशोधित करेंगे।
पैरामीटर बदलना
स्थिति पर जाएँ ब्लॉक के मापदंडों में (x, y, z) निर्देशांक उस विशेष निर्देशांक पर जाने के व्यवहार का कारण बनते हैं। ब्लॉक में पैरामीटर्स को संशोधित करने से 6-एक्सिस आर्म को एक अलग स्थान पर ले जाकर रोबोट का व्यवहार बदल जाता है।
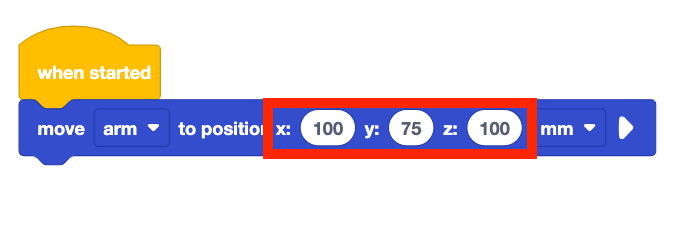
उदाहरण के लिए, इस परियोजना में, 6-अक्ष भुजा का व्यवहार निर्देशांक (100, 50, 100) की ओर बढ़ना है।
ब्लॉक में पैरामीटर बदलने से 6-अक्ष भुजा निर्देशांक (150, 150, 200) पर चली जाएगी। यह पिछले आदेश से भिन्न व्यवहार है, क्योंकि 6-अक्ष भुजा भिन्न स्थान पर चली जाती है।
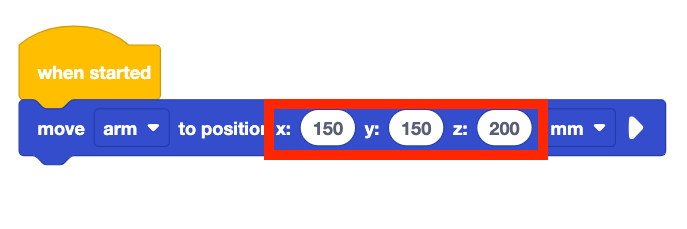
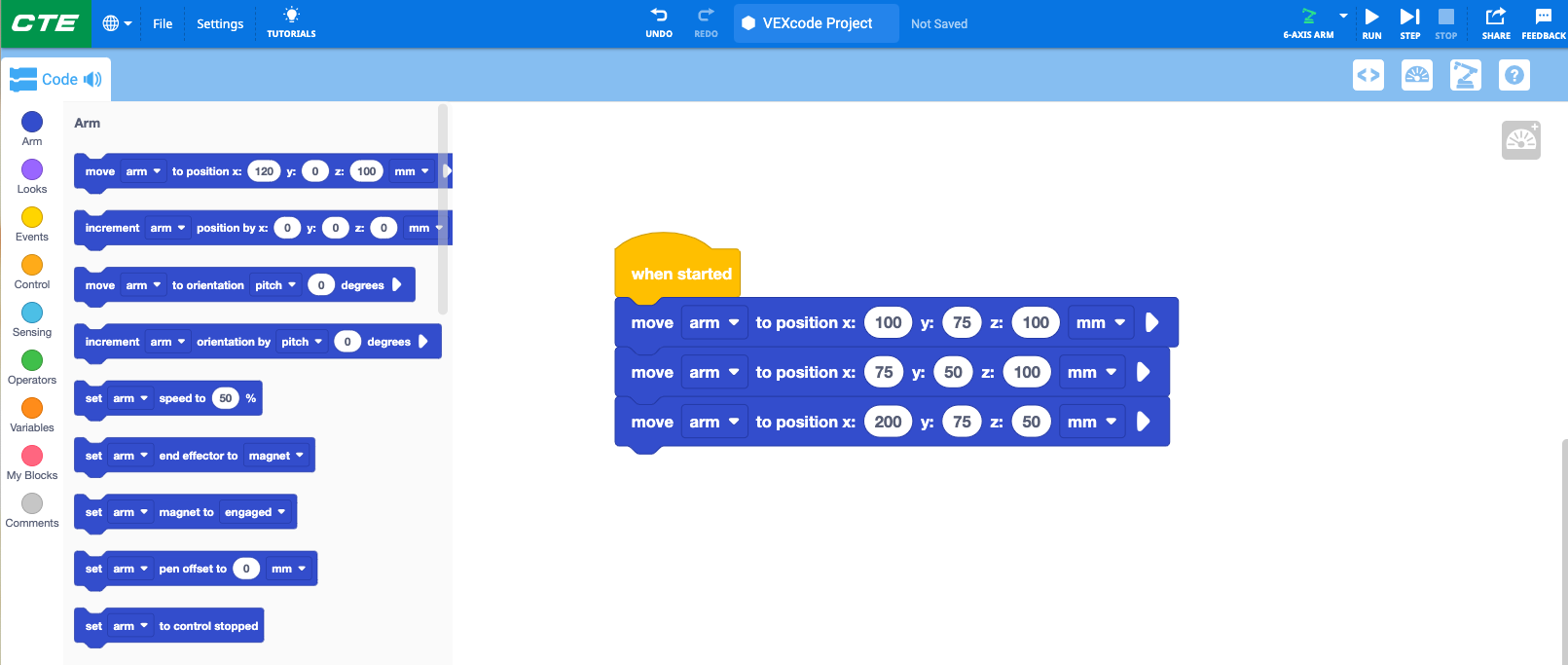
नीचे दिए गए वीडियो में, दाईं ओर दिखाया गया प्रोजेक्ट, प्रोजेक्ट चलाने पर 6-अक्ष भुजा को निर्देशांक (100, 75, 100) पर ले जाएगा। 6-अक्ष भुजा सुरक्षित स्थिति से शुरू होती है, फिर उस निर्देशांक पर पहुंच जाती है, और परियोजना रुक जाती है। स्थिति ब्लॉक के पैरामीटर्स को फिर (150, 150, 200) में बदल दिया जाता है। जब परियोजना को दूसरी बार चलाया जाता है, तो 6-अक्षीय भुजा नए स्थान पर चली जाती है।
आपकी जानकारी के लिए
जैसा कि ऊपर बताया गया है, कमांड VEXcode EXP में प्रोग्रामिंग ब्लॉक हैं जिनका उपयोग 6-एक्सिस आर्म के व्यवहार को नियंत्रित करने के लिए किया जाता है।

पैरामीटर प्रत्येक कमांड का विवरण हैं। इनमें ड्रॉप डाउन या अन्य इनपुट शामिल हो सकते हैं। यहां दिखाए गए ब्लॉक में कई पैरामीटर हैं। एक, कनेक्ट करने के लिए डिवाइस चुनने के लिए, एक प्रत्येक अक्ष निर्देशांक के लिए, और एक इकाई (मिलीमीटर या इंच) निर्धारित करने के लिए।

ब्लॉकों को पुनर्व्यवस्थित करना
स्टैक में ब्लॉक ऊपर से नीचे की ओर चलते हैं, तथा प्रत्येक व्यवहार उसी क्रम में करते हैं।
ब्लॉकों को पुनः व्यवस्थित करने से रोबोट का व्यवहार बदल जाएगा, यह व्यवहार को भिन्न क्रम में निष्पादित करता है।
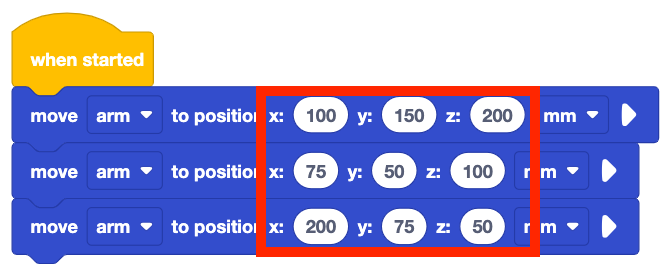
इस उदाहरण में, 6-अक्ष भुजा एक विशिष्ट क्रम में तीन निर्देशांकों पर जाएगी:
- (100, 150, 200)
- (75, 50, 100)
- (200, 75, 50)
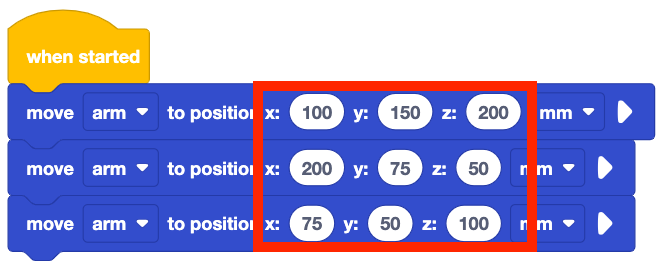
ब्लॉकों को पुनः व्यवस्थित करने के लिए उन्हें खींचकर, कमांडों को एक अलग क्रम में रखा जाता है। 6-अक्ष भुजा का व्यवहार बदल जाएगा, क्योंकि अब यह इस क्रम में निर्देशांकों की ओर बढ़ेगा:
- (100, 150, 200)
- (200, 75, 50)
- (75, 50, 100)
नीचे दिए गए वीडियो में, जब परियोजना चलाई जाती है तो 6-अक्ष भुजा एक विशिष्ट क्रम में तीन निर्देशांकों पर जाती है, जैसा कि ऊपर की परियोजना में दिखाया गया है। परियोजना को रोक दिया जाता है, और फिर ब्लॉकों को पुनः व्यवस्थित किया जाता है, ताकि तीसरे ब्लॉक को पहले दो के बीच ले जाया जा सके। जब परियोजना को पुनः चलाया जाता है, तो 6-अक्ष भुजा का व्यवहार बदल जाता है, क्योंकि यह नये क्रम में निर्देशांकों की ओर बढ़ता है।
गतिविधि
अब जब आपने रोबोट के व्यवहार और VEXcode में विशिष्ट कमांडों के साथ उनके व्यवहार के संबंध के बारे में जान लिया है, तो आप नीचे दिए गए वीडियो में 6-एक्सिस आर्म के विभिन्न व्यवहारों की पहचान करके और उन्हें ब्लॉकों के समतुल्य करने का प्रयास करके इन कौशलों का अभ्यास कर सकते हैं। नीचे दिए गए वीडियो क्लिप में, 6-एक्सिस आर्म सुरक्षित स्थिति से शुरू होता है, फिर टाइल स्थान 32 पर चला जाता है। इसके बाद यह टाइल पर वर्गों की निचली पंक्ति के साथ नीचे दाएं कोने की ओर बढ़ता है, फिर वर्गों की दाईं ओर की पंक्ति के साथ सिग्नल टॉवर की ओर ऊपर की ओर बढ़ता है।
- 6-एक्सिस आर्म का यह वीडियो देखकर शुरुआत करें।
- 6-एक्सिस आर्म और सिग्नल टॉवर द्वारा किए जा रहे सभी व्यवहारों की पहचान करें। इन्हें अपनी इंजीनियरिंग नोटबुक में रिकॉर्ड करें।
- अपने व्यवहार की सूची की तुलना अपने समूह के सदस्यों से करें। आपके कौन से व्यवहार एक दूसरे से समान या भिन्न हैं?
- अपने व्यवहार की सूची की तुलना VEXcode में ब्लॉकों के साथ करें। आपके द्वारा पहचाने गए प्रत्येक व्यवहार के साथ कौन सी रुकावटें आती हैं? इन्हें अपनी इंजीनियरिंग नोटबुक में रिकॉर्ड करें।
अपनी समझ की जाँच करें
अगला पाठ शुरू करने से पहले, सुनिश्चित करें कि आप अपनी इंजीनियरिंग नोटबुक में नीचे दिए गए दस्तावेज़ में दिए गए प्रश्नों के उत्तर देकर इस पाठ की अवधारणाओं को समझते हैं।
अपनी समझ की जाँच करें प्रश्न > (Google Doc / .docx / .pdf)
6-अक्ष भुजा को x-अक्ष के साथ गति करने के लिए कोड करने के तरीके के बारे में जानने के लिए अगला > का चयन करें।