
في الوحدة السابقة، قمت بتحريك الذراع الروبوتية المكونة من 6 محاور إلى نقاط طريق مختلفة، والتحرك على طول المحورين x و y واحدًا تلو الآخر. في بيئة الروبوتات الصناعية، هناك العديد من المواقف التي ستحتاج فيها إلى التحرك بطريقة متحكم فيها على محاور متعددة في وقت واحد.
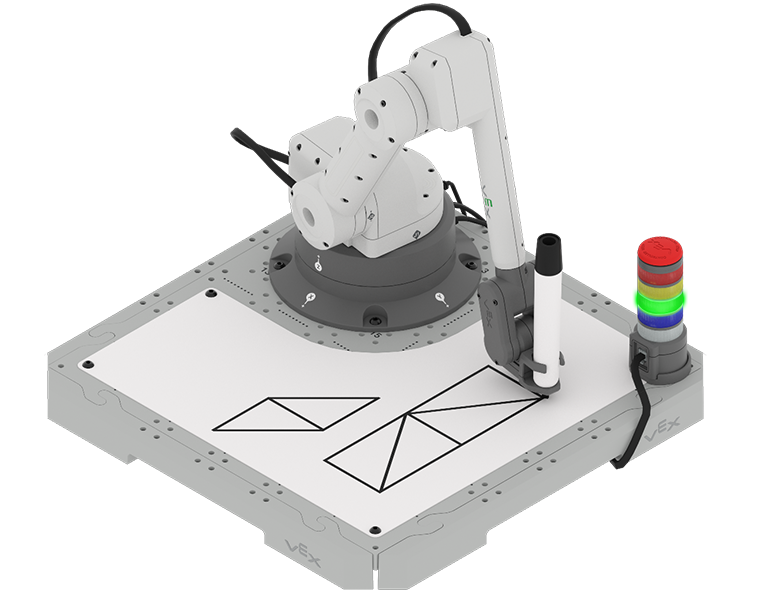
خلال الوحدة، ستتعلم كيفية العثور على الإحداثيات اللازمة لرسم شكل معين، وبناء فهمك لكيفية تحرك الذراع سداسي المحاور على طول محاور متعددة في مساحة ثلاثية الأبعاد. في نهاية الوحدة، ستطبق تعلمك لرسم أشكال متعددة على السبورة البيضاء.
المشاركة في إنشاء أهداف التعلم
الآن بعد أن شاهدت الفيديو، تعرف أنك سترمز إلى ذراع 6 محاور للتحرك في محاور متعددة في وقت واحد من أجل رسم الأشكال. أولاً، ستتعرف على كيفية تنسيق ذراع 6 محاور للحركة على طول محاور متعددة للتحرك في مسار قطري. ثم ستتعلم كيفية ترميز ذراع 6 محاور للتحرك ورسم مثلث. سوف تبني على هذه المهارة للعثور على الإحداثيات المفقودة، بحيث تقوم بترميز ذراع 6 محاور لرسم الجوانب المفقودة من المربع. سوف تسحب كل هذا معًا لرسم متوازي أضلاع ومستطيل في نهاية هذه الوحدة.
ستشارك في إنشاء أهداف التعلم مع مجموعتك ومعلمك لتسجيل هذه الأهداف، بحيث يكون لديك فهم مشترك لأهداف التعلم الخاصة بك للوحدة. ستكتب أهدافك التعليمية في دفتر ملاحظاتك الهندسية حتى تتمكن من الرجوع إليها في جميع أنحاء الوحدة.
من المفيد صياغة أهداف التعلم في شكل عبارات "أستطيع". يمكن أن تشمل أهداف التعلم النموذجية لهذه الوحدة ما يلي:
- يمكنني استخدام إحداثيات البداية وأطوال أضلاع المثلث لإيجاد الإحداثيات المفقودة اللازمة لرسم مثلث.
- يمكنني ترميز ذراع 6 محاور لرسم الأشكال.
- يمكنني استخدام التعليقات في VEXcode لتوثيق مشروعي.
لإنشاء أهداف التعلم الخاصة بك، قم أولاً بعصف ذهني حول ما ستحتاج إلى معرفته لتتمكن من إكمال الأنشطة الموضحة في الفيديو أعلاه. قم بعمل قائمة في دفتر ملاحظاتك الهندسية بما ستحتاج إلى معرفته وتعلمه والقيام به، مثل هذا:
- احسب الإحداثيات المفقودة للمثلث باستخدام نقطة البداية وطول الضلع.
- قم بترميز ذراع 6 محاور للتحرك في المحورين x و y في نفس الوقت.
- إضافة كتلة تعليق إلى مشروع.
- العمل بشكل تعاوني مع مجموعتي لبناء واختبار مشروعنا في النشاط.
| فئة هدف التعلم | أهداف التعلم |
|---|---|
|
أهداف المعرفة ما الذي أحتاج إلى معرفته وفهمه لكي أنجح في الوحدة؟ |
|
|
أهداف الاستدلال ما الذي يمكنني فعله بما أعرفه وأفهمه لكي أنجح في الوحدة؟ |
|
|
أهداف المهارة ما الذي يمكنني إظهاره لإظهار فهمي للمفاهيم والمهارات اللازمة للنجاح في الوحدة؟ |
|
بعد ذلك، شارك في إنشاء أهداف التعلم بناءً على قائمتك. فكر في كيفية تأطير كل من الأشياء التي أدرجتها في هدف تعليمي، باستخدام عبارات "أستطيع". يمكنك استخدام هذا النموذج لمساعدتك في كتابة أهدافك التعليمية في دفتر ملاحظاتك الهندسية. (Google Doc / .docx / .pdf)
على سبيل المثال، يمكن نقل عنصر القائمة "حساب الإحداثيات المفقودة للمثلث باستخدام نقطة بداية وطول ضلع" إلى هدف التعلم الذي يمكنني من خلاله استخدام إحداثيات البداية وأطوال أضلاع المثلث للعثور على الإحداثيات المفقودة اللازمة لرسم مثلث.
شارك أهدافك التعليمية مع معلمك. قم بتعديلها حسب الحاجة بحيث تكون أنت ومجموعتك ومعلمك متفقين جميعًا.
المفردات
في هذه الوحدة، ستتعلم كيفية ترميز الذراع سداسي المحاور للتحرك على محاور متعددة، بحيث يمكنك رسم الأشكال باستخدام الذراع سداسي المحاور. قائمة المفردات هذه موجودة هنا لتوفير مرجع لأي مصطلحات جديدة قد تصادفها. سجل هذه المفردات في دفترك الهندسي. استخدم هذه القائمة كمرجع أثناء عملك من خلال الوحدة والكلمات التي قد لا تكون على دراية بها.
- التعليقات
- كتل في VEXcode تضاف إلى المشاريع لشرح ما يريد المبرمج أن تفعله أجزاء من البرنامج.
- نقطة الطريق
- نقطة وسيطة بين موقعين على خط سير.
- حركة متعددة المحاور
- قدرة الذراع الروبوتية على التحرك في أكثر من اتجاه أو على طول أكثر من محور في نفس الوقت.
- مثلث قائم الزاوية
- مثلث بزاوية 90 درجة. الجانب المقابل لهذه الزاوية هو أطول جانب، والمعروف باسم الوتر. ويسمى الجانبان الآخران الساقين.
| الكمية | المواد اللازمة |
|---|---|
| 1 لكل مجموعة |
طقم خلية عمل CTE |
| 1 لكل مجموعة |
الكمبيوتر |
| 1 لكل مجموعة |
مصاريف VEXcode |
| 1 لكل طالب |
دفتر هندسي |
حدد التالي > للتعرف على كيفية تحريك الذراع المكون من 6 محاور في محاور متعددة.