
En la unidad anterior, moviste el brazo robótico de 6 ejes a varios puntos de referencia, moviéndote a lo largo de los ejes x e y de uno en uno. En un entorno de robótica industrial, hay muchas situaciones en las que tendrá que moverse de forma controlada a lo largo de múltiples ejes simultáneamente.
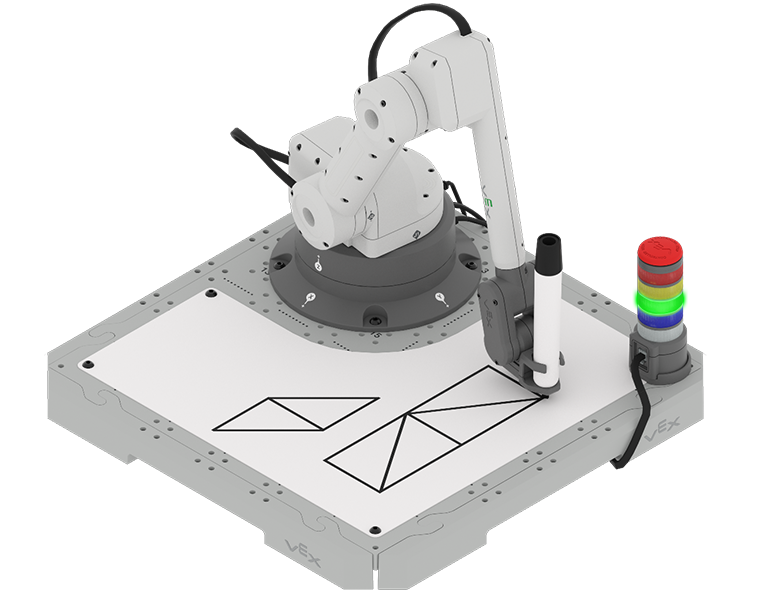
A lo largo de la Unidad aprenderás a encontrar las coordenadas necesarias para dibujar una forma específica, desarrollando tu comprensión de cómo se mueve el brazo de 6 ejes a lo largo de múltiples ejes en el espacio 3D. Al final de la unidad, aplicarás tu aprendizaje para dibujar varias formas en la pizarra.
Co-crear objetivos de aprendizaje
Ahora que has visto el vídeo, sabes que codificarás el brazo de 6 ejes para que se mueva en múltiples ejes simultáneamente con el fin de dibujar formas. Primero, aprenderá cómo el brazo de 6 ejes coordina el movimiento a lo largo de múltiples ejes para moverse en una trayectoria diagonal. A continuación, aprenderá a codificar el brazo de 6 ejes para moverse y dibujar un triángulo. Aprovecharás esta habilidad para encontrar las coordenadas que faltan, de modo que codifiques el brazo de 6 ejes para dibujar los lados que faltan de un cuadrado. Juntarás todo esto para dibujar un paralelogramo y un rectángulo al final de esta unidad.
Co-creará objetivos de aprendizaje con su grupo y su maestro para capturar estos objetivos, de modo que tenga una comprensión compartida de sus objetivos de aprendizaje para la Unidad. Escribirá sus objetivos de aprendizaje en su cuaderno de ingeniería para que pueda consultarlos en toda la Unidad.
Es útil formular objetivos de aprendizaje en forma de declaraciones de "yo puedo". Ejemplos de objetivos de aprendizaje para esta Unidad podrían incluir:
- Puedo usar una coordenada inicial y las longitudes de los lados de un triángulo para encontrar las coordenadas faltantes necesarias para dibujar un triángulo.
- Puedo codificar el brazo de 6 ejes para dibujar formas.
- Puedo usar Comentarios en VEXcode para documentar mi proyecto.
Para crear tus objetivos de aprendizaje, primero haz una lluvia de ideas sobre lo que necesitarás saber para poder completar las actividades que se muestran en el video de arriba. Haz una lista en tu cuaderno de ingeniería de lo que necesitarás saber, aprender y hacer, así:
- Calcular una coordenada faltante de un triángulo utilizando un punto de partida y una longitud lateral.
- Codifique el brazo de 6 ejes para que se mueva en los ejes x e y al mismo tiempo.
- Añadir un bloque de comentarios a un proyecto.
- Trabajar en colaboración con mi grupo para construir y probar nuestro proyecto en la actividad.
| Categoría de objetivo de aprendizaje | Objetivos de aprendizaje |
|---|---|
|
Objetivos de conocimiento ¿Qué necesito saber y comprender para tener éxito en la unidad? |
|
|
Objetivos de razonamiento ¿Qué puedo hacer con lo que sé y entiendo para tener éxito en la unidad? |
|
|
Objetivos de habilidad ¿Qué puedo demostrar para demostrar que entiendo los conceptos y las habilidades necesarias para tener éxito en la unidad? |
|
A continuación, co-crea objetivos de aprendizaje basados en tu lista. Piense en cómo cada una de las cosas que enumeró se puede enmarcar en un objetivo de aprendizaje, utilizando las declaraciones "Yo puedo". Puedes usar esta plantilla para ayudarte a escribir tus objetivos de aprendizaje en tu cuaderno de ingeniería. (Google Doc / .docx / .pdf)
Por ejemplo, el elemento de lista "Calcular una coordenada faltante de un triángulo usando un punto de partida y una longitud lateral" se puede cambiar al objetivo de aprendizaje de Puedo usar una coordenada inicial y las longitudes de los lados de un triángulo para encontrar las coordenadas faltantes necesarias para dibujar un triángulo.
Comparta sus objetivos de aprendizaje con su maestro. Ajústelos según sea necesario para que usted, su grupo y su maestro estén de acuerdo.
Vocabulario
En esta unidad, aprenderás a codificar el brazo de 6 ejes para que se mueva a lo largo de múltiples ejes, de modo que puedas dibujar formas con el brazo de 6 ejes. Esta lista de vocabulario está aquí para proporcionar referencia para cualquier término nuevo que pueda encontrar. Registra este vocabulario en tu cuaderno de ingeniería. Use esta lista como referencia a medida que trabaja en la Unidad y encuentre palabras con las que quizás no esté familiarizado.
- Comentarios
- Bloques en VEXcode que se añaden a los proyectos para explicar lo que un programador quiere que hagan las partes del programa.
- Waypoint
- Un punto intermedio entre dos ubicaciones en una línea de viaje.
- Movimiento multieje
- La capacidad del brazo robótico para moverse en más de una dirección o a lo largo de más de un eje al mismo tiempo.
- Triángulo derecho
- Un triángulo con un ángulo de 90 º. El lado opuesto a este ángulo es el lado más largo, conocido como hipotenusa. Los otros dos lados se llaman patas.
| Cantidad | Materiales necesarios |
|---|---|
| 1 por grupo |
Kit de celda de trabajo CTE |
| 1 por grupo |
Ordenador |
| 1 por grupo |
VEXcode EXP |
| 1 por estudiante |
Cuaderno de ingeniería |
Seleccione Siguiente > para obtener información sobre cómo mover el brazo de 6 ejes en varios ejes.