
പാഠം 2: കമ്പ്യൂട്ടർ സയൻസ് അടിസ്ഥാനകാര്യങ്ങൾ
ഈ പാഠത്തിൽ, കമ്പ്യൂട്ടർ സയൻസിന്റെ അടിസ്ഥാനകാര്യങ്ങളെക്കുറിച്ച് നിങ്ങൾ പഠിക്കും, അവയിൽ ചിലത് ഇവയാണ്:
- എന്താണ് ഒരു പ്രോഗ്രാമിംഗ് ഭാഷ.
- എന്തൊരു റോബോട്ട് പെരുമാറ്റം.
- റോബോട്ട് സ്വഭാവരീതികൾ എങ്ങനെ പരിഷ്കരിക്കാം.
ഈ പാഠത്തിന്റെ അവസാനം, താഴെയുള്ള വീഡിയോയിൽ കാണുന്നതുപോലുള്ള 6-ആക്സിസ് റോബോട്ടിക് ആമിന്റെ സ്വഭാവരീതികളും ഓരോ സ്വഭാവത്തിനും അനുയോജ്യമായ VEXcode ബ്ലോക്കുകളും തിരിച്ചറിയാൻ നിങ്ങൾ പഠിച്ച കഴിവുകൾ പ്രയോഗിക്കും. താഴെയുള്ള വീഡിയോ ക്ലിപ്പിൽ, 6-ആക്സിസ് ആം സുരക്ഷിത സ്ഥാനത്ത് നിന്ന് ആരംഭിച്ച്, തുടർന്ന് ടൈൽ ലൊക്കേഷൻ 32-ൽ സ്പർശിക്കുന്നതിലേക്ക് നീങ്ങുന്നു. പിന്നീട് അത് ടൈലിനൊപ്പം നീങ്ങുകയും ടൈലിന്റെ താഴെ വലത് കോണിലുള്ള ടൈൽ ലൊക്കേഷനുകൾ 36, 36 എന്നിവയിൽ താൽക്കാലികമായി നിർത്തുകയും ചെയ്യുന്നു. തുടർന്ന് 6-ആക്സിസ് ആം സിഗ്നൽ ടവറിലേക്ക് നീങ്ങുന്നു, ടൈൽ ലൊക്കേഷൻ 24-ൽ നിർത്തി, പ്രോജക്റ്റ് നടക്കുമ്പോൾ പച്ചയായി മിന്നിമറയുന്ന സിഗ്നൽ ടവറിനടുത്തുള്ള ടൈൽ ലൊക്കേഷൻ 12-ൽ നിർത്തുന്നു.
പ്രോഗ്രാമിംഗ് ഭാഷകൾ മനസ്സിലാക്കൽ
ഒരു പ്രോഗ്രാമിംഗ് ഭാഷ എന്നത് ചിഹ്നങ്ങൾ പ്രവർത്തനങ്ങളെ പ്രതിനിധീകരിക്കുന്ന നിയമങ്ങളുടെ ഒരു കൂട്ടമാണ്. ഒരു പ്രോജക്റ്റ് പ്രവർത്തിപ്പിക്കുന്നതിന് കമ്പ്യൂട്ടർ നടപ്പിലാക്കുന്ന ഘട്ടം ഘട്ടമായുള്ള നിർദ്ദേശങ്ങൾ പ്രോഗ്രാമിംഗ് ഭാഷകൾ പിന്തുടരുന്നു.
6-ആക്സിസ് ആമിന്റെ പ്രോഗ്രാമിംഗ് ഭാഷയാണ് VEXcode.
റോബോട്ടുകളുടെ പെരുമാറ്റരീതികൾ
പെരുമാറ്റങ്ങൾഎന്നത് ഒരു റോബോട്ട് ചെയ്യുന്നതോ ചെയ്യേണ്ടതോ ആയ പ്രവൃത്തികളാണ്. ഒരു അച്ചുതണ്ടിലൂടെ മുകളിലേക്കും താഴേക്കും നീങ്ങുക, നിർത്തുക, സിഗ്നൽ ടവറിലെ ലൈറ്റുകൾ ഓണാക്കുകയോ ഓഫാക്കുകയോ ചെയ്യുക - ഇവയെല്ലാം പെരുമാറ്റരീതികളാണ്. പെരുമാറ്റരീതികൾ പ്രോഗ്രാമിംഗ് ഭാഷ നിർവചിക്കുന്നു.
6-ആക്സിസ് ആമിന്റെ സ്വഭാവരീതികൾ മാറ്റാൻ, ഒരു പ്രോജക്റ്റിലെ ബ്ലോക്കുകൾ നിങ്ങൾക്ക് മാറ്റാൻ കഴിയും. ഈ പ്രോഗ്രാമിംഗ് ബ്ലോക്കുകളെകമാൻഡുകൾഎന്നും വിളിക്കുന്നു. പ്രവർത്തനത്തിൽ സിഗ്നൽ ടവറിന്റെ ലൈറ്റുകളുടെ നിറം മാറ്റിയപ്പോൾ, മുൻ പാഠത്തിലെ കമാൻഡുകൾ നിങ്ങൾ എഡിറ്റ് ചെയ്തു.
VEXcode-ന്റെ ഇടതുവശത്തുള്ള ടൂൾബോക്സിൽ 6-ആക്സിസ് ആം, സിഗ്നൽ ടവർ എന്നിവയ്ക്കൊപ്പം ഉപയോഗിക്കാൻ ലഭ്യമായ എല്ലാ ബ്ലോക്കുകളും നിങ്ങൾക്ക് കണ്ടെത്താൻ കഴിയും.
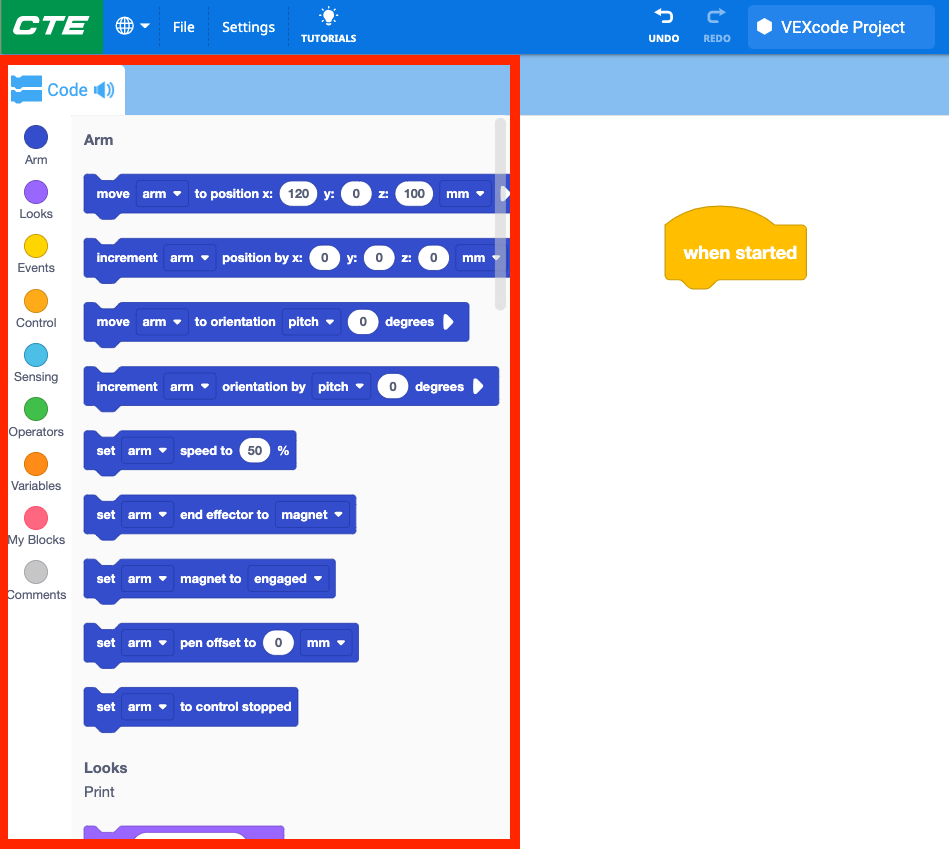
ഈ വീഡിയോയിൽ കാണിച്ചിരിക്കുന്നതുപോലെ, ടൂൾബോക്സിലൂടെ സ്ക്രോൾ ചെയ്തുകൊണ്ട് നിങ്ങൾക്ക് കമാൻഡുകളുടെ പൂർണ്ണ പട്ടികയിലേക്ക് പ്രവേശിക്കാൻ കഴിയും. വീഡിയോ ക്ലിപ്പിൽ, ഒരു പ്രോജക്റ്റിൽ ഉപയോഗിക്കാൻ ലഭ്യമായ വ്യത്യസ്ത കമാൻഡുകൾ കാണിക്കുന്നതിനായി ടൂൾബോക്സ് സ്ക്രോൾ ചെയ്യുന്നു.
നിങ്ങളുടെ അറിവിലേക്കായി
സഹായം തുറന്ന് ഏത് ബ്ലോക്കുകളെക്കുറിച്ചും കൂടുതലറിയാൻ കഴിയും. ഒരു ബ്ലോക്ക് എന്താണ് ചെയ്യുന്നതെന്നും ഒരു പ്രോജക്റ്റിൽ അത് എങ്ങനെ ഉപയോഗിക്കാമെന്നും സഹായം വിശദീകരിക്കുന്നു. സഹായ വിൻഡോ തുറക്കാൻ, സഹായ ഐക്കൺ തിരഞ്ഞെടുക്കുക, തുടർന്ന് താഴെയുള്ള വീഡിയോയിൽ കാണിച്ചിരിക്കുന്നതുപോലെ നിങ്ങൾക്ക് കൂടുതലറിയാൻ ആഗ്രഹിക്കുന്ന ബ്ലോക്ക് തിരഞ്ഞെടുക്കുക. ഈ വീഡിയോ ക്ലിപ്പിൽ, VEXcode ന്റെ വലതുവശത്തുള്ള ചോദ്യചിഹ്ന സഹായ ഐക്കൺ തിരഞ്ഞെടുത്തു, തുടർന്ന് സഹായ വിൻഡോ തുറക്കുന്നു. അടുത്തതായി, പ്രോജക്റ്റിലെ Set signal tower ബ്ലോക്ക് തിരഞ്ഞെടുക്കുകയും ആ ബ്ലോക്കിനായുള്ള സഹായ വിവരങ്ങൾ കാണിക്കുകയും ചെയ്യുന്നു.
റോബോട്ടുകളുടെ പെരുമാറ്റരീതികൾ പരിഷ്കരിക്കുന്നു
ഒരു പ്രോജക്റ്റിലെ ബ്ലോക്കുകൾ അല്ലെങ്കിൽ കമാൻഡുകൾ മാറ്റുന്നത് റോബോട്ടിന്റെ സ്വഭാവത്തെ മാറ്റും. ഒരു പ്രോജക്റ്റിലെ പാരാമീറ്ററുകൾ പരിഷ്കരിക്കുക, ചേർക്കുക, ഇല്ലാതാക്കുക അല്ലെങ്കിൽ ബ്ലോക്കുകൾ ക്രമീകരിക്കുക എന്നിവയെല്ലാം റോബോട്ടിന്റെ സ്വഭാവരീതികളിൽ മാറ്റം വരുത്തും.
പാരാമീറ്ററുകൾ മാറ്റുന്നു
ന്റെ പാരാമീറ്ററുകളിലെ (x, y, z) കോർഡിനേറ്റുകൾ സ്ഥാനത്തേക്ക് നീങ്ങുന്ന ബ്ലോക്കിന് ആ പ്രത്യേക കോർഡിനേറ്റിലേക്ക് നീങ്ങുന്ന സ്വഭാവത്തിന് കാരണമാകുന്നു. ബ്ലോക്കിലെ പാരാമീറ്ററുകൾ പരിഷ്കരിക്കുന്നതിലൂടെ 6-ആക്സിസ് ആം മറ്റൊരു സ്ഥലത്തേക്ക് മാറ്റുന്നതിലൂടെ റോബോട്ടിന്റെ സ്വഭാവം മാറുന്നു.
ഉദാഹരണത്തിന്, ഈ പ്രോജക്റ്റിൽ, 6-ആക്സിസ് ആം ന്റെ സ്വഭാവം കോർഡിനേറ്റിലേക്ക് (100, 50, 100) നീങ്ങുക എന്നതാണ്.

ബ്ലോക്കിലെ പാരാമീറ്ററുകൾ മാറ്റുന്നത് 6-ആക്സിസ് ആം കോർഡിനേറ്റിലേക്ക് (150, 150, 200) നീക്കും. 6-ആക്സിസ് ആം മറ്റൊരു സ്ഥലത്തേക്ക് നീങ്ങുമ്പോൾ, അത് മുമ്പത്തെ കമാൻഡിൽ നിന്ന് വ്യത്യസ്തമായ ഒരു പെരുമാറ്റമാണ്.

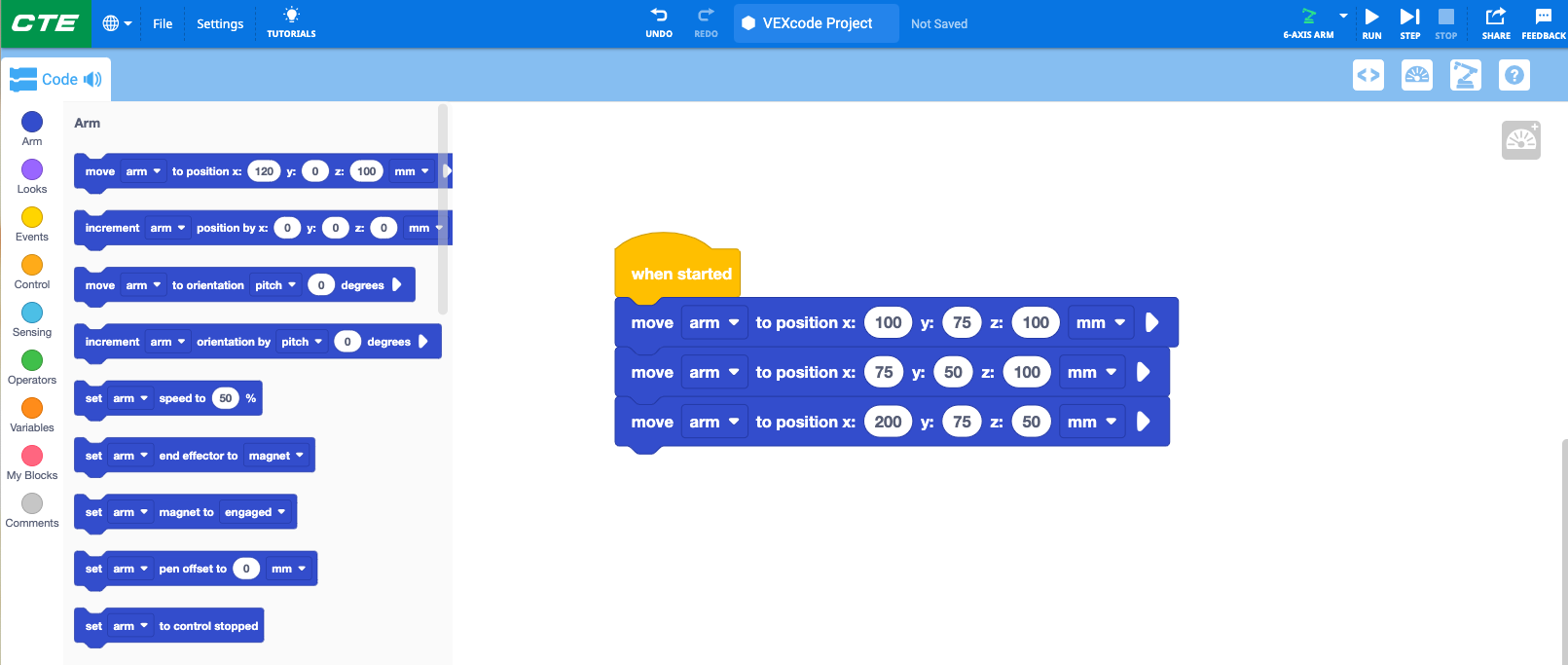
താഴെയുള്ള വീഡിയോയിൽ, വലതുവശത്ത് കാണിച്ചിരിക്കുന്ന പ്രോജക്റ്റ്, പ്രോജക്റ്റ് പ്രവർത്തിപ്പിക്കുമ്പോൾ 6-ആക്സിസ് ആം കോർഡിനേറ്റിലേക്ക് (100, 75, 100) നീക്കാൻ ആഗ്രഹിക്കുന്നു. 6-ആക്സിസ് ആം സുരക്ഷിത സ്ഥാനത്ത് നിന്ന് ആരംഭിച്ച്, ആ കോർഡിനേറ്റിലേക്ക് നീങ്ങുകയും, പ്രോജക്റ്റ് നിർത്തുകയും ചെയ്യുന്നു. Move to position ബ്ലോക്കിന്റെ പാരാമീറ്ററുകൾ പിന്നീട് (150, 150, 200) ആയി മാറ്റുന്നു. പ്രോജക്റ്റ് രണ്ടാമതും പ്രവർത്തിപ്പിക്കുമ്പോൾ, 6-ആക്സിസ് ആം പുതിയ സ്ഥലത്തേക്ക് നീങ്ങുന്നു.
നിങ്ങളുടെ അറിവിലേക്കായി
മുകളിൽ സൂചിപ്പിച്ചതുപോലെ, 6-ആക്സിസ് ആമിന്റെ സ്വഭാവരീതികൾ നിയന്ത്രിക്കാൻ ഉപയോഗിക്കുന്ന VEXcode EXP-ലെ പ്രോഗ്രാമിംഗ് ബ്ലോക്കുകളാണ് കമാൻഡുകൾ.

ഓരോ കമാൻഡിന്റെയും വിശദാംശങ്ങളാണ് പാരാമീറ്ററുകൾ. ഇവയിൽ ഡ്രോപ്പ് ഡൗണുകളോ മറ്റ് ഇൻപുട്ടുകളോ ഉൾപ്പെടാം. ഇവിടെ കാണിച്ചിരിക്കുന്ന ബ്ലോക്കിൽ, നിരവധി പാരാമീറ്ററുകൾ ഉണ്ട്. കണക്റ്റുചെയ്യേണ്ട ഉപകരണം തിരഞ്ഞെടുക്കാൻ ഒന്ന്, അച്ചുതണ്ടിന്റെ ഓരോ കോർഡിനേറ്റുകൾക്കും ഒന്ന്, യൂണിറ്റുകൾ (മില്ലീമീറ്ററോ ഇഞ്ചോ) നിർണ്ണയിക്കാൻ ഒന്ന്.

ബ്ലോക്കുകൾ പുനഃക്രമീകരിക്കുന്നു
ഒരു സ്റ്റാക്കിലെ ബ്ലോക്കുകൾ മുകളിൽ നിന്ന് താഴേക്ക് പ്രവർത്തിക്കുന്നു, ഓരോ സ്വഭാവവും ആ ക്രമത്തിൽ ചെയ്യുന്നു.
ബ്ലോക്കുകൾ പുനഃക്രമീകരിക്കുന്നത് റോബോട്ടിന്റെ പെരുമാറ്റം മാറ്റും, അത് വ്യത്യസ്തമായ ക്രമത്തിൽ പെരുമാറ്റങ്ങൾ നിർവ്വഹിക്കും.
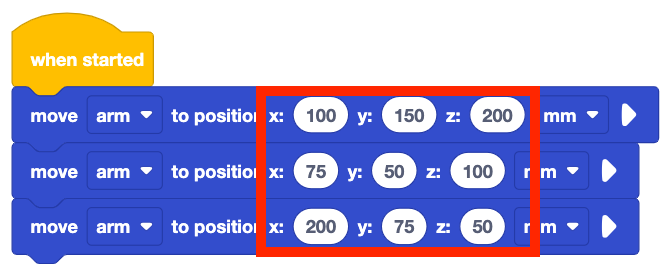
ഈ ഉദാഹരണത്തിൽ, 6-ആക്സിസ് ഭുജം ഒരു പ്രത്യേക ക്രമത്തിൽ മൂന്ന് കോർഡിനേറ്റുകളിലേക്ക് നീങ്ങും:
- (100, 150, 200)
- (75, 50, 100)
- (200, 75, 50)
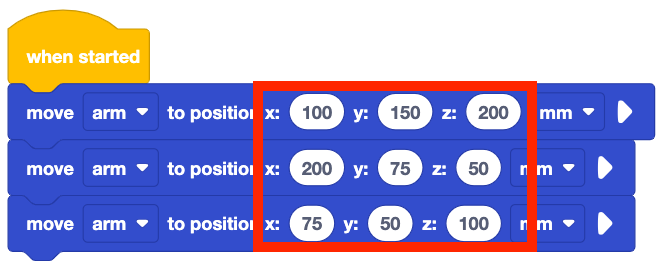
ബ്ലോക്കുകൾ വലിച്ചിട്ട് പുനഃക്രമീകരിക്കുന്നതിലൂടെ, കമാൻഡുകൾ മറ്റൊരു ക്രമത്തിൽ സ്ഥാപിക്കപ്പെടുന്നു. 6-ആക്സിസ് ഭുജത്തിന്റെ സ്വഭാവങ്ങൾ മാറും, കാരണം അത് ഇപ്പോൾ ഈ ക്രമത്തിൽ കോർഡിനേറ്റുകളിലേക്ക് നീങ്ങും:
- (100, 150, 200)
- (200, 75, 50)
- (75, 50, 100)
താഴെയുള്ള വീഡിയോയിൽ, മുകളിലുള്ള പ്രോജക്റ്റിൽ കാണിച്ചിരിക്കുന്നതുപോലെ, പ്രോജക്റ്റ് പ്രവർത്തിപ്പിക്കുമ്പോൾ 6-ആക്സിസ് ആം മൂന്ന് കോർഡിനേറ്റുകളിലേക്ക് ഒരു പ്രത്യേക ക്രമത്തിൽ നീങ്ങുന്നു. പദ്ധതി നിർത്തിവയ്ക്കുകയും, ആദ്യത്തെ രണ്ടെണ്ണത്തിനിടയിൽ മൂന്നാമത്തെ ബ്ലോക്ക് നീക്കുന്നതിനായി ബ്ലോക്കുകൾ പുനഃക്രമീകരിക്കുകയും ചെയ്യുന്നു. പ്രോജക്റ്റ് വീണ്ടും പ്രവർത്തിപ്പിക്കുമ്പോൾ, പുതിയ ക്രമത്തിൽ കോർഡിനേറ്റുകളിലേക്ക് നീങ്ങുമ്പോൾ, 6-ആക്സിസ് ആം ന്റെ സ്വഭാവം മാറുന്നു.
പ്രവർത്തനം
റോബോട്ട് സ്വഭാവരീതികളെക്കുറിച്ചും VEXcode-ലെ നിർദ്ദിഷ്ട കമാൻഡുകളുമായി പെരുമാറ്റങ്ങൾ എങ്ങനെ ബന്ധപ്പെട്ടിരിക്കുന്നുവെന്നും ഇപ്പോൾ നിങ്ങൾ പഠിച്ചുകഴിഞ്ഞാൽ, താഴെയുള്ള വീഡിയോയിൽ 6-Axis Arm-ന്റെ വ്യത്യസ്ത സ്വഭാവരീതികൾ തിരിച്ചറിഞ്ഞ് അവയെ ബ്ലോക്കുകളുമായി തുല്യമാക്കാൻ ശ്രമിച്ചുകൊണ്ട് നിങ്ങൾക്ക് ഈ കഴിവുകൾ പരിശീലിക്കാം. താഴെയുള്ള വീഡിയോ ക്ലിപ്പിൽ, 6-ആക്സിസ് ആം സുരക്ഷിത സ്ഥാനത്ത് നിന്ന് ആരംഭിച്ച്, തുടർന്ന് ടൈൽ ലൊക്കേഷൻ 32 ലേക്ക് നീങ്ങുന്നു. പിന്നീട് അത് ടൈലിലെ ചതുരങ്ങളുടെ താഴത്തെ നിരയിലൂടെ താഴെ വലത് കോണിലേക്ക് നീങ്ങുന്നു, തുടർന്ന് സിഗ്നൽ ടവറിലേക്ക് വലതുവശത്തുള്ള ചതുരങ്ങളുടെ നിരയിലൂടെ മുകളിലേക്ക് നീങ്ങുന്നു.
- 6-ആക്സിസ് ആമിന്റെ ഈ വീഡിയോ കണ്ട് തുടങ്ങൂ.
- 6-ആക്സിസ് ആം, സിഗ്നൽ ടവർ എന്നിവ നടത്തുന്ന എല്ലാ പെരുമാറ്റങ്ങളും തിരിച്ചറിയുക. അവ നിങ്ങളുടെ എഞ്ചിനീയറിംഗ് നോട്ട്ബുക്കിൽ രേഖപ്പെടുത്തുക.
- നിങ്ങളുടെ പെരുമാറ്റങ്ങളുടെ പട്ടിക ഗ്രൂപ്പ് അംഗങ്ങളുമായി താരതമ്യം ചെയ്യുക. പരസ്പരം സമാനമായതോ വ്യത്യസ്തമോ ആയ ഏതൊക്കെ സ്വഭാവരീതികളാണ് നിങ്ങൾക്കുള്ളത്?
- നിങ്ങളുടെ പെരുമാറ്റങ്ങളുടെ പട്ടിക VEXcode-ലെ ബ്ലോക്കുകളുമായി താരതമ്യം ചെയ്യുക. നിങ്ങൾ തിരിച്ചറിഞ്ഞ ഓരോ പെരുമാറ്റത്തിലും ഏതൊക്കെ ബ്ലോക്കുകളാണ് ഉള്ളത്? ഇവ നിങ്ങളുടെ എഞ്ചിനീയറിംഗ് നോട്ട്ബുക്കിൽ രേഖപ്പെടുത്തുക.
നിങ്ങളുടെ ധാരണ പരിശോധിക്കുക
അടുത്ത പാഠം ആരംഭിക്കുന്നതിന് മുമ്പ്, നിങ്ങളുടെ എഞ്ചിനീയറിംഗ് നോട്ട്ബുക്കിൽ താഴെയുള്ള ഡോക്യുമെന്റിലെ ചോദ്യങ്ങൾക്ക് ഉത്തരം നൽകി ഈ പാഠത്തിലെ ആശയങ്ങൾ മനസ്സിലാക്കിയിട്ടുണ്ടെന്ന് ഉറപ്പാക്കുക.
നിങ്ങളുടെ ധാരണാ ചോദ്യങ്ങൾ പരിശോധിക്കുക > (Google Doc / .docx / .pdf)
x-അക്ഷത്തിൽ നീങ്ങുന്നതിന് 6-ആക്സിസ് ആം എങ്ങനെ കോഡ് ചെയ്യാമെന്ന് മനസിലാക്കാൻ അടുത്തത് > തിരഞ്ഞെടുക്കുക.